增升增效倾转翼农用植保无人机的设计与仿真
2022-07-07刘知杰林尤鑫李继宇
吕 佳,刘知杰,林尤鑫,魏 玉,李继宇
(1 华南农业大学 工程学院, 广东 广州 510642; 2 华南农业大学 电子工程学院, 广东 广州 510642)
应用农业航空植保技术对提高中国农作物病虫害防治机械化水平、实行统防统治的专业化服务、提高农业资源的利用率、增强农业抗风险能力、保障国家粮食安全和生态安全、实现农业可持续发展具有十分重要的意义[1]。
目前植保无人机以电动多旋翼和直升机为主要机型,相比作为通用航空主力机型的固定翼机型,旋翼机型的优势包括能在农田地头复杂环境中垂直起降和悬停、高度可调、雾流上下穿透力强[2],保证了植保低速巡航及悬停喷施的作业效果。旋翼机型劣势则是受限于飞行原理,相同条件下作业能耗较高,航时较短,难以保证植保喷施作业大负载、长航时的作业效率。而当前农业航空技术的发展对植保无人机提出了更高的性能要求,如何既能保障低速巡航带来的作业效果,又能具备高升力长航时的作业效率,是植保无人机未来需要解决的重要问题之一。
飞行机理表明,固定翼机翼在水平方向上与空气互相作用产生升力,旋翼机的旋翼在垂直方向上与空气互相作用产生升力,两者分别是保证无人机高速和低速作业的特征结构。如果在一架无人机上同时安装机翼与旋翼,在高速作业阶段使用机翼,低速作业阶段使用旋翼,并且在低速、高速转换阶段实现旋翼的倾转,则可以将二者功能有效融合在一起,有望满足未来植保无人机的发展要求。高速阶段水平飞行时,旋翼由垂直方向状态转变为水平方向状态,根据飞行原理,此时整机的升力源自于固定翼与空气的相互作用,水平方向时旋翼的输出功率仅仅用以支持前向飞行,无人机的载重功率则完全来自于机翼对空气做功。故相比低速阶段飞行,旋翼的输出功率大大降低,整机的续航能力得到原理上的提升。
固定机翼带来的升力增加了原多旋翼的载重能力,提高了单次作业能力,起到了植保无人机增加载重的增升效果[3]。倾转功能的实现使得无人机倾转前可使用多旋翼直接起飞,不需要跑道,倾转后可使用固定翼飞行,速度快,起到了提高作业效率的增速效果。本文所设计的这款增升增速倾转翼农用植保无人机其结构具有更良好的悬停和低速巡航性能,可有效降低多旋翼农用植保无人机在农田飞防过程中的能量消耗,提高农用无人机在高荷载作业情况下的飞行稳定性和续航能力[4]。
