一种基于Canny边缘检测算法的零件缺陷图像处理方法
2022-07-08石冬阳张俊林聂翱翔张雨欣庞迎春
石冬阳 张俊林 杨 欣 聂翱翔 张雨欣 庞迎春
(重庆科技学院 电气工程学院, 重庆 401331)
0 前 言
在零件的加工过程中,由于机器老化、机器自身存在偏差、生产技术等原因,常常导致加工出来的产品质量存在问题[1-2]。不合格的产品直接影响仪器设备的正常使用,因此,零件质量的检测尤其重要。
近年来,随着图像处理与深度学习技术的发展,出现了多种针对零件螺纹缺陷检测的方法,很大程度地提升了零件的产品合格率。文献[3]报道了利用机器视觉皮带开发,实现了对3种螺纹缺陷的检测,但该方法没有考虑图像噪声对检测结果的影响。文献[4]中,首先采用Roberts算法对零件图像进行预处理,然后对螺纹边缘进行特征提取,其不足之处在于,检测的螺纹边缘存在断裂、漏检的现象。文献[5]中,采用机器视觉工件缺陷检测系统对螺纹缺陷进行了定位,但其能够检测的螺纹缺陷类型不全。文献[6]中,提出了局部投影统计法,该方法能够快速有效地去除图像噪声,但能够检测出的螺纹缺陷类型也不全。
1 缺陷检测模型的构建
首先,对零件图像进行灰度化、二值化、锐化等预处理;然后,采用边缘检测、直线检测、图像旋转、垂直投影等方法对零件的螺纹缺陷进行检测。零件螺纹缺陷检测流程如图1所示。

图1 零件螺纹缺陷检测流程图
2 图像预处理
为了使螺纹图像特征更加明显,避免图像噪声的干扰,需要对其进行预处理,以提高螺纹缺陷检测的精度。
2.1 图像灰度化
对图像进行灰度化操作,可以减少运算量。取3个分量的最大值,作为图像灰度化处理的结果,如式(1)所示:
Gray(i,j)=max[R(i,j),G(i,j),B(i,j)]
(1)
式中:Gray(i,j)表示图像灰度值;R(i,j)、G(i,j)、B(i,j)分别表示图像的3个分量。
2.2 图像二值化
目标图像与背景图像的灰度值有较大差异,根据灰度值对其进行区分。将目标图像灰度值标记为 0,将背景图像灰度值标记为1,设F(x,y)为图像中像素点的灰度值,灰度阈值(Th)的变换函数为[7-8]:

(2)
2.3 图像锐化
为了使零件边缘特征更加明显,采用Sobel算法对图像进行锐化,如式(3) — 式(5)所示:
Hx=(z7+2z8+z9)-(z1+2z2+z3)
(3)
Hy=(z3+2z6+z9)-(z1+2z4+z7)
(4)
|▽f|≈|Hx|+|Hy|
(5)
式中:Hx和Hy分别表示像素点横向、纵向梯度近似值;|▽f|表示图像梯度幅值;z1—z9表示原图像与模板矩阵相乘所对应的各像素点。
3 零件螺纹缺陷检测
零件螺纹缺陷检测的步骤主要包括:边缘检测、直线检测、水平旋转、垂直投影等。其中,边缘检测的效果将直接影响缺陷检测的精度,Canny算法具有滤波降噪的结构,并可以通过设定高低阈值,对图像真实和虚假边缘进行有效区分,可避免发生断裂、漏检的现象。
3.1 边缘检测
对目标图像进行边缘检测,可以得到图像的形状和特征,Canny边缘检测算法包括以下4个步骤[9-10]:
(1) 滤波操作。使用高斯滤波器进行滤波操作,从而减轻噪声对边缘检测的影响。对图像进行卷积处理,选用的高斯分布函数为:
(6)
式中:σ表示高斯滤波器的参数。
原图像I(x,y)与高斯分布函数S(x,y)卷积后,得到图像H(x,y):
H(x,y)=S(x,y)×I(x,y)
(7)
(2) 图像梯度幅值与方向的计算。图像梯度幅值可呈现图像像素的变化,梯度方向代表了图像像素强度变化的方向。像素点(i,j)在x、y方向的偏导数wx(i,j)和wy(i,j)分别为:
wx(i,j)=[I(i,j+1)-I(i,j)+
I(i+1,j+1)-I(i+1,j)]/2
(8)
wy(i,j)=[I(i,j)-I(i+1,j)+
I(i,j+1)-I(i+1,j+1)]/2
(9)
此时,像素点(i,j)处的梯度幅值w(i,j)和梯度方向θ(i,j)分别为:
(10)
(11)
(3) 非最大值抑制。非最大值抑制的操作过程是先确定梯度方向的非零点,然后沿该点的方向导数寻找邻近的2个点。若2个邻近点的幅值超过中心点,那么此非零点不属于图像边缘,则令其边缘强度为0。
(4) 双阈值选取和边缘连接。通过设定高、低阈值,可对图像真实和虚假边缘进行有效区分,最终只保留真实有用的边缘信息,可以很好地抑制伪边缘的存在。
3.2 直线检测
在笛卡尔坐标系中,直线的表达式为y=ax+b。其中,a表示直线斜率;b表示该直线在y轴的截距。在极坐标系中,直线的表达式为xcosθ+ysinθ=ρ。其中,ρ表示该直线与原点之间的距离;θ表示该直线法线的切线斜率。根据直线的平移和旋转特征,平行放射线束的投射可由一组平行线的模型来实现。沿着直线xcosθ+ysinθ=ρ的射线,能够得出投射数据中的任何一点。设f(x,y)为平面图上一任意连续函数,Radon变换定位可表示为:
Radon(f(x,y))=λ(ρ,θ)
=∬f(x,y)δ(xcosθ+ysinθ-ρ)dxdy
(12)
式中:λ(ρ,θ)表示Radon变换的结果;δ()表示冲击函数,只有在其变量为0时,才为无穷大值,其积分结果为1。
当x、y的值处于离散状态时,Radon变换定位可表示为:
Radon(f(x,y))=λ(ρ,θ)

