主动共振浮力摆式波浪能发电装置水动力性能研究
2022-07-08邓胜忠熊必康陈启卷
徐 磊,邓胜忠,熊必康,陈启卷*
(1.武汉大学动力与机械学院,湖北 武汉 430072;2.中广核研究院有限公司,广东 深圳 518000)
随着海洋战略的深度实施,海上装置诸如海洋浮标、海上牧场等能源持续供给问题日益突出,其中,海洋浮标数量众多且亟需持续可靠供电用于观测和通信。目前,大多数海洋浮标采用光伏和蓄电池联合供电[1],持续稳定供电能力不足,观测和通信受到极大限制,远不能满足军民对海洋实时信息的需求。因此,如何高效利用海洋丰富的能量为海洋浮标提供持续可靠的电力,是目前亟需研究的课题。
波浪能作为一种新型清洁能源,利用其为浮标供电是非常理想的解决方案。与其他能源相比,它具有分布广泛、储量巨大、能量密度大等优势[2]。同时波浪能主要分布在海洋表面浅层,发电装置可布放于浮标下方,对浮标整体结构的影响小。将波浪能发电技术和海洋浮标用电相结合,既能解决波浪能电力的消纳问题,又能满足浮标用电的能源需求,做到“海电海用”,实现海洋资源的综合利用,加速推进海洋产业的发展。
我国非常重视波浪能的开发与利用,各具特色的波浪能发电装置层出不穷。具有代表性的装置有:中国科学院广州能源研究所研制的鹰式装置[3]、山东大学的浮体绳轮式装置[4]、集美大学的阵列筏式装置[5]等。尽管波浪能发电装置的研究延绵至今,但是该领域的技术尚未完全成熟,商业化形势依然严峻[6]。主要问题在于装置的发电效率及生存可靠性制约了装置成本。目前,国内外大多数波浪能发电装置仅能保证在部分海况下的高效发电[7],实际海况复杂多变,必须扩大装置高效发电的海况范围,才能有效增加装置的发电量,进一步增加高效发电时长,提升实际海况的发电效率。另外,装置的生存可靠性也必须考虑,在恶劣海况下,装置的活动部件如果不加以保护就必然会被破坏。