国外对于倾转旋翼飞行器的研究起步较早[5]。1955年,美国研发世界第一架 XV-3倾转旋翼机,并在试验中完成对倾转旋翼机垂直起降的功能检测[6],并研制出V-22 倾转旋翼机,其结构特点为在机翼两端安装可倾转的旋翼发动机舱。日本在串列式机翼布局基础上加装了4个具有倾转功能的发动机舱,此结构在倾转旋翼机垂直悬停时能更好地稳定和控制机体姿态[7]。马里兰大学航空工程系的Radhakrishnan 等[8]制作了四倾转旋翼机的模型UM QTR,并主要研究四倾转旋翼机地面效应的空气动力学问题。但是上述机型均未从植保作业角度进行有效设计,难以满足农业航空无人机机型的使用需求[9]。
国内的许多高校和科研机构也对倾转旋翼机的飞行性能等方面开展了大量的研究,获得了丰富的研究成果。程尚[10]建立了倾转旋翼飞行器非线性模型,在MATLAB/Simulink 仿真环境中计算倾转旋翼机的非线性仿真模型,借助于MATLAB相关指令进行配平计算。董凌华[11]研究了旋翼倾转过程中对机翼产生的气弹耦合现象,开发了适用于机翼螺旋桨气弹动力学的软件,填补了我国在这方面研究的空缺。陈天予[12]利用Fluent软件计算倾转旋翼机在悬停、前飞、过渡阶段的工作状态机翼所受到的气动干扰特性并建立了计算倾转旋翼的气动模型。文程祥[13]研究四旋翼和固定翼的气动耦合特性,采用CFD 仿真方法分析螺旋桨转速对机翼的升阻力系数的影响,得到了螺旋桨转速与机翼升力之间的对应关系。沙虹伟[14]建立了倾转旋翼机全量飞行动力学的数学模型。赵广[15]使用动量源模型替代螺旋桨,通过时间平均的方法计算旋翼桨叶周围空气的周期性扰动,螺旋桨气流转化为“准定常”流动,用动量源模型计算螺旋桨气流的方法能降低工作量,减少计算过程,对于研究螺旋桨气流对机翼的气动干扰和机翼的受力变化有重要帮助。
虽然国内外的研究对倾转旋翼机的升力、阻力等空气动力学性能进行了大量分析和优化[16],也获得了较好的研究成果,但仅局限于对倾转旋翼飞行器的有限优化,并没有提出新型的植保作业无人机结构,没有摆脱此类飞行器的自身局限性。因此,必须针对植保无人机同时需求低速巡航与高速作业的特点,改进基础结构使其更适合大田作业,设计出一种具有良好的悬停和高、低速巡航性能的植保无人机。
1 倾转翼植保无人机总体设计
本文设计的倾转植保无人机以旋翼机体为主体,将固定翼的机翼安装在旋翼机两端,且机翼具有倾转功能和可拆卸功能。
1.1 倾转翼植保无人机的结构构型
