无极绳绞车运输控制系统优化设计
2022-07-08孙琦峥
孙琦峥
(沁源县应急管理局, 山西 长治 046500)
引言
随着煤矿开采业的不断发展,开采作业环境日趋复杂,多变坡、大倾角等危险系数较大的巷道成为煤炭企业生产的主流巷道,煤炭运输安全越来越受重视。无极绳绞车所控制的矿车在实际运输过程中会因轨道的影响而产生颠簸现象,矿车会在垂直方向发生小幅度位移与碰撞,使得矿车的安全系数大大降低[1]。
针对上述现象,本文拟通过运用基于位置的阻抗控制原理,通过调整矿车与轨道的实际作用力设计出一套矿车运行系统,并依据矿车系统设计出相应的无极绳绞车运输控制系统,合理控制矿车运行速度,提升无极绳绞车运输控制系统安全系数。
1 无极绳运输矿车设计研究
传统的无极绳运输矿车所采用的制动主要来自于无极绳绞车通过卷筒对钢丝绳长度控制来进行,该制动方法会使矿车在运行时产生垂直方向的位移与碰撞力,影响矿车安全。如果调小运行速度,会影响矿车运输效率,速度过大,矿车风险性会增大[2]。本文拟运用阻抗控制原理对矿车运行进行优化,改善矿车运行状态。
阻抗控制分为基于力的阻抗控制和基于位置的阻抗控制两种方式。由于基于力的阻抗控制对于动力学模型与矿车运行环境较为敏感,不适用于无极绳运输系统的实际运行,故本文采用基于位置的阻抗控制系统[3-5]。基于位置的阻抗控制系统是运用位置控制的方法进行内环控制,将阻抗控制器安装于位置控制器外实现控制的。在矿车运行时,矿车与轨道之间会产生作用力F,力传感器会对作用力F 进行实时监测,阻抗控制器对位置变化进行实时监测,当作用力F 发生变化时,阻抗控制器会对矿车位置进行相应的调整,从而保证矿车运行的稳定。其控制系统结构示意图如图1 所示。

图1 基于位置的阻抗控制结构示意图
2 无极绳绞车运输控制系统设计
2.1 DSP 控制硬件设计
为了实现对改进矿车的有效控制,传统的无极绳绞车运输控制系统已无法适应。运输控制是一个较为复杂的过程,需要通过精密的控制算法来实现。运输系统控制的主要目的是提升无极绳绞车运输控制系统的安全性。经综合分析发现,TI 公司的DSP芯片可作为无极绳绞车运输控制系统的核心控制元件,符合实际使用要求。
DSP 控制主要是通过力传感器进行数据采样的,由A/D 进行电路测量采样,可测量矿车自身重力与矿车、轨道作用力合力值,然后将数据传输给DSP芯片。通过外置编码器可测量出两组数据,运用平均值法即可算出矿车的平均运行速度,同样传输给芯片。芯片依据平均运行速度与作用力合力值通过芯片算法即可计算出矿车所需的控制速度,将该数值输入事件管理模块即可通过电机驱动控制矿车运行速度。
2.2 运输制动控制系统硬件设计
2.2.1 控制流程分析
运输制动系统主要是通过控制手压泵调整制动缸的加压强度,从而控制蝶形弹簧长度来进行制动力大小控制的。运输系统开始运行后,PLC 会依据传感器发出的脉冲信号进行矿车运行速度运算。当计算结果超出设定运行速度时,PLC 会发出预警信号,在警示灯亮起的同时启动电控阀,电控阀将依据信号对制动缸进行卸压,当制动缸内的压力油回流油箱后,蝶形弹簧就会变长,使得矿车闸片可与轨道接触实现制动效果。其制动流程示意图如图2 所示。
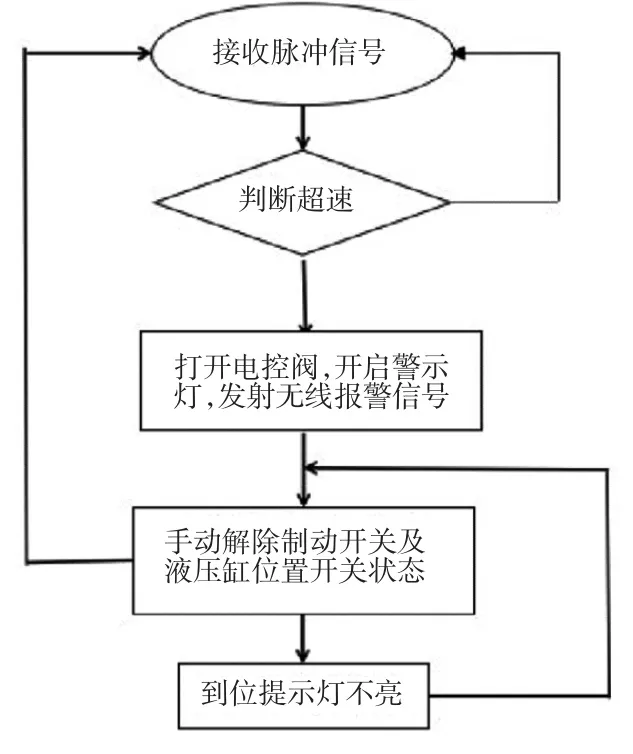
图2 制动流程示意图
2.2.2 测速装置设计
本文的测速装置主要运用霍尔传感器进行实时监测而实现,监测的采集点设定在车轮内侧。当矿车开始运行后,固定于车轮中间圆盘的磁铁转动会对霍尔传感器实现交替导通,通过后续信号处理后可得到相应的脉冲信号,从而换算出矿车车轮的实际运行速度。本文拟在车轮上设定8 个均匀分布在圆盘周围的磁铁,通过实际测量可知,矿车车轮周长为0.35π,实际运输制动速度为1.38 m/s,则制动转速为0.79 r/s,频率为10.05 Hz。因此,当PLC 所接受的制动频率达到10.05 Hz 以上,制动系统才进行制动。
2.2.2.1 发射装置设计
本文的发射装置选取Micrel 公司的MCIRF102发射器,该发射器具有幅度键控功能,调幅强、抗干扰能力强,同时还有集成度高、外部元件使用少、操作使用简单等优点,是一款高稳定性、高性价比的产品。其具体参数如表1 所示。