为解决上述问题,武汉大学设计了一种主动共振浮力摆式波浪能转换装置。该装置与海洋浮标相结合,利用其宽频带多海况共振高效发电的特性,为海洋浮标提供充足可靠的电力。发电主体直接布置在海洋浮标下方,对海洋浮标整体结构的影响较小;发电主体装置除摆体外其他运动部件不与海水接触,可靠性高;摆体工作时淹没在海水中,其吸收波浪转换能量的过程也间接减少了波浪对浮标的冲击和破坏。本文基于该浮力摆式波浪能发电装置,在AQWA 中搭建模型,研究装置在不同淹深及重心位置下水动力参数的变化,对摆体的激励力、辐射阻尼、附加质量、幅值响应算子(Response Amplitude Operator,RAO),即浮体对应自由度运动幅值与波幅的比值进行了对比分析。
1 主动共振浮力摆式波浪能发电装置
1.1 装置原理
主动共振浮力摆式波浪能转换装置结构拟采用图1 所示的设计方案。为了解决波能转换装置生存可靠性差的问题,该设计方案利用摆体外壳将活动部件同海水隔离开,以此避免海水对关键部件的冲击和腐蚀,同时有效阻止水生物的附着[8];发电时装置中摆体淹没在海水中,其吸收波浪转换能量的同时也间接减少了波浪对浮标的冲击和破坏[9]。

图1 主动共振浮力摆式波浪能发电装置
整个发电装置利用支架布置在海洋浮标下方,浮标上的波能转换装置升降机构(包括步进电机、电磁制动器、丝杆、导杆)可通过改变浮力摆摆体的上下位置实现装置淹深的调节。浮力摆摆体里封装配重、配重抬升机构(包括步进电机、电磁制动器、丝杆、导轨)、轴、齿轮传动机构和发电机,其中配重位置由同浮力摆摆体固接在一起的配重抬升机构实施调节。浮力摆摆体、配重和配重抬升机构同步绕轴摆动,并通过齿轮传动机构增速后驱动固接在轴上的发电机旋转发电。发电机和配重抬升机构的电路在浮力摆摆体内汇集后均通过轴和支架内的孔道一并引至浮标上,独立发电系统的其他电气部分亦布置于浮标上。