该植保无人机的主体形状由四旋翼和机翼组成。四旋翼的构型为普通旋翼机构型,呈X 字交叉布局形式,其机体结构包括中心架、起落架、支撑臂[17],如图1所示。倾转机构设在中心架内部与四旋翼机体固定,其内部通过步进电机驱动倾转轴旋转来控制机翼的倾转,如图2所示。机翼安装方式为通过孔轴配合形式嵌入安装,卡扣固定。
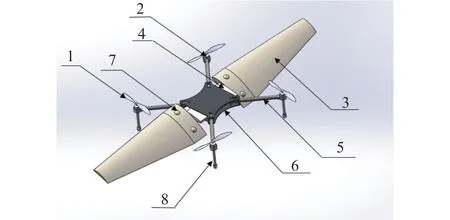
图1 植保无人机的结构构型示意图Fig. 1 Structural configuration diagram of plant protection UAV

图2 植保无人机倾转机翼示意图Fig. 2 The diagram of tilting wing of plant protection UAV
1.2 植保无人机多旋翼设计
多旋翼主要由机体部分、动力部分、控制部分构成。机体部分为多旋翼的机身构型;动力部分包括螺旋桨、电动机、电子调速器、电源等;控制部分是飞行控制系统和传感器部分。多旋翼的设计需要在作业方式、功能需求和性能指标之间进行综合权衡,在给定的约束条件下获得最优设计方案[18]。
结合旋翼机的稳定性和旋翼对机翼的气动干扰,为保证机体的稳定性和满足飞机的升力同时减少对机翼的气流干扰,飞机采用四旋翼设计,使用X型布局结构,轴距800 mm,起飞质量1.5~2.0 kg,空速不超过15 m/s,续航时间大于10 min,电机定子直径22 mm,定子高度16 mm,KV值取1 250,螺旋桨直径25.4 cm、螺距11.938 cm,单电机最大拉力9 N。此结构有利于在机体左、右两端安装机翼,减少旋翼气流对机翼的影响[19]。
植保无人机的动力系统主要有电池、电子调速器,电机和螺旋桨等部分。
为避免旋翼间的尾迹雾滴区的诱导气流相互靠近使得螺旋桨叶的来流合速度降低,桨叶上下表面压差减少,旋翼和机翼之间形成的“喷泉效应”降低机翼上下表面压差,造成升力损失,降低作业效率[20]。同时为了降低旋翼间产生的气流干扰,旋翼间距应大于2.9倍旋翼半径[21],所以选择了1045型号螺旋桨。
倾转翼植保无人机使用无刷直流电机,需确定电机的尺寸型号和KV值。根据螺旋桨型号和机架参数选择了2216型无刷电机。同一型号的电机具有不同的KV值和扭矩。根据朗宇的厂家资料和多旋翼电机的拉力要求及考虑电机的效率,选取KV值为1 250的电机。
1.3 增升装置机翼的设计
