桥式抓斗卸船机电气控制系统研究与优化
2022-07-07王定华王伯鸿
王定华, 王伯鸿
(杭州华新机电工程有限公司, 浙江 杭州 310030)
引言
目前我国港口仍使用较多老旧的卸船机,在卸料时也往往使用人工手动方式,从而造成了小车与抓斗速度控制的不合理,严重影响了卸船效率。为有效改善这一现象,就必须实现桥式抓斗卸船机自动化控制,解决好卸船机在运行过程中所产生的摆动问题,降低卸船机司机的劳动强度,不断提高卸船效率。
1 桥式抓斗卸船机系统结构
1.1 金属结构
桥式抓斗卸船机所包含的基础结构主要有前后拉杆、前后门架、侧撑杆、上门架、侧桁架、机房架、接料斗和支架等[1]。对大部分金属结构来说,所使用的构造为薄壁封闭矩形,利用Q345 合金钢打造而成,在每一个金属结构连接部位处使用了焊接或螺栓连接。
1.2 四卷筒机构
通常情况下,四卷筒机构主要安装在机房内,通过四个滚筒向不同的方向旋转,以此实现抓斗的起升和启闭。当起升电机被开启后,可以充分利用它的减速机所发挥的作用,使两个滚筒同向旋转,以此来有效实现抓斗的降落与升起;当闭电机开启后,利用减速机使两个滚筒同向旋转,以此来有效实现抓斗的张开与闭合;当小车引动机开启时,同时开启二台减速机,那么四个滚筒就会相互构成一对滚筒,然后通过相向或相反的方式进行旋转,以此来完成小车向前或向后运行;当起升、启闭电机与小车引动电机三者之间同时工作时,桥式抓斗就可以有效曲线行走。
1.3 变幅机构
对于变幅机构来说,它需要安装在四卷筒机构后,利用90 kW 功率的交流电机,促使减速机工作,然后通过滚筒的不同方向选装,让钢丝索来回缩放,有效保障前端大梁顺利升降。
1.4 大车运行机构
桥式抓斗卸船机大车运行机构主要是由四组八轮行走小车所构成,且每组小车的行走方式都采用了半驱动,即在八个轮子当中,有四个轮子是从动轮,而另外四个轮子则为驱动轮。整机共由32 个轮子组成,其采用的驱动设备为电机、联轴器、减速器一体,驱动设备驱使每组小车车轮转动,以此带动大车运行。大车运行机构台车组如图1 所示。
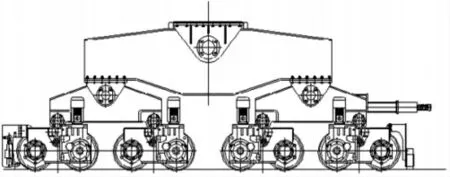
图1 大车运行机构台车组
2 桥式抓斗卸船机控制系统组成部分
2.1 电气控制系统
在电气控制系统结构中,桥式抓斗卸船机电气控制系统主要由四部分组成,即执行层、监控层、控制层与管理层[2]。其中执行层主要是指电动机;控制层主要是由各种各样的控制器所组成;监控层是指图像终端,在正常运行的过程中,通过监控层能够高效实现与控制层之间信息交流,有效实现了控制桥式抓斗卸船机电气系统的目的;对管理层而言,主要指的是管理人员所使用到的计算机,在管理层中,管理者可以先将收集到的信息加以有效管理,然后再运用互联网自身具有的优势,有效实现远程监视和维护,进而让桥式抓斗卸船机电气运行系统正常工作。
2.2 控制系统硬件组成部分
2.2.1 传动装置
该装置在电气控制系统中,是最主要的组成部分,在一般情况下,企业通常都会通过西门电子交流全变频控制系统,来对传动装置实施控制,这样可以更有效地确保将电能逆回电网中,使空斗下方的能量得到充分发挥。
2.2.2 控制装置
该装置的核心内容是PLC,其在使用的过程中具有集成程度高、操作灵活以及可靠性好的特点,这样能够有效保障在控制桥式抓斗卸船机时,减少一些不必要的复杂过程。
2.2.3 监控装置
对于监控装置来说,其主要目的就是监控桥式抓斗卸船机在运行过程中的状态,在监控过程中,其主要是由工业触摸屏以及管理系统两个部分所组成。
