基于小波变换的边缘检测技术
2022-07-08刘光宇曾志勇赵恩铭邢传玺
刘光宇 刘 彪 曾志勇 赵恩铭 邢传玺
(1. 大理大学 工程学院, 云南 大理 671003;2. 哈尔滨工程大学 物理与光电工程学院, 哈尔滨 150001;3. 云南民族大学 电气信息工程学院, 昆明 650031)
0 前 言
边缘检测是图像处理的关键技术,在图像分割、识别等领域有着重要的应用[1-2]。边缘检测一般包括图像滤波、图像增强、图像检测以及图像定位等 4个步骤[3]。传统的图像边缘检测方法有2种:一种是基于查找的一阶微分算子,包括Sobel算子[4]、Roberts算子、Prewitt算子等;另一种是基于零穿越的方法,该方法是寻找图像像素点二阶导数的零交叉点,并采用平滑滤波,降低噪声的影响。但是,采用这些算子提取的图像效果并不理想。文献[5]中,Roberts算子对复杂边缘信息提取不全。文献[6]中,Canny算子具有很好的信噪比,图像定位更加准确,但提取的图像存在部分虚假边缘,在具体应用上,具有一定的局限性。文献[7]中,由传统小波变换得到的边缘定位不良,图像容易产生伪边缘。文献[8]中,传统Sobel算子结构简单,但其并没有对图像的主体与背景进行严格区分。针对以上问题,考虑在小波变换的基础上,采用 Roberts算子对图像的边缘信息进行提取。
1 Roberts算子