(13)
式中:m、n分别表示图像的高度和宽度;x、y、ρ、θ分别表示离散变量。
3.3 图像旋转
对零件图像进行直线检测后,需要对其进行水平旋转。以直线检测结果中若干条直线斜率的平均值作为水平旋转的角度,常用的计算公式如式(14)所示:
(14)
式中:gθ表示水平旋转角度;hi表示直线的斜率;n表示检测直线的数量。
3.4 垂直投影
垂直投影能够反映物体形状变化的规律,是识别物体缺陷的重要方式。正常螺纹与有缺陷螺纹的垂直投影图有所差异,可据此判断螺纹缺陷的位置。
4 仿真验证
4.1 图像预处理结果
通过MatlabR 2018软件分别对正常螺纹、半螺纹、不规则螺纹、无螺纹等4种螺纹零件图像进行预处理,结果如图2所示。经过预处理的图像,边缘特征更加容易提取,噪声影响较低。

图2 螺纹零件图像预处理结果
4.2 缺陷检测
4.2.1 6种边缘检测效果
分别采用Roberts、Sobel、Prewitt、LOG、Canny、数学形态学等6种边缘检测算法,对零件螺纹边缘进行检测,通过MatlabR 2018软件进行仿真模拟,对比不同算法的检测效果。其中,对于Roberts、Sobel、Prewitt等3种算法,其阈值设定为0.050 0,模拟结果如图3 — 图5所示。LOG属于二阶微分算法,其阈值设定为0.055 0,模拟结果如图6所示。对于Canny边缘检测算法,高低阈值分别设定为0.265 6、0.106 3,模拟结果如图7所示。对于数学形态学的边缘检测方法,本次采用3×3模板,模拟结果如图8所示。
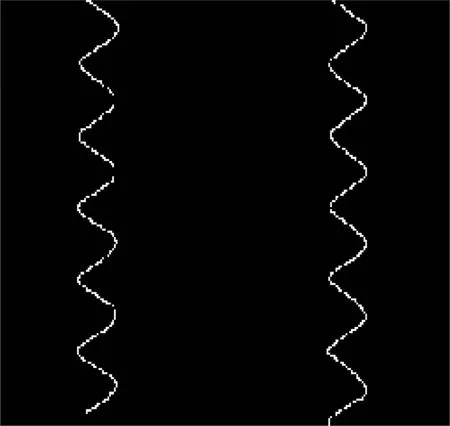
图3 Roberts边缘检测算法模拟结果
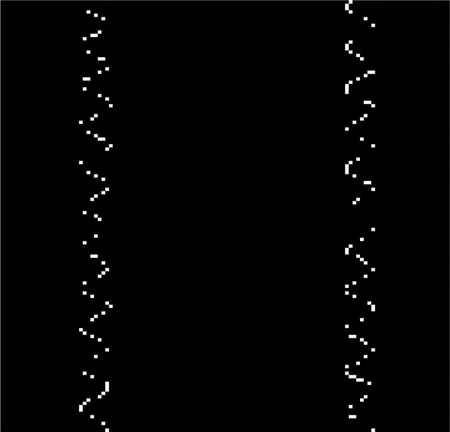
图4 Sobel 边缘检测算法模拟结果