主动共振浮力摆式波浪能转换装置利用完全浸没于水下的浮力摆在波浪激励下绕水平轴摆动进而带动发电机发电,同时可减少风浪冲击和能量辐射。该装置的特色在于包含两个调节机构:配重位置调节机构和浮力摆升降机构,它们分别可实现宽频带多海况共振高效发电和保护装置免遭恶劣海况破坏的功能,提高了装置发电效率和长期运行的可靠性。配重位置调节机构可对配重块相对于浮力摆的垂直位置进行调节,改变浮力摆静水回复力矩和转动惯量,同时调节等效刚度和等效惯量[10],从而改变浮力摆自振频率使其与波浪频率一致,实现浮力摆与不同周期的波浪共振,进而提高发电效率[11]。浮力摆升降机构能够调整浮力摆相对于海洋浮标的位置,从而达到调整摆体下潜深度的作用,当装置遭遇极端天气时,可以使摆体下潜到一定的位置,避免遭到破坏。此外,浮力摆内部配重的整体质量较大,而在海水中垂直方向上的浮力与重力的合力小,因此上下调整摆体位置时所提供的驱动力也较小。两个机构可在波况变化时起到合适的调节作用,在装置安全可靠运行的前提下提高发电效率。
1.2 共振调节
主动共振浮力摆式波浪能发电装置的运动规律和受力如图2 所示,其中A点为浮力摆的铰接点;M为配重块质心;P为摆体质心;B为浮力摆浮心;FW为激励力;FR为辐射力;FB为浮力。
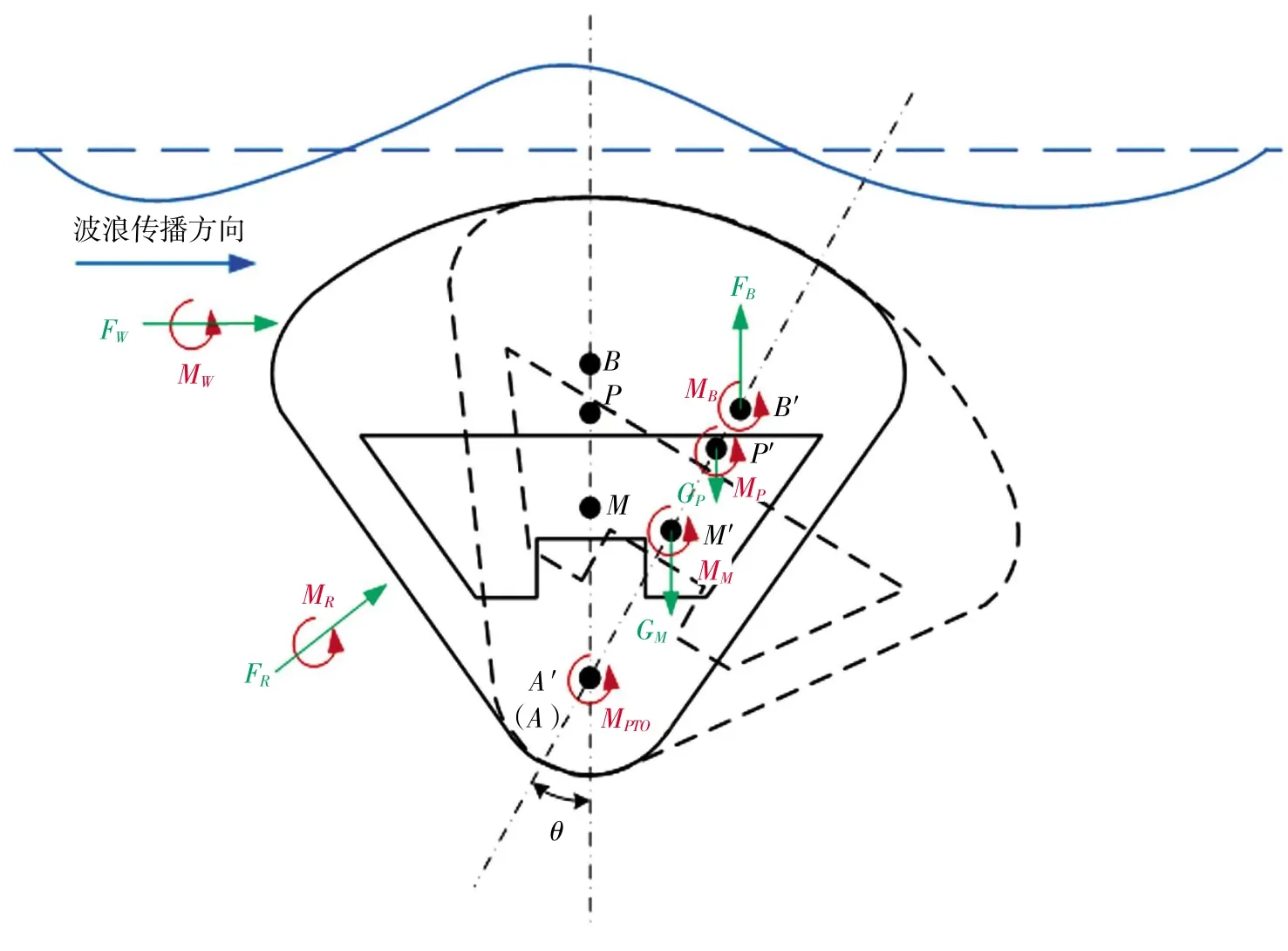
图2 装置运动规律和受力示意图
浮力摆受纵摇方向上激励力矩的作用绕过A点的主轴摆动发电,浮力摆力矩平衡方程如下。