Roberts算子是利用局部差分,寻找边缘的梯度算法[9]。首先,对每一个梯度的像素值进行计算;然后,依次求取每个梯度的绝对值;最后,在一定阈值下,进行梯度运算的综合操作。Roberts算子常用来处理低噪声图像,当图像边缘接近+45°或-45°时,该算子的处理效果更理想。
Roberts算子公式如式(1)所示:
(1)
式中:g(x,y)表示梯度幅值的近似值;f(x,y)表示坐标点(x,y)处的二维信号。
通过差分运算,计算g(x,y),并设定合理的阈值Th。若g(x,y)>Th,说明该点为阶跃状边缘点[3];反之,则说明该点不是边缘点。Roberts算子的物理聚焦效果较好,但没有对图像进行均值化处理,因此不适用于提取具有陡峭边缘的图像。
2 小波变换方法
图像边缘是指特定区域灰度值发生突变的地方。小波变换具有良好的局部特性和多分辨率分析等特点,能实际多尺度逼近边缘,因此适用于边缘检测[5]。通过小波变换的模极大值点,可以判断图像边缘的具体位置。
2.1 二维小波变换
图像存在于x轴和y轴的交叉区域,其中每个像素点都有其对应的坐标点,每个坐标点的时域,显示为一个连续的二维信号。小波变换一般采用二维离散的方法,即对二维图像信号在水平和垂直方向,进行一维离散小波变换。
二维连续小波公式如式(2)所示[10]:
(2)
式中:ψ(x1,y1)表示二维基本小波;ψa;x2,y2(x1,y1)表示ψ(x1,y1)的尺度伸缩和二维位移;a表示伸缩因子;b表示位移因子;x2、y2表示发生位移后的坐标。
对二维连续小波进行小波变换,如式(3)所示:
WTf(a;x2,y2)=

(3)