图5 Prewitt边缘检测算法模拟结果

图6 LOG边缘检测算法模拟结果

图7 Canny边缘检测算法模拟结果
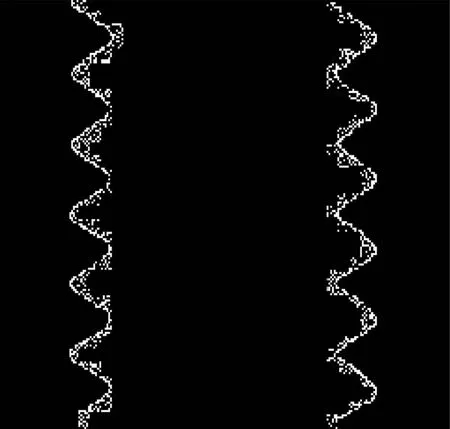
图8 数学形态学边缘检测算法模拟结果
由模拟结果可知,采用Roberts、Prewitt、Sobel检测出的螺纹边缘存在断裂、漏检的现象。其中,Prewitt、Sobel算法的漏检现象较为严重,图像边缘的完整性较差。采用LOG、数学形态学算法检测出的螺纹边缘出现了虚假边缘。比较而言,Canny算法在噪声的抑制、检测边缘的连续性、检测目标的细节等方面都具有明显优势。
4.2.2 Canny算法的检测结果
利用Canny算法对预处理后的图像边缘进行检测,结果如图9所示。正常螺纹零件边缘检测结果呈规律性波动;半螺纹零件部分边缘检测结果呈规律性波动;不规则螺纹零件边缘检测结果呈无规律波动;无螺纹零件边缘检测结果呈直线。
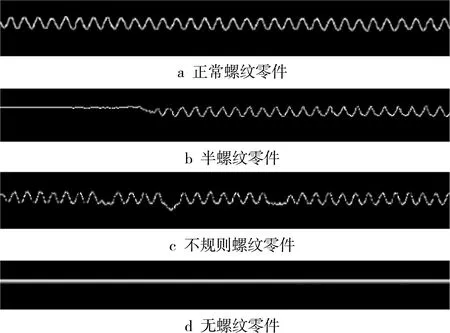
图9 螺纹零件边缘检测结果
4.2.3 直线检测结果
本次研究采用Radon算法对4种螺纹零件进行直线检测,结果如图10所示。4种螺纹零件所在的直线都能被准确地检测出来,与实际情况相一致。这说明Radon算法能够准确检测零件中直线所在位置。