1.3.1 翼型选择与参数分析 翼型是机翼形状的基础,对机翼的飞行性能有着重要的影响。同时考虑植保无人机的作业要求,倾转翼增升机翼可在翼型库中选取。MH114型号机翼属于固定翼设计的常用经典翼型,具有低雷诺数与高升力,适用于低速飞行状态,依据飞行设计手册资料,该型号满足植保无人机飞行速度范围与升力要求。
本文选用的翼型数据和详细参数由Profili翼型软件获得[22]。机翼如图3所示。

图3 MH114翼型图Fig. 3 Airfoil diagram of MH114
翼型的气动参数分析需要确定雷诺数(Re)和空速的对应关系。雷诺数公式表示为:

式中: ρ为空气密度,kg/m3;va为空速,m/s;d为机翼弦长,m; µ为动力黏度,Pa·s; ν 为运动黏度,m2/s。d为固定值,在低速条件下,ρ、ν为常数,雷诺数和空速成对应的线性关系,取d为0.20 m,空速和对应雷诺数见表1。
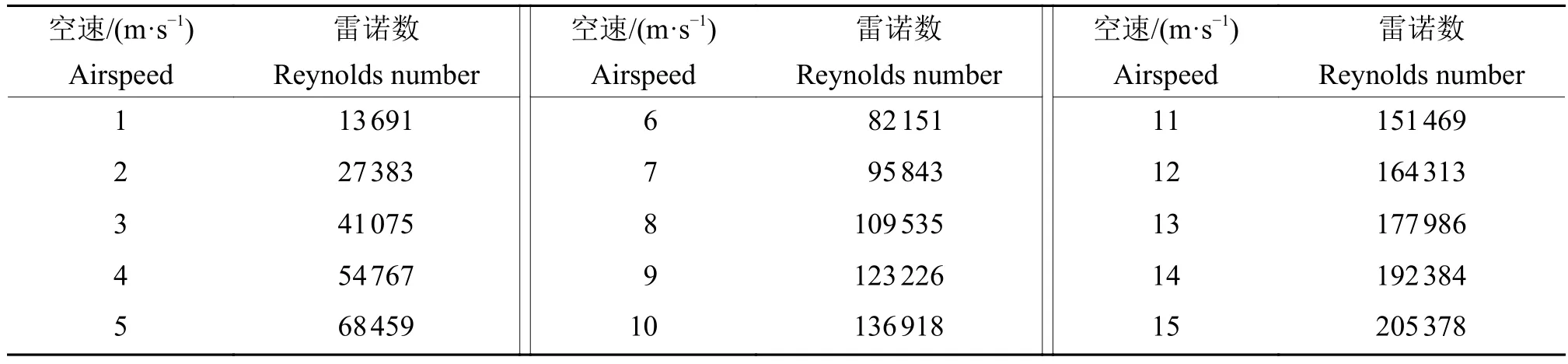
表1 空速和雷诺数对应表Table 1 Corresponding table of airspeed and Reynolds number
由图4可知,升力系数(Cl)随着雷诺数增加而增加,雷诺数小于41 000,对应空速小于3 m/s时,喷洒作业效果较好,Cl在负迎角出现负值;雷诺数大于96 000,对应空速大于7 m/s时,喷洒作业效果下降,但效率上升,最大Cl在1.0以上。当雷诺数大于137 000,对应空速大于10 m/s,取得最大喷洒作业效率,在相同的迎角下,Cl随着空速增加的变化不明显。植保无人机的升力增加意味着可携带负载质量的提升,而且引起喷洒作业效果和效率的变化,但同时又必须考虑增升装置导致的阻力增加。
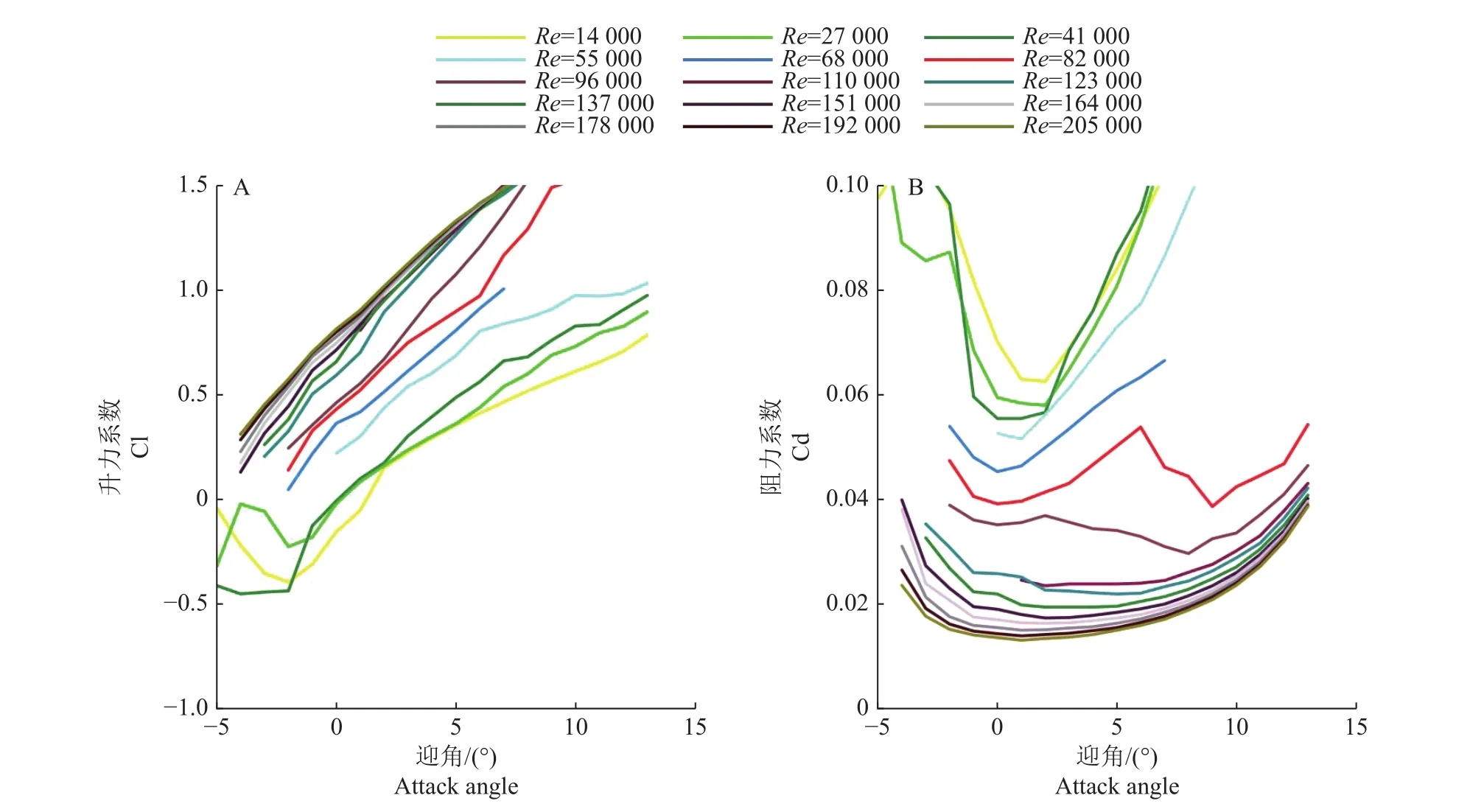
图4 不同雷诺数下的升力系数(Cl)和阻力系数(Cd)与迎角关系Fig. 4 Relationship between the lift coefficient (Cl),drag coefficient (Cd) and the attack angle under different Reynolds number
阻力系数(Cd)随着雷诺数增加而减小,雷诺数小于55 000,对应空速小于5 m/s时,Cd随着迎角的增加变化剧烈,此时喷洒作业效果适合大田作物;当雷诺数大于137 000,对应空速大于10 m/s,Cd随着迎角增加变化较为缓和,喷洒作业效率达到最佳;在相同的雷诺数下,Cd随迎角的增加呈二次分布,迎角为0°时,Cd最小。