式中,JP+M表示浮力摆(即摆体和配重块)相对于A点的转动惯量;θ表示摆角;MW、MR、MPTO、MB、MP和MM分别表示激励力矩、辐射力矩、PTO(Power Take Off)力矩、浮力矩、摆体重力矩和配重块重力矩,其中MR、MB、MP、MM表达式如下。
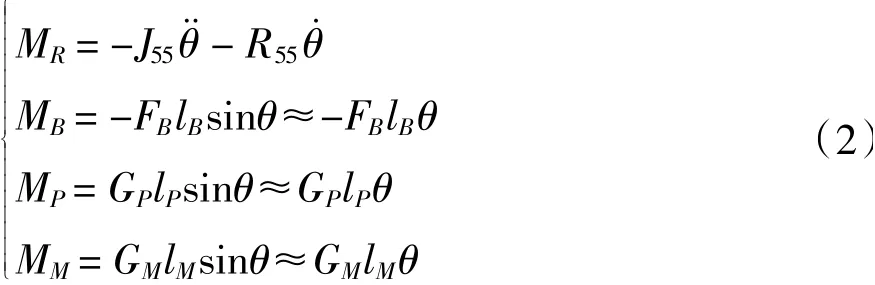
式中,J55和R55为纵摇方向上换算到A点的附加质量和辐射阻尼;FB、GP和GM分别为浮力、摆体重力和配重块重力;lB、lP和lM分别为浮心B、摆体质心P和配重块质心M到A点的距离。因此,式(1)可以进一步转化为式(3)。

由式(3)可得浮力摆的自振频率ωP+M如式(4)。
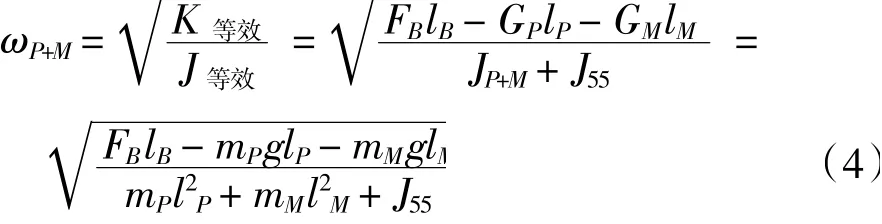
式中,K等效和J等效分别为浮力摆的等效刚度和等效惯量;mP和mM分别为摆体和配重块的质量;g为重力加速度。由式(4)可知,仅通过调节配重块上下位置(即lM),就可以大幅调整等效刚度和等效惯量,从而大范围调节浮力摆自振频率。
2 基于AQWA 的浮力摆水动力模型
ANSYS AQWA 是基于势流理论采用边界元方法求解物体水动力参数的软件。势流是指流体中速度场是标量函数(即速度势)梯度的流,假设流体无粘性、运动无旋且不可压缩[12]。其速度势函数可以表示如下。

式中,ΦI为波浪未经浮体扰动的入射势;ΦD为波浪穿过浮体后产生的波浪绕射势;ΦR为辐射势,由浮体运动产生。
需要满足的边界条件如下。
(1)在波浪的作用下,浮子会产生六个自由度运动,速度势在流场内满足拉普拉斯方程。

(2)海底边界条件:

式中,h为水深。
(3)自由表面边界条件:

(4)浸没物体表面条件[13]:

式中,uj、nj为运动速度的法向分量。
(5)辐射条件:辐射波无穷远处速度势趋近于0。

在规则波中,作用于物体的激励力可以看作是Froude-Krylov 力和绕射作用力的叠加[14]。