图10 螺纹零件直线检测结果
4.2.4 水平旋转结果
为了使螺纹零件图像处于水平位置,需要对图像进行水平旋转。根据直线检测结果,计算零件所在直线的斜率,取若干条直线斜率的平均值,得到直线旋转的角度,结果如图11所示。
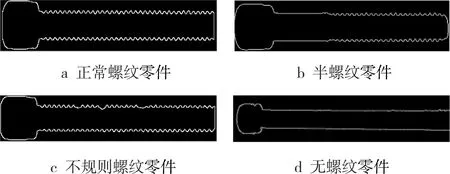
图11 螺纹零件水平旋转结果
4.2.5 垂直投影结果
通过垂直投影可以直观地观察到正常螺纹与缺陷螺纹的区别。对水平旋转后的边缘检测图进行垂直投影,结果如图12所示。正常螺纹零件的垂直投影的波形在一定幅值范围内呈规律性波动,不存在水平波动的现象。存在缺陷的螺纹零件与正常零件的垂直投影图在波形形状、波动幅值上有较大差别,可由此判断零件螺纹缺陷的类型。
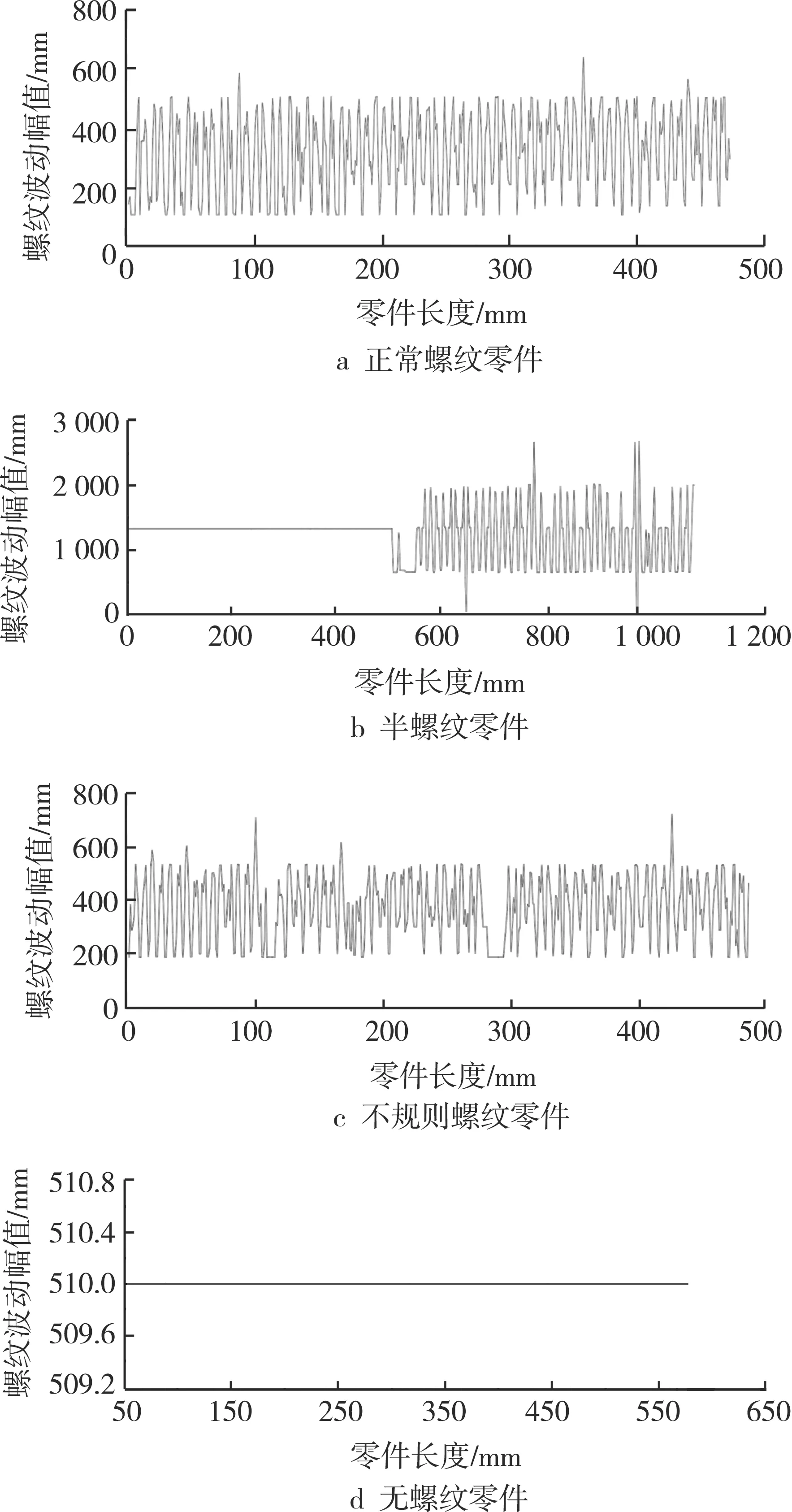
图12 螺纹零件垂直投影结果
5 结 语
本次研究以准确检测出零件上的螺纹缺陷为目的。首先对零件图像进行灰度化、二值化、图像锐化等预处理,使检测目标的边缘特征更加容易提取;然后,利用边缘检测、直线检测、图像旋转和垂直投影等方法对螺纹缺陷进行检测。采用Canny算法可避免检测过程中发生断裂、漏检的现象,能够有效提高螺纹缺陷检测的精度。