由图5可知,在雷诺数小于55 000,对应空速小于5 m/s,升阻比较低,且随迎角变化不明显;在雷诺数小于137 000,对应空速小于10 m/s,最大升阻比的迎角有差别;而雷诺数大于137 000,最大升阻比的迎角稳定在5°。扭矩系数(Cm)随迎角变化不明显,且大部分都为负值。负值表示机翼会产生低头力矩,同时也会影响植保无人机的喷洒作业质量。随着雷诺数的增加,Cm降低,低头力矩增加。而在迎角为10°,不同雷诺数下的Cm都稳定在-0.14范围,喷洒作业效果得到一定程度的保障。
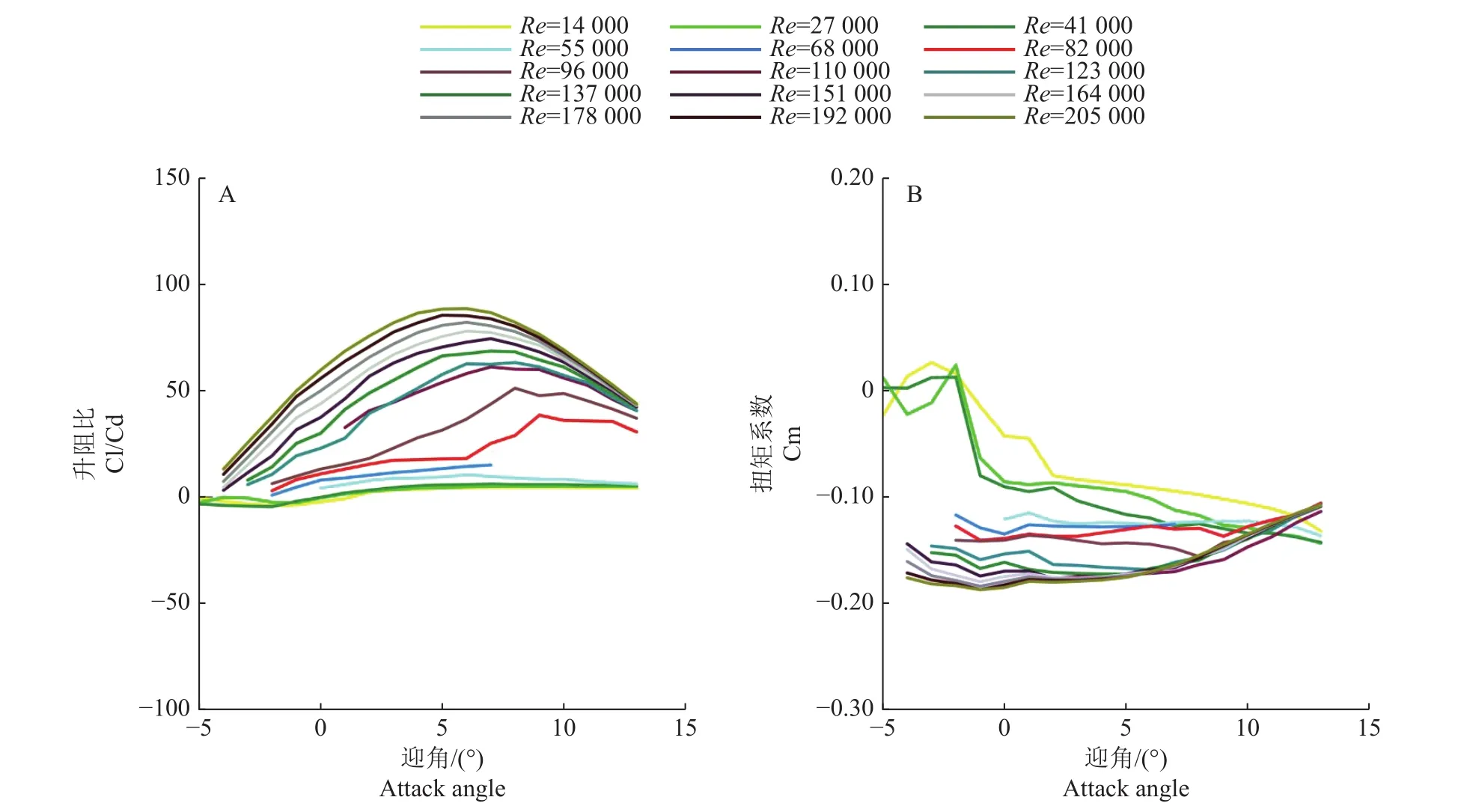
图5 不同雷诺数下的升阻比(Cl/Cd)和扭矩系数(Cm)与迎角关系Fig. 5 Relationship between lift drag ratio (Cl/Cd), torque coefficient (Cm) and attack angle under different Reynolds number
1.3.2 植保无人机机翼的几何参数选择 根据翼型的参数分析,综合不同巡航速度下的较大升阻比值的迎角,选取5° 迎角为机翼安装角。
机翼根梢比(η)为机翼翼根弦长和翼梢弦长的比值,当η为2.2时,机翼翼梢处的诱导阻力最小[23]。根据四旋翼的结构,选取机翼翼根弦长为25 cm,则翼梢弦长为11 cm。
机翼在为机体提供升力前必须先克服自身重力,因此需要按照最小空速计算机翼面积(S)。机翼增升装置质量为0.3 kg,升力系数由Profile计算得出,取5°迎角下升力系数的数值,密度 (ρ )取1.225㎏/m3。S的计算公式为:

式中:m为机翼增升装置质量,kg;g为重力加速度,9.8 m/s2。
得到翼面积后,根据翼根和翼梢弦长可计算出机翼展长(b):

计算结果如表2所示。
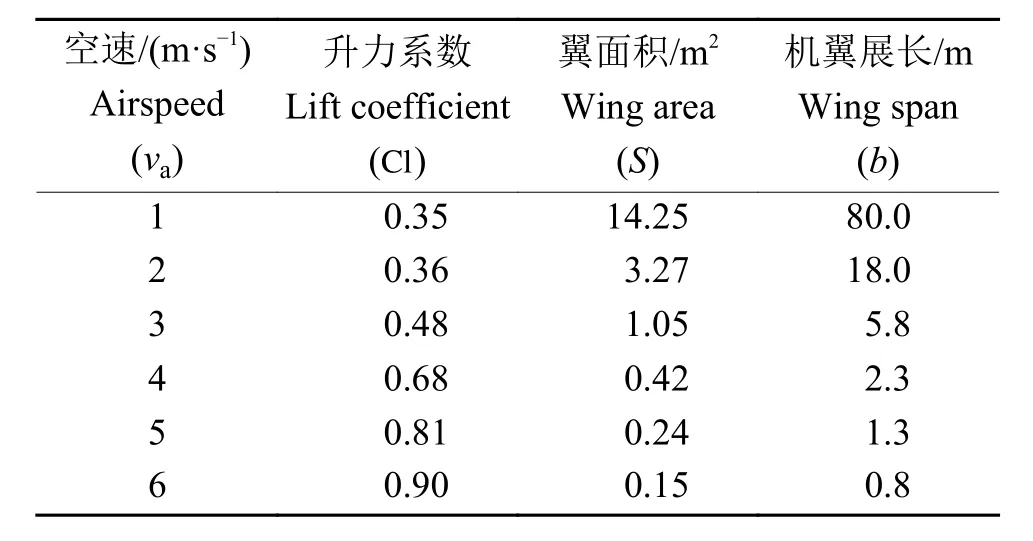
表2 翼面积和机翼展长计算数据Table 2 Calculation data of wing area and span