式中,Fe(ω)为激励力;FFK(ω)为Froude-Krylov力;Fd(ω)为绕射力。
摆体的主要设计参数如表1 所示,浮力摆的长度和高度分别为平面结构的横向长度和垂直高度,宽度为装置的迎波宽度,如图3 所示。
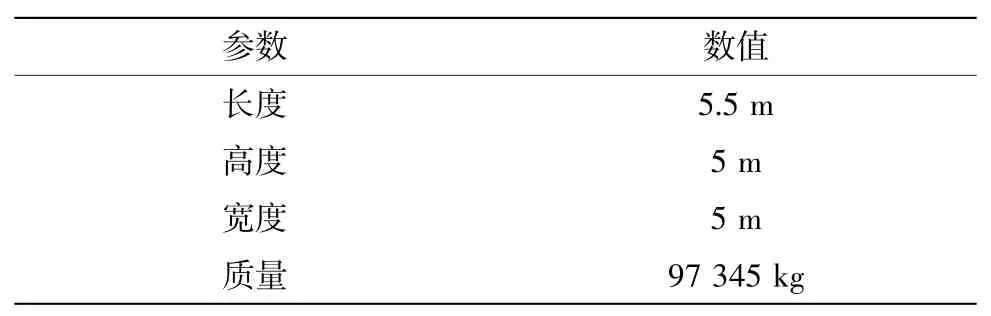
表1 摆体主要参数
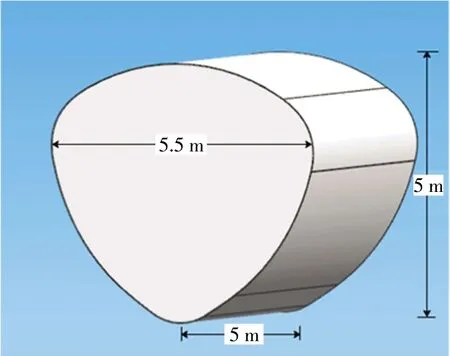
图3 摆体模型简化图
根据设计的浮力摆摆体相关参数,利用绘图软件UG 建立了摆体的三维模型,然后导入浮体分析软件AQWA,利用其中的mesh 模块生成表面网格单元。频域分析的频率范围取决于网格划分的尺寸大小,本文选择设定最小网格尺寸为0.2 m,水深为1 000 m,水密度为1 025 kg/m3,计算的频率范围为0~0.8 Hz,为保证曲线准确,设置80 个插值点确定一条曲线。最终模型网格的划分如图4 所示。
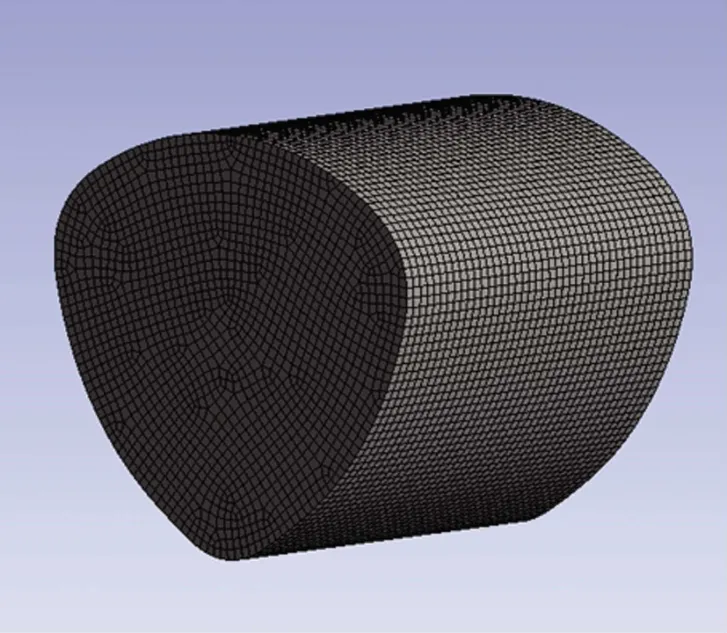
图4 摆体模型网格划分
3 仿真结果分析
基于势流理论建立摆体模型之后,可以计算激励力、辐射阻尼、附加质量、RAO等水动力参数[15]。摆体不同的特性对其水动力参数影响不同,本文选择了淹深和重心位置两个参数研究摆体纵摇时水动力参数的变化情况。为了方便后文计算分析,这里设淹深为L,为水面到摆体最低点的距离;设重心位置为H,为重心到摆体最低点的距离。
3.1 淹深对摆体水动力参数的影响
为了探究淹深对摆体的影响,选取了4 组不同的淹深,分别为:5.5 m、6.0 m、6.5 m、7.0 m,重心位置为1.0 m。