式中:f(x1,y1)表示坐标点(x1,y1)的二维信号,f(x1,x2)∈L2(R2)。
与一维小波相比,二维小波操作相对复杂,需要对其进行尺度收缩和坐标旋转,如式(4) — 式(5)所示:
A=crθ
(4)
(5)
式中:c表示尺度因子;rθ表示旋转因子。
二维小波的变换方程如式(6)所示:
(6)

2.2 Mallat算法
Mallat算法的原理是,通过信号f(x,y),将尺度J转换到Vj和Wj,得到离散逼近值ajf、djf。其中,Vj和Wj为存在于L2(R)的两个相交空间。分解尺度设置为J+1,将ajf分解到对应的子空间Vj+1和Wj+1上,按照上述方法依次迭代,从而实现多分辨率的分解。信号f(x,y)的多尺度分解过程,如图1所示。
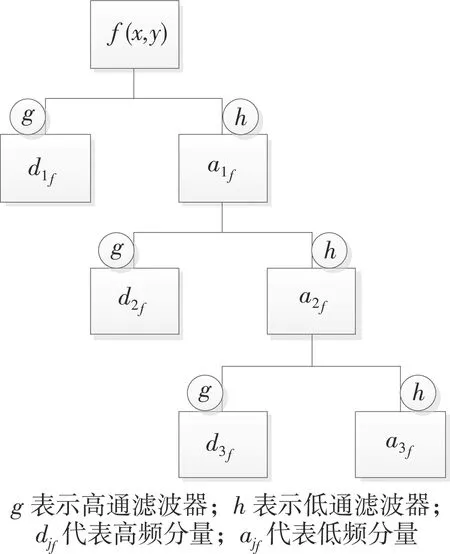
图1 信号f(x,y)的多尺度分解过程
二维离散小波变换Mallat分解,如式(7) — 式(8)所示:
(7)
(8)

将式(7)和式(8)代入小波函数,得到Mallat的塔式算法,如式(9)所示:
(9)
2.3 小波模极大值计算
对于任意图像像素点p(x,y),小波变换在水平和垂直方向得到的小波系数都是独立的,可以利用向量原理计算它的模和幅角[11]。
设θ(x,y)为二维光滑函数,满足式(10):
(10)
求取θ(x,y)在x,y方向的一阶导数,得到2个基本小波,如式(11)所示:
(11)
其相应的二维小波变换,如式(12)所示:
(12)
小波变换模定义,如式(13)所示:
(13)
将梯度的模转化为梯度相角,可得到式(14):
(14)
采用Mallat算法,得到梯度矢量,梯度矢量方向即为梯度模局部极大值的方向。沿着梯度矢量方向检测小波变换系数模的局部极大值点,即可得到图像的边缘点[12]。
3 小波变换边缘检测算法的实现
利用小波变换的边缘检测算法,对图像进行边缘检测,具体操作如下(见图2):
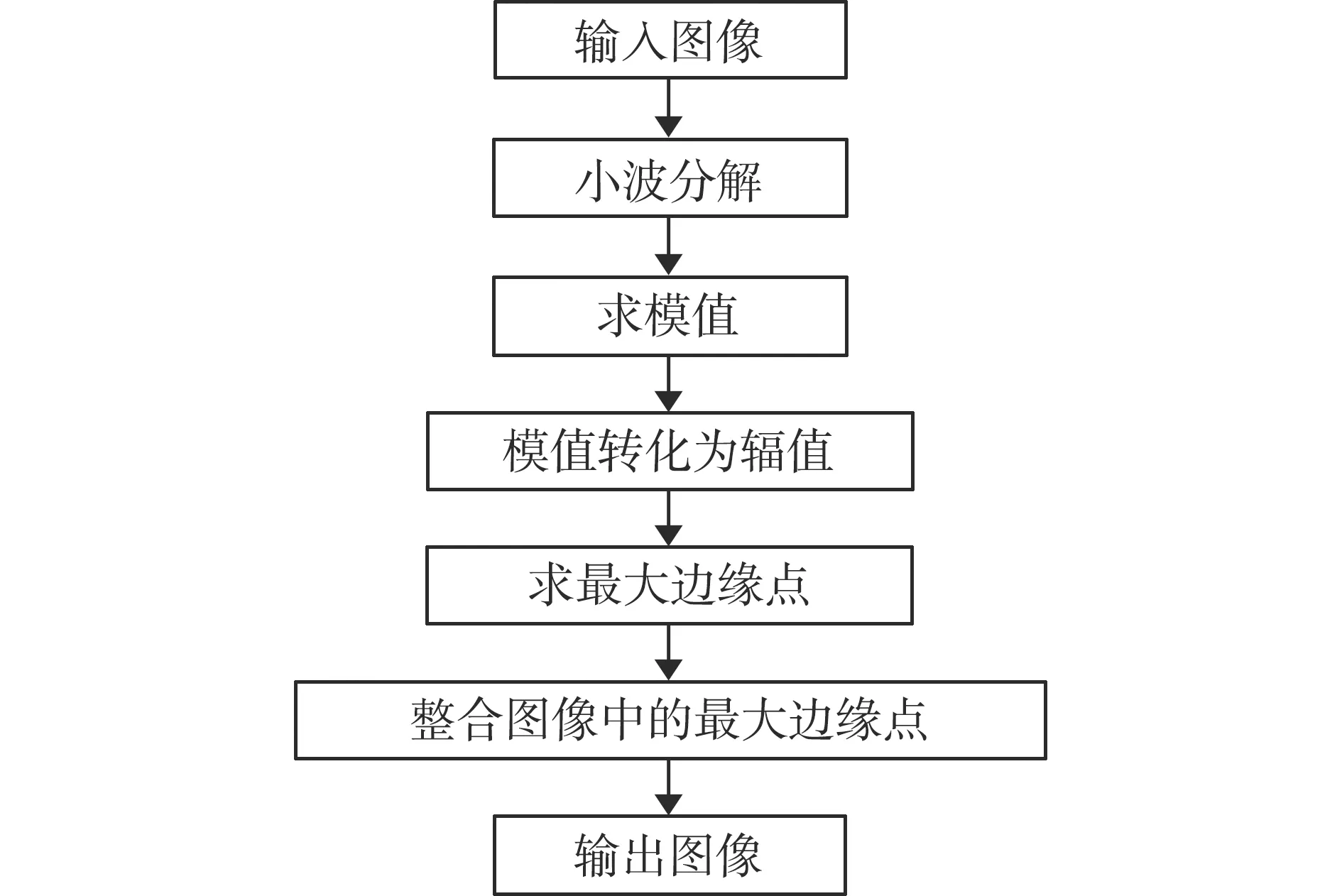
图2 基于小波变换的图像边缘检测步骤
(1) 输入图像。
(2) 对图像进行小波分解。
(3) 求取小波变换系数的模值。如式(15)所示:

(15)

(4) 模值转化为辐值。对幅角进行4等分(见图3),计算0°、45°、90°、135°等方向的偏导数、水平和垂直方法的差方,计算特殊区域的模值,并将其转换为幅值。
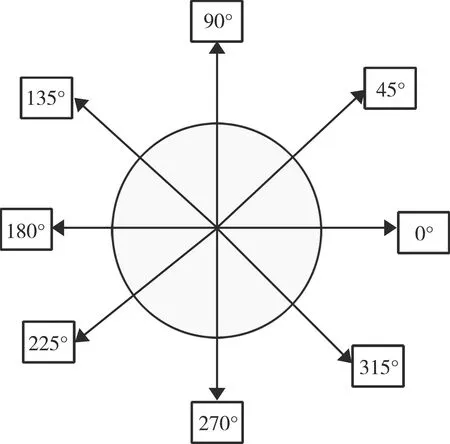
图3 幅度划分图
(5) 求最大边缘点。按前面各方向依次对每一个像素点进行检测。如果检测到极大值点,保留并记录为边缘点;否则,梯度值设为0。
(6) 整合图像中的最大边缘点。利用小波变换尺度的多样性,对图像中的边缘点进行融合。
(7) 输出图像。
4 仿真实验和结果分析
4.1 边缘图像的对比
选取一张像素为512×512的瓷砖图像,对其进行灰度值计算,结果如图4所示。
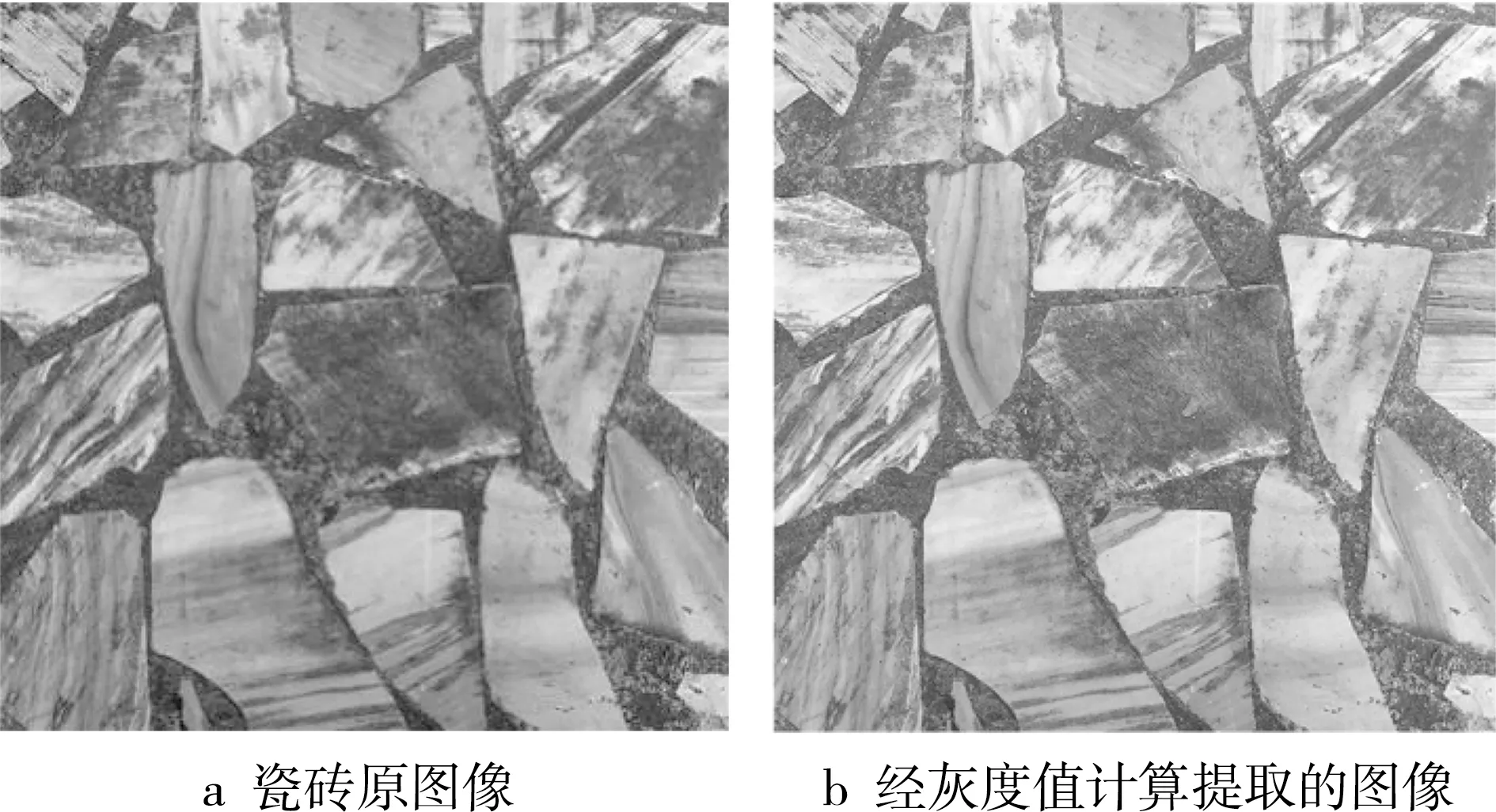
图4 图像对比