根据四旋翼的总体尺寸,综合经验和机翼材料的质量,选取5 m/s空速下的机翼展长。由于四旋翼产生的气流除了影响雾滴的喷施效果外,该雾滴气流同时会作用到机翼上,进而影响植保机的升力效率,增加固定翼展长,机翼的弦长与宽度比值变大,飞机的升阻比变高,进而达到提高升力效率的效果。减小雾滴气流对机翼的不利影响,选取机翼展长(b)为1.4 m。进而分析,一方面旋翼雾滴气流作用在固定翼机翼会影响整机升力效率;另一方面,当整机处于低速飞行时,固定翼机翼给整机带来较大惯性,有利于机体的稳定飞行。在发生较大侧风的情况下,通过调整固定翼的副翼舵面,能够更好地维持机体姿态稳定。机翼基本设计参数如下:展弦比为5.7,机翼展长1.2 m,翼载荷60 g/dm2,翼根弦长0.25 m,翼尖弦长0.18 m。
2 倾转翼植保无人机的气动仿真分析
2.1 模型网格划分与计算参数的设置
本文使用Fluent软件进行流体仿真[24]。由于几何模型为左右对称模型,本文只对其中半边模型进行仿真。为了避免机体的缝隙对网格质量的影响,本文对机器模型进行简化,将多余的结构省略,只保留螺旋桨和机翼结构。对简化后的模型绘制流场域,本模型有2个计算域:远场域和旋转域。旋转域的直径设为螺旋桨直径的1.1倍,远场域的体积设为模型的50倍。将简化后的模型导入Mesh 网格划分软件中进行网格划分。
远场域体划分网格设置为BOI 网格划分方法,该方法可以将远场域网格向内部逐渐加密。旋转域网格尺寸设为5 mm。本模型需要模拟机翼表面流域流动情况,对于机翼表面需要设置边界层。边界层的层数设为10层,总厚度为5 mm。
本文采用 Spalart-Allmaras 湍流模型。为取得作业效果与作业效率的平衡,倾转翼植保无人机模拟空速在5~15 m/s 之间,速度方向为垂直入口边界。为了更准确地计算流场的压力变化,压力出口边界的操作压力设置为101 325 Pa。壁面边界条件采用标准壁面函数处理,壁面类型为无滑移壁面。流体材料为常温下的空气,相关参数为:密度为1.225 kg/m3,动力黏度为 1 . 789 4×10-5Pa·s,其他的保持默认值。
本次仿真包含螺旋桨流场旋转区域和机翼外流场非旋转区域。对机翼的流场域保持默认值,设置螺旋桨旋转域为MRF 模型。
算例采用速度与压力耦合方法,选择SIMPLE算法;梯度项差分方法采用Green-Gauss cell Based方法;压力项差分方法采用Standard ;动量项、湍动能项、湍流耗散项、能量项等设置为一阶格式计算,计算收敛后换成二阶格式。
2.2 机翼孤立模型的气动分析
使用Fluent软件进行气动分析,在迎角分别为0°、2°、4°、6°、8°时,空速为 5、7、9、11、13 和 15 m/s时,模拟机翼的升力系数和阻力系数。仿真结果得到气动数据如表3、表4所示。