图5表示摆体淹深对激励力的影响。相同频率情况下,激励力随淹深的增大而减小,当淹深等于5.5 m 时达到最大;相同淹深情况下,激励力先随着频率增大而增大,在波频为0.22 Hz 附近时达到最大,随后减小,当波频减小到0.4 Hz 附近时又有一小段缓慢的增加,最后下降趋近于0。
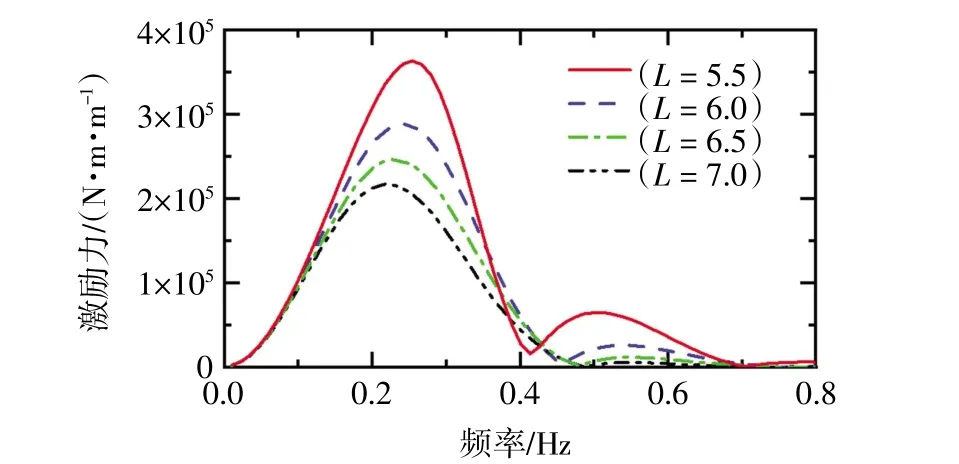
图5 不同淹深摆体的激励力
图6为摆体的辐射阻尼随波浪频率变化的曲线。整体的变化趋势与激励力曲线相似,波浪频率为0.3 Hz 时,辐射阻尼达到最大。
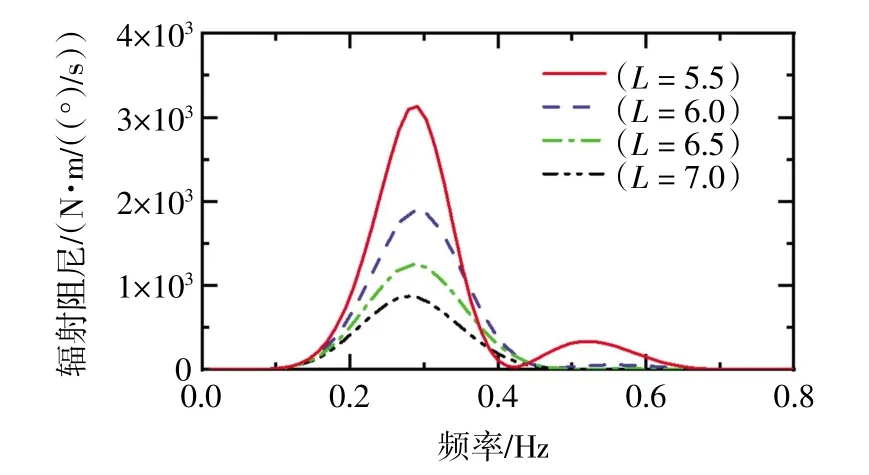
图6 不同淹深摆体的辐射阻尼
图7为不同淹深下摆体附加质量随波浪频率变化的曲线。当淹深较小时,附加质量随波浪频率变化比较明显。4 组曲线变化趋势类似,先随着波浪频率的增大而逐渐增大,在0.2 Hz 时达到最高点,随后逐渐减小,当波浪频率到0.34 Hz 附近时降到极小值,最后再缓慢增加,逐渐趋于稳定。
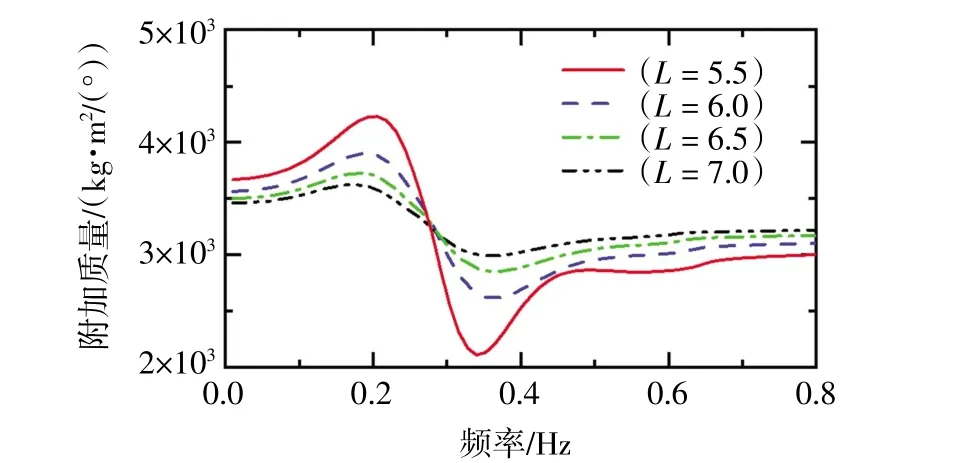
图7 不同淹深摆体的附加质量
为了计算不同海况下波浪频率对摆体发电效率的影响,本文通过分析RAO来确定装置捕能功率,同时得到浮力摆自振频率。图8 为不同淹深的摆体RAO随波浪频率变化的曲线。淹深为5.5 m 的摆体RAO随着波浪频率变化而变化的趋势较为明显,淹深为7.0 m 的曲线峰值最小。四组不同淹深的摆体RAO曲线变化趋势较为类似,都是随着波浪频率的增大而不断增大,直到在0.22 Hz 时达到峰值,然后随着波浪频率的继续增大而逐渐减小,直至频率为0.4 Hz 时减小为0。
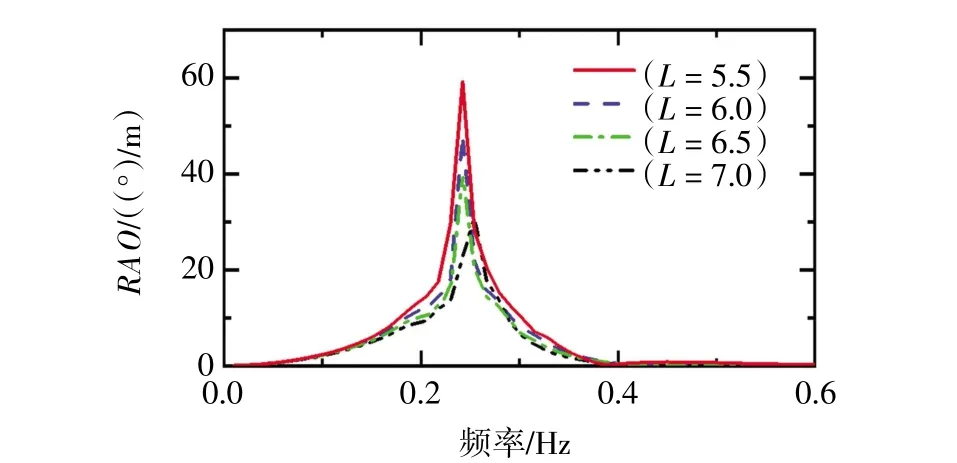
图8 不同淹深摆体的RAO
3.2 重心位置对摆体水动力参数的影响