设置分解尺度J=1,采用低通、高通滤波器对图4进行卷积和偏导,生成第一级小波分解图像,如图5所示。第一级小波分解提取的图像边缘轮廓信息较少,无法分辨出所有地砖的模型,只能分辨出明显的突变点,并且图像背景中包含许多虚假信息。
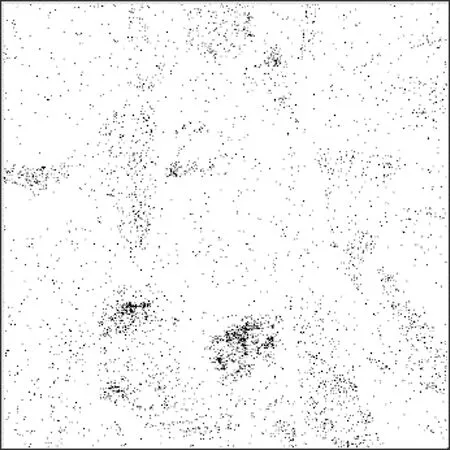
图5 第一级小波分解的图像边缘
设置分解尺度J=2,更新低通、高通滤波器,进行卷积和偏导,生成第二级小波分解,结果如图6所示。与第一级分解相比,第二级小波分解得到的图像拥有更多的边缘细节,但图像边缘仍然比较模糊。
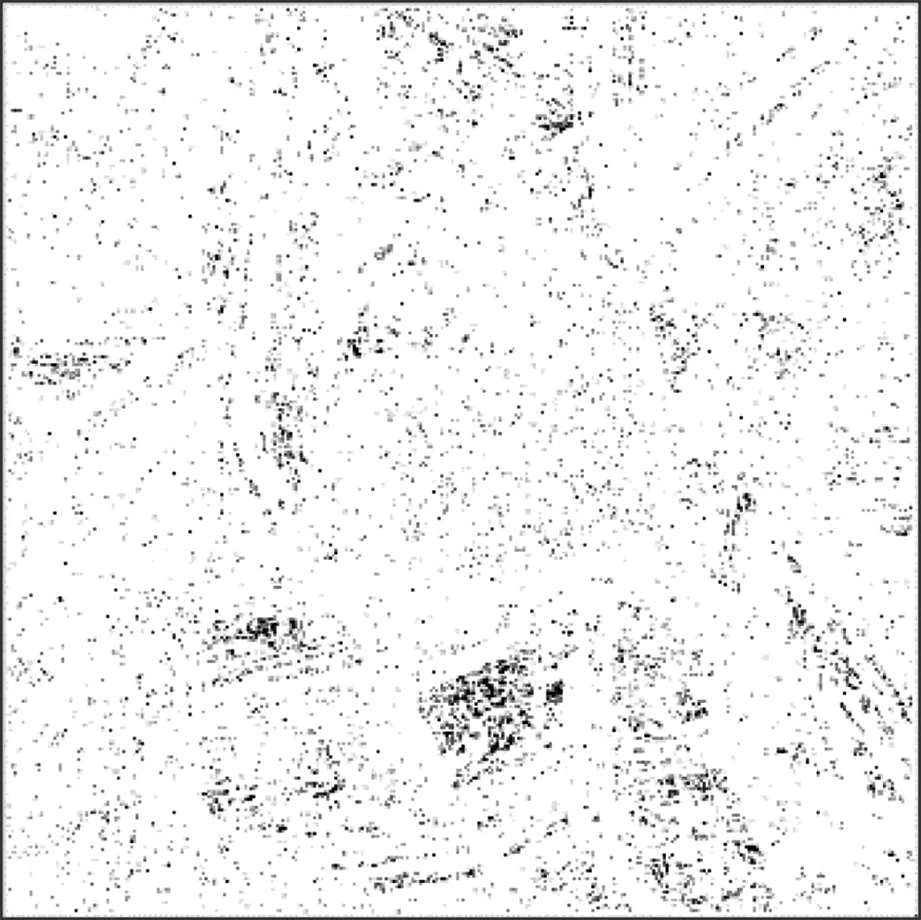
图6 第二级小波分解的图像边缘
选取绝对值相对大的小波系数,对分解的小波图像进行融合,其处理区域为3×3。首先,求取图像中模的极大值,并转换为幅值,寻找各方向最大值点,并将其设置为边缘点;然后,连接图像所有的边缘点,形成图像边缘(见图7a)。在Matlab中,调取Roberts函数,对图4进行边缘提取(见图7b)。
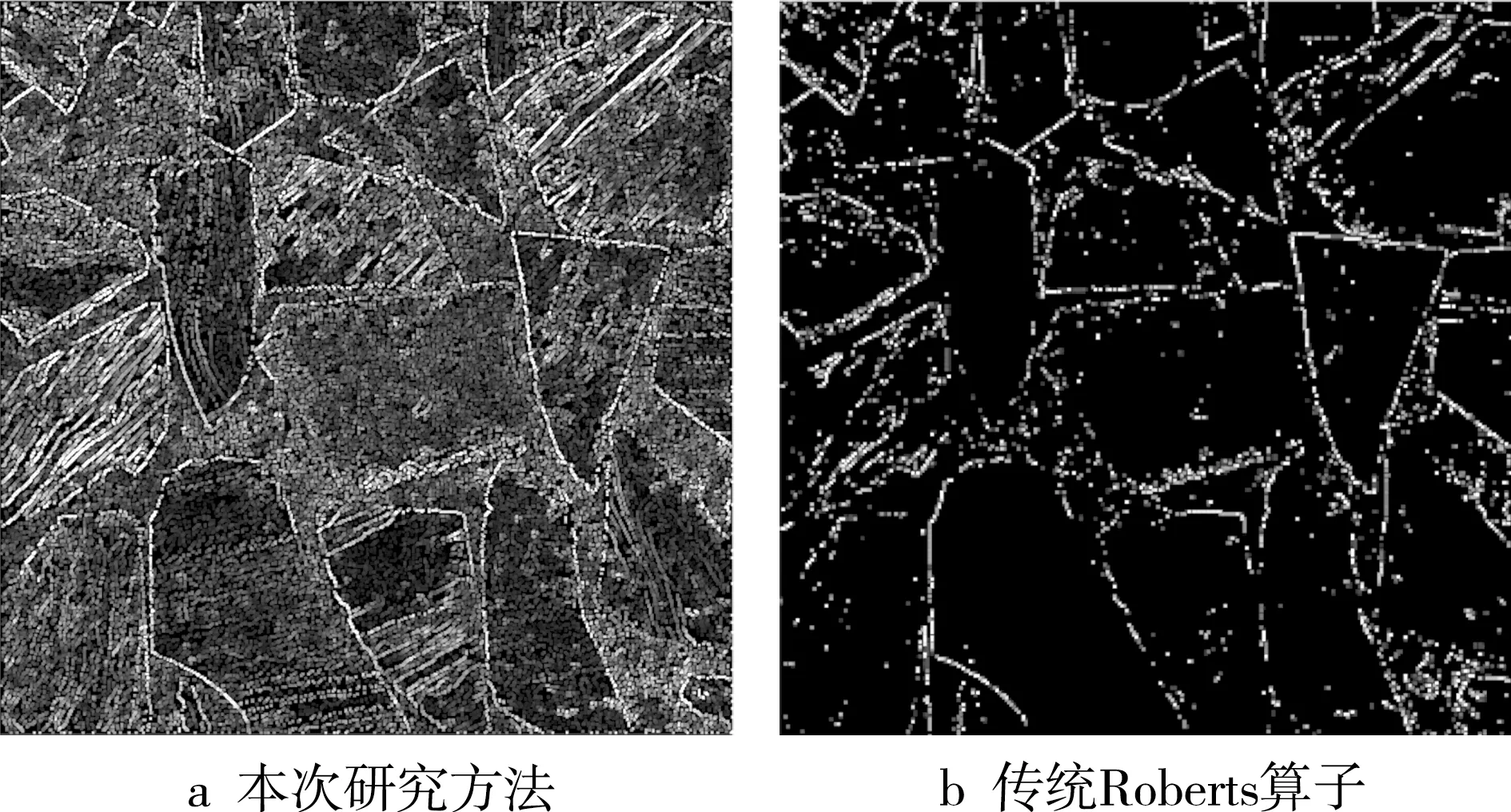
图7 不同方法提取的图像边缘
由图7可知,与传统Roberts算子相比,经过小波处理后得到的图像边缘,拥有更多的细节信息。采用传统Roberts算子提取的图像,地砖样貌缺少一些重要的边缘信息;采用本次研究方法提取的图像边缘几乎连续,能够得到较为清晰的地砖轮廓和纹理,定位更加精确,检测到的边缘信息更加完整。