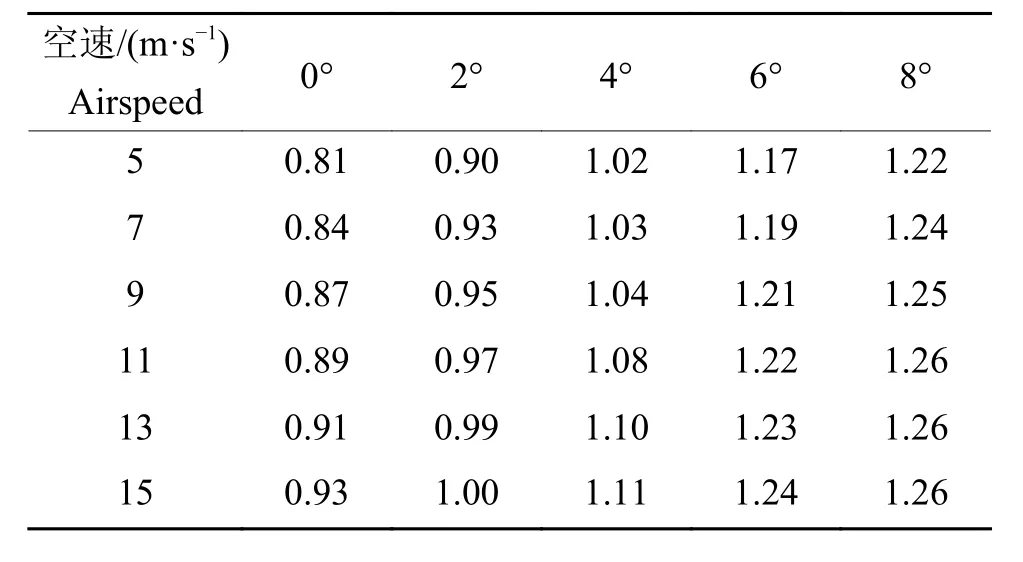
表3 不同空速、迎角下的升力系数Table 3 Lift coefficient at different airspeed and attack angle
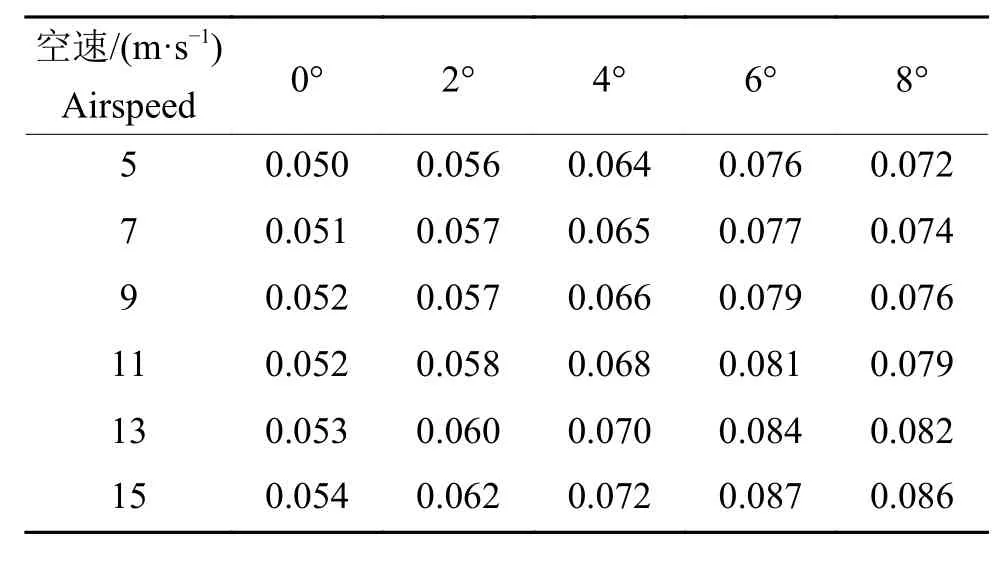
表4 不同空速、迎角下的阻力系数Table 4 Drag coefficient at different airspeed and attack angle
从表3可知,升力系数与迎角和空速均呈现出正相关,其中从4°到6°变化时迎角的影响较为强烈,此时喷洒作业效率会得到显著提升。由表4可知,阻力系数随着空速的增加而增加,且迎角越大,空速的影响越明显,对应作业效率减小。
2.3 螺旋桨与机翼组合模型的气动分析
在机翼气动性能的基础上加入了螺旋桨模型构建整个倾转翼结构进行仿真,模拟螺旋桨产生的气流与机翼前飞方向的气流耦合情况下对机翼的气动性能造成的影响。由于螺旋桨中轴线与机体相固定,跟随机体姿态变化,故在机翼迎角为0°,螺旋桨转速为8 000 r/min,螺旋桨前倾角分别为10°、20°、30°和 40°,空速为 5、7、9、11、13 和 15 m/s时,模拟机翼的升力系数和阻力系数。所得相关气动数据如表5和表6所示。

表5 不同空速、螺旋桨前倾角下的升力系数Table 5 Lift coefficient at different airspeed and propeller tilt angle
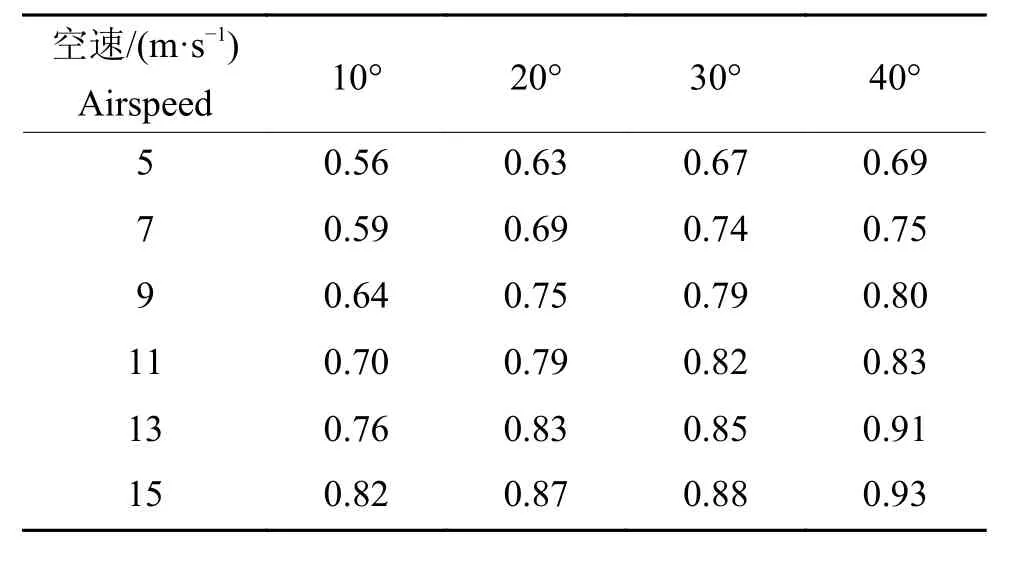
表6 不同空速、螺旋桨前倾角下的阻力系数Table 6 Drag coefficient at different airspeed and propeller tilt angle
将获得的不同空速、螺旋桨前倾角下升力系数、阻力系数的数据整理,同时以表3中分析机翼孤立状态下、0°迎角时的升力系数的数据作为原始值。由表5可知,螺旋桨的气流扰动会导致机翼损失部分升力,升力的损失会随着前倾角和空速的增大而减少,此时作业效率有所减弱。综合分析可知,螺旋桨和机翼组合状态下机翼的升力系数都比孤立状态下机翼的升力系数要小。
以表4中分析机翼孤立状态下、0°迎角时的阻力系数的数据作为原始值。由表6可知,前倾角阻力系数曲线几乎与原始值重合,螺旋桨对机翼的来流阻力影响较小,空速和前倾角的变化对阻力系数的影响不明显,几乎不影响植保机的作业效率。