基于以上关于淹深对摆体水动力参数的影响,综合考虑装置安全性和捕能效果等因素,本文选择淹深5.5 m 为基准,通过调整摆体重心的高度,研究重心对摆体水动力参数的影响。本文选择的重心位置分别为1.0 m、1.5 m、2.0 m 和2.5 m。
图9表示摆体的重心位置对激励力的影响。总体上看,重心位置越低,波浪频率对激励力影响越明显;重心位置越高,波浪频率对激励力影响越小。当波浪频率为0.01~0.5 Hz 时,重心位置为1.0 m、1.5 m、2.0 m 的3 条曲线变化趋势类似,其峰值都在频率为0.24 Hz 附近;而重心位置为2.5 m时,所受激励力的峰值向高频偏移,在频率为0.39 Hz 时达到最大值;在波浪频率大于0.5 Hz 时,重心位置对激励力的影响几乎可以忽略。
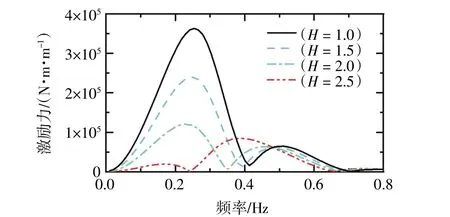
图9 不同重心位置摆体的激励力
图10为不同重心位置下摆体的辐射阻尼随波浪频率变化的曲线。整体的变化趋势与激励力曲线保持一致,当重心位置为1.0 m、1.5 m、2.0 m 时,辐射阻尼最大值的位置随重心位置的上升而向低频偏移并逐渐减小;当重心位置为2.5 m 时,辐射阻尼在频率为0.42 Hz 时达到最大值。
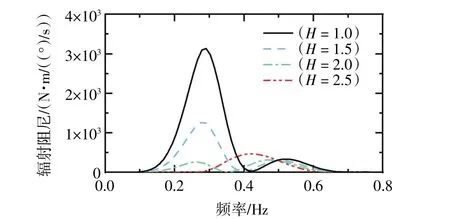
图10 不同重心位置摆体的辐射阻尼
不同重心位置对摆体附加质量的影响如图11所示。当重心位置为2.0 m 或2.5 m 时,附加质量较小且几乎不随波浪频率的改变而改变。当重心位置为1.0 m 或1.5 m 时,附加质量曲线变化趋势类似,首先都是在波浪频率为0.21 Hz 时达到极大值,随后逐渐减小,当频率增加到0.33 Hz 时达到极小值,最后逐渐增加,趋于稳定值。