表1 MCIRF102 发射器工作参数表
依据发射器的工作参数可对振荡器进行选择,外置振荡器频率计算公式如下:

式中:FT为发射频率,MHz;FR为外置振荡器频率,MHz。
依据过往经验,发射频率通常选择315 MHz,代入式(1)后可得,外置振荡器频率为9.843 MHz,外置振荡器频率由晶振发生,其等效串联电阻应小于20 Ω。
2.2.2.2 无线接收装置设计
无线接收装置选用Micrel 公司的MICRF007 单片接收器,采用QwikRadio TM 技术,无须手工调谐,适用于无线接收。MICRF007 接收的具体工作参数如表2 所示。
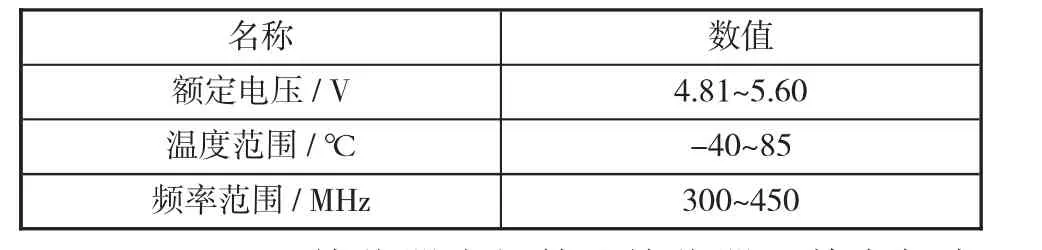
表2 MICRF007 接收器工作参数表
MICRF007 接收器为超外差接收器,其内部本振频率与发射器的发射频率的差值应为中频IF 中心频率,内部本振频率的计算公式如下:

式中:FL为内部本振频率,MHz;FT为发射器的发射频率,MHz。
对于任意发射器的发射频率会存在下边带混频与上边带混频两个内部本振频率,当选择确定的内部本振频率数值后,由公式(3)可计算出基准振荡器频率:

式中:Ft为基准振荡器频率,MHz;FL为内部本振频率,MHz。
由于接收发射器的发射频率数值为315 MHz,代入式(2)计算,并通过查询常用振荡器频率表后可以得出,晶振的选择为4.8970 MHz。
3 系统测试
按上述设计组成无极绳绞车运输控制系统并进行相应测试后发现,无极绳运输矿车可依据运行环境实时调整矿车与轨道作用力,调整矿车运行速度,保证矿车安全平稳运行,并经500 h 测试后无极绳绞车运输控制系统无任何故障发生,因此可应用于实际生产之中。
4 结论
随着煤矿开采业的不断发展,辅助运输在日常生产中的作用越来越重要。大倾角、多变坡等危险系数较大巷道的出现,使得无极绳绞车运输系统安全问题越来越严重。本文通过对无极绳绞车运输控制系统进行优化设计研究,得出了以下结论:
1)运用阻抗原理设计出无极绳运输矿车自适应控制方案,矿车可依据运行环境实时调整矿车与轨道作用力与速度,保证矿车的平稳运行。
2)针对无极绳运输矿车自适应控制方案设计出相应的无极绳绞车运输控制系统,完美匹配了矿车自适应方案,并对该设计进行了实际测试。经测试,无极绳运输矿车运行安全平稳,运行状态可实时调节且500h 内无故障发生。