2.4 作业效率优化分析
为提高作业效率,加大机翼升力,满足设计要求,需要增大机翼迎角以提升机翼的升力系数。根据图4可知,为克服机翼的自身重力,需改变迎角使机翼的升力系数接近0.81。
螺旋桨前倾角的变化对机翼的升力系数影响较大,为了保持螺旋桨在前倾过渡过程中机翼升力的稳定性,需要确定螺旋桨前倾角和迎角的关系,由控制系统动态调整机翼迎角使其升力系数稳定在0.81左右。
本次仿真计算机翼在空速为5 m/s,螺旋桨转速为8 000 r/min,螺旋桨前倾角分别为5°、10°、15°、20°、25°和 30°时,机翼迎角为 1°、2°、3°、4°、5°时机翼的升力系数。在计算得到在同一前倾角下升力系数接近0.81时即可停止计算。计算数据结果如表7所示。
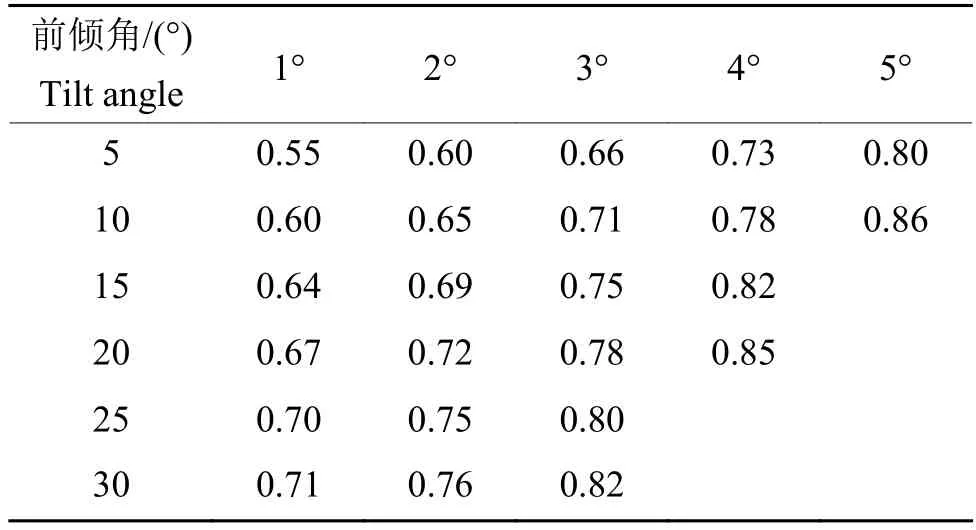
表7 螺旋桨前倾角与迎角对应升力系数Table 7 Propeller tilt angle and attack angle correspond to lift coefficient
根据升力系数接近0.81时的前倾角和迎角的数据,拟合得到的关系公式为:

在5 m/s的空速下,迎角和前倾角的关系几乎呈线性分布。速度的增加会降低螺旋桨诱导机翼来流偏转的作用,线性关系公式的斜率会逐渐降低,使得整体植保无人机的作业效率得到提升。
3 结论
1)从提升多旋翼的续航能力的意向出发,本文提出了一种具有多旋翼和固定翼优点的、适用于低速巡航的新型倾转翼植保无人机。对该模型进行了总体设计、结构分析和气动仿真。运用 Profili 软件和机翼升力公式初步计算在低速下机翼产生的升力,验证了机翼作为增升装置提高续航能力的可行性。
2)利用Fluent 软件模拟倾转翼植保无人机螺旋桨和机翼的耦合流场,在充分考虑田间实际作业速度条件下,分析喷洒作业过程中倾转螺旋桨对机翼升力的干扰特性。仿真发现升力系数与迎角、空速均呈正相关,其中,从4°到6°变化时迎角的影响较为强烈,此时喷洒作业效率会得到显著提升。
3)为提高作业效率,加大机翼升力,运用组合法找到升力系数为0.81时迎角对应5°~30°前倾角,拟合各个数据点得到迎角对应前倾角的关系公式。仿真结果得出在5 m/s的空速下,迎角和前倾角的关系几乎呈线性分布,使得整体植保无人机的作业效率得到提升。该结论为今后设计植保无人机的机翼倾转控制系统提供了一定的参考。