2.2.4 变频器
变频器分为两种类型,一种为直接式,另外一种为间接式,现阶段使用最广泛的变频器类型为间接式。可控硅在使用过程中,往往会用在一些功率比较大的变频器中,同时在每一个变频器当中,还设有了专门的可调频率装置,这样能够有效确保在使用的过程中可在移动范围之内进行调整频率,以此来更好地对电机转数进行控制。
3 优化桥式抓斗卸船机控制系统的有效措施
3.1 对控制系统进行改造
在桥式抓斗卸船机控制系统运行过程中,具有运行效率较高的优势,采用科学的控制抓斗技术与卸船自动化技术,有效减少了机械运行过程对桥式抓斗卸船机所造成的一些不良冲击力,让一些机械物理磨损得到了有效解决,同时维修的次数与时间也得到了有效缓解,全面提升了机械工作效率。
在配置ABB 生产的ACS880 多传动系统时,需要遵循好直流母线原则,这样能够有效实现利用一个电源与一个制动装置对多台变频器进行控制。此外,在选择系统供电装置时,可以选择前端IGBT 或者二极管,这样能够让多台电动机在驱动的情况下,更好地满足多传动应用需求。在设计过程中,选择多个元件以及直流总线的方式,这是因为电网在获取电能时,并不是每一个元件都能够达到理想的要求,比如小车系统在移动阶段,开启闭合功能时所需要用到的电能,都是由小车自身所提供的。通过这样的设计方式,大大节省了整流器的空间,同时整流器的尺寸也变得越来越小,在很大程度上有效降低了检修的时间与成本,提高了维修效率。
在最终的改进方案中选用PM866CPU 模块,模块在安装时选择了S 系列,其原因是因为该系列具有一定的抗振性能。在节省小车抓斗运行时间方面,所使用的最基础方法是根据一些相关的参数进行计算小车与抓斗的启动时间与位置,在这个过程中,相关工作人员需要保障这一系列操作在合理的安全范围内,使电气控制系统合理地去控制小车速度,以此来有效抑制抓斗的摆动,这样不仅有效提升桥式抓斗卸船机在工作过程中的效率,还在很大程度上降低了桥式抓斗卸船机对机械设备自身的冲击力。
3.2 采用远程操作协同系统
随着我国科技的不断进步与发展,移动互联网技术也得到了全面的发展,仅仅依靠一张4G 网卡就可以实现对单台桥式抓斗卸船机的控制。如果卸船机在正常运行的过程中,突然出现了故障现象,ABB 工程师便可以不再受时间与地点的限制,只要选择有网络的地方,利用一部手机或者电脑为现场提供高质量指导。在这个过程中,为了有效避免桥式抓斗卸船机受到病毒的攻击,ABB 工程师在指导的过程中,需要将自己的网卡插入CMS,当故障得到有效解决后,用户要立即将网卡拔出,进而让桥式抓斗卸船机尽早与网络脱离。除此之外,在应用远程操作协同系统时,还需要不断升级24 h 全天值班系统,做到对监控系统进行实时保护。
3.3 模块安装
在模块安装环节中,首先需要将使用周期较长,且位于PLC 柜内的西门子模块进行拆除,对拆除完成的电缆接头,要做到妥善保管。然后严格按照改造之后的图纸,遵循控制电缆连接的原则,安装ABBPLC模块。最后,在电气房主站PLC 与外部分站PLC 之间,还需要使用ProfibusDP 通信。
4 结语
在港口散货船接卸时,为了能够确保该设备能够正常运行,保障电气控制系统的稳定性。本文主要首先阐述了桥式抓斗卸船机系统结构,然后对桥式抓斗卸船机控制系统组成部分进行了分析,最后研究了优化桥式抓斗卸船机控制系统的有效措施,确保桥式抓斗卸船机得以正常运行,对我国桥式抓斗卸船机控制系统的优化改造具有借鉴意义。