4.2 边缘提取评价
采用Dice(Dice Coefficient)系数和召回率(Recall)等指标,对图像边缘提取效果进行评价。
Dice系数是一种集合相似度度量函数,通常用于计算两个样本的相似度,计算结果的范围为[0,1]。其计算如式(16)所示:
(16)
式中:|X∩Y|表示集合X与集合Y的交集; |X|和|Y|分别表示元素个数。
分别采用本文次研究的方法和传统Roberts算子,对图像边缘信息进行提取,得到的图像相似度对比,如图8所示。对图像边缘提取效果进行评价,结果如表1所示。表中召回率为判定正确的数据所占比重。

图8 图像边缘提取相似度对比
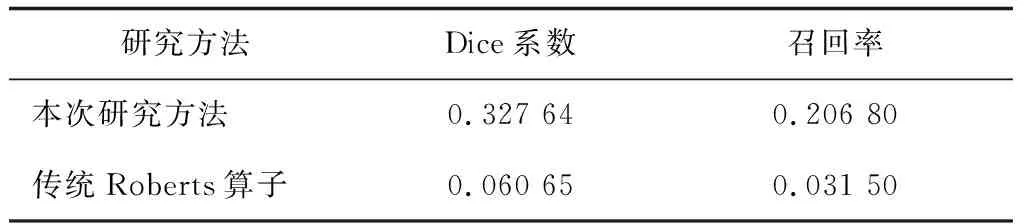
表1 图像边缘提取效果评价
图8中,白色线条为提取的图像与理想图像重合相似的地方,绿色是除去瓷砖之外的纹理点。由图可知,采用本次研究的方法提取的图像边缘,与理想边缘图像更加相似。
由表1可知,传统Roberts算子与本次研究的方法的Dice系数相差5倍左右,召回率相差6倍左右。采用本次研究方法对图像边缘进行提取,效果更好。
5 结 语
本次研究在小波变换基础上,采用Roberts算子对图像边缘进行检测。首先,对图像进行小波分解,利用Roberts算子求各方向的模极大值,从而确定图像的真实边缘;然后,对图像进行融合,得到边缘检测图。研究结果显示,采用本次研究方法对图像边缘进行提取,可获得更多的纹理信息,边缘细节更突出,边缘定位的精确度更高。