图11 不同重心位置摆体的附加质量
图12为不同重心位置对摆体RAO的影响曲线。4 组摆体的RAO均随着波浪频率的升高先增大后减小,当波浪频率小于0.1 Hz 或大于0.35 Hz 时趋近于0。波浪频率在0.1~0.35 Hz 时,RAO变化幅度较大,其中重心位置为1.0 m 的RAO最大,这时波浪频率为0.24 Hz;重心位置为2.5 m 的RAO最小,波浪频率为0.12 Hz。
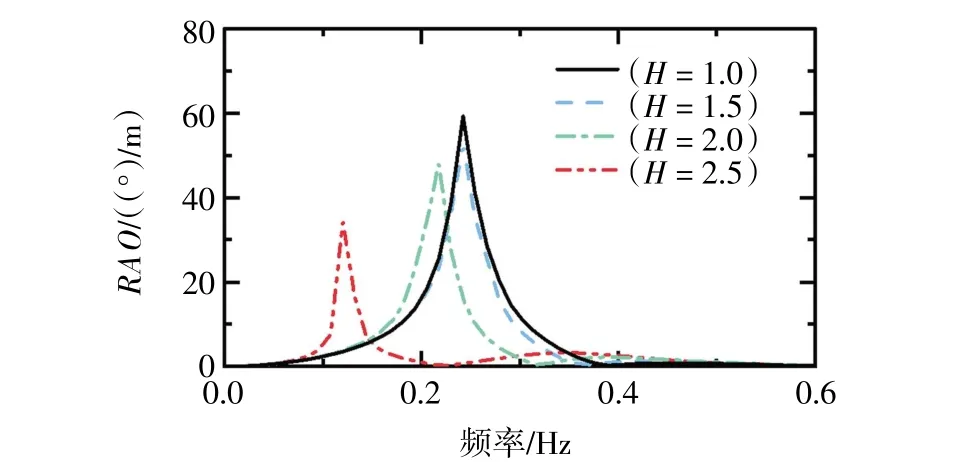
图12 不同重心位置摆体的RAO
4 结 论
本文针对目前海洋浮标持续供电不足,电池需要经常更换,耗时成本高等问题,设计了一种主动共振浮力摆式波浪能发电装置为其供电,该装置有以下特点:①该装置可大范围调节浮力摆等效刚度和等效惯量,实现浮力摆与不同周期的波浪共振,进而提高发电效率;②该装置除摆体外其他运动部件不与海水接触,可避免海水冲击和腐蚀,同时可有效阻止水生物的附着,并且可通过增加浮力摆的下潜深度避免恶劣海况下的波浪冲击;③该装置无需船体,可直接布置于浮标下方,对浮标整体结构的影响小。
利用AQWA 软件进行模拟仿真,分析摆体的水动力参数可以得出以下结论。
(1)在相同的波浪频率条件下,不同的淹深和重心位置都会对摆体纵摇时的激励力、辐射阻尼、RAO 和附加质量产生很大影响。其中重心位置对水动力参数的影响更大。
(2)当摆体的淹深不变,通过调整配重位置改变其重心位置时,摆体共振频率的变化范围很大,由此可以证明仅通过调节配重块上下位置,就可以大幅调整等效刚度和等效惯量,从而大范围调节浮力摆的自振频率。
(3)分析影响摆体的水动力特性的因素,对于提高进行实海况下装置运行时的发电效率,具有较好的指导意义,该装置可为海上固定平台、海上牧场和海岛等提供可靠的电能。