基于计算机视觉算法的车道线检测法研究
2022-07-07何历怀
何历怀
(铜仁职业技术学院 贵州省铜仁市 554300)
车道线检测在驾驶员辅助系统中起着至关重要的作用,对避免车辆在弯道条件中转弯时超速,减少变道和车道占用的违规现象具有积极意义。因此,有必要对车道线检测法进行深度研究。基于计算机视觉算法的车道线检测法综合应用了HLS阈值和sobel阈值算法识别二值图像中的车道线,能够有效区分透视变换图像中的车道线,并完成车道完整路径和曲线方向的计算。据此,应用直线曲线模型建立弯道车道线检测法,并对该检测法进行调整与优化,以有效检测道路的车道边缘、车道曲率半径及其与中心的距离。以期为发挥车道线检测作用,切实减少交通事故提供必要参考和借鉴。
1 基于直线曲线模型的车道线检测
直线曲线模型的应用可以有效将直线模型与曲线模型进行融合,对提高车道线检测实效具有积极意义。应用直线曲线模型建立弯道车道线检测法,首先要在输入的图像中提取出ROI。其次,应用霍夫变换法得出车道的直线区域,并应用最小二乘曲线拟合法得到车道的曲线区域。
1.1 ROI的提取
在提取ROI过程中,首先要对输入的图像进行二值化处理。图像二值化(Image Binarization)是将图像上的像素点的灰度值设置为0或255,即将图像呈现出明显黑白效果的过程。其次,在完成图像二值化处理后,应将每一行的道路图像输入系统,并对相邻2行的像素积累差值进行计算。相邻2行的计算标准是对当前行和前一行进行减法计算得出的。最后,对差值进行外向搜索,确定车道线的水平线位置,最终提取出ROI。
1.2 直线区域与曲线区域的划分
基于直线曲线模型的线性结构由直线曲面的陆线体系发起的。应用此系统方法对车道线的直线区域和曲线区域进行划分,做出了2个近似。第1个近似是直线与近场匹配并应用于车道线检测;第2个近似是曲线区域被视为检测系统的远场。即在近视场的车道被认为是直线,在远视场的车道被近似为弯曲区域。
1.3 直线模型构建
基于直线区域与曲线区域的划分分析,将区域近场中的车道视为直线,直线模型的数学方程表示为:

式中,b表示直线在y轴上的截距;k表示斜率。
基于此,应用霍夫变换法求解直线模型。霍夫变换参数方程表示为:

式中,P表示直线到原点的垂直距离;θ表示x轴到直线垂线的角度,取值范围为-90°~90°。
车道位于车辆的两侧,通过霍夫变换计算,可以得到与线性模型方程相关联的右车道斜率值、左车道斜率值。
得出k=-1/tanh,b=q/sinh,并可以得到线性模型方程的参数。
1.4 曲线模型构建
曲线模型的构建采用最小二乘曲线拟合方法。应用该方法的主要目标在于将真实值误差和拟合值误差控制在最小范围内,以满足数据点要求,提高模型应用的精准性。
1.5 直线模型与曲线模型的切换
在直线模型与曲线模型切换过程中,通过求解检测直线与第二车道线的差值的残差值确定和设置阈值。当误差值大于设定的阈值时,车辆驾驶模式会自动变为直线。同时,通过直线模型与曲线模型切换,可以利用直线点和弯曲点的消失,确定弯曲的方向和角度。若在车辆具体行驶中行驶到弯道前,则司机会得到相应的车道情况通知及警报信息。
1.6 弯曲方向的确定
为精准确定车道的弯曲方向,可以通过识别曲线的消失点和直线相交的相对位置,估计出曲线的弯曲方向。弯曲方向确定分4步进行:
(1)Hough变换得到线性方程和参数。
(2)计算左右车道的直线长度的平分位置。
(3)预测车道曲线的消失点、直线的相遇点和车道曲线方向,同时应用直线等分点方式计算车道左弯曲和右弯曲参数。
(4)通过对获取的图像交点和拐点像素值编号分析,确定车道的弯曲方向。
1.7 基于直线曲线模型的车道线检测存在的问题
若车道的坡度较大,则输出的参数会出现一定偏差。基于实践分析可知,近场识别的精准性较远场识别精准性高。为提高车道线检测实效,切实保障行车安全,有必要对基于直线曲线模型的车道线检测法进行优化和完善。
2 基于直线曲线模型的车道线检测的优化分析
为有效优化基于直线曲线模型的车道线检测法,本文提出结合计算机视觉技术,对结构道路上的车道线进行检测。计算机视觉技术在检测全过程中都需要使用开源计算机视觉库(OpenCV)。为提高开源计算机视觉库应用实效,本文采用了sobel阈值法和HLS阈值法滑动窗口搜索,检测并说明道路上的车道和曲线变化情况。
2.1 相机校准
将数码相机捕捉到事物信息输入视频的过程中可能会出现图像失真的情况。其原因是镜头的光学设计、相机相对于物体的位置或物体在图像帧内的位置偏离等。图像失真会影响车道线检测结果的准确性。因此,需要进行相机校准,以正确地检测到图像中的车道线。
针对相机校准,提出了一种基于计算机视觉算法的车道线检测技术,对棋盘图案的结构图像进行检查分析。通过图片内内角调整,即预期测量偏差调整,结合信息失真矩阵系数计算分析,消除图像失真,并固定消除失真后的图像。
2.2 裁剪图像
图像裁剪是去除照片中不需要的或不相关的部分的过程,可以在视觉上关注主要主题,有助于引起人们对主要主题的关注。在确定车道线时,需要先确定并明确车道线区域。通过图像裁剪操作,可以在特定区域内进行图像处理,以提高图像处理效率和质量,确保车道线区域能够被有效识别。
2.3 图像阈值
图像阈值法是将照片分割成小片段后对限制信息进行描述的方法。应用此方法可以在阴影照片或灰度图像中获得二值照片。二值照片降低了原图像中车道线的声誉程序复杂性。在图像对比过度处理过程中,图像阈值法具有更高的效率。
2.3.1 Sobel阈值
Sobel阈值算法应用了核卷积。其中,核是一个3×3矩阵组成的不同加权指数。在Sobel阈值算法应用过程中,Sobel算子可以对图像进行二维空间梯度测量,使“核”这一矩阵是水平和垂直的梯度矩阵。例如,分别在x轴和y轴方向上对图像进行处理。由于车道线的图像阈值处理需要在垂直方向上进行,所以在应用Sobel阈值算法过程中,应赋予y轴更大的权重,以提高图像处理的效率与质量。
2.3.2 HLS阈值
HLS阈值算法主要用于边缘检测,根据像素点的上下、左右邻点的灰度加权差与阈值进行比较,在边缘处达到极值的方法实现边缘检测,可以对图像的色调、亮度、饱和度进行处理。由于图像色调、饱和度成分中包含了重要的颜色信息,所以在HLS阈值算法下提取出的图像信息精准性对图像应用质量产生直接影响。在HLS阈值算法具体应用中,应注意图像中递减的边缘是由亮度分量决定的阈值。
2.3.3 组合阈值
组合应用Sobel阈值算法和HLS阈值算法,可以得到最终的阈值结果,有效提高了车道线检测的精度。将两种阈值结合成最终输出图像,如图1所示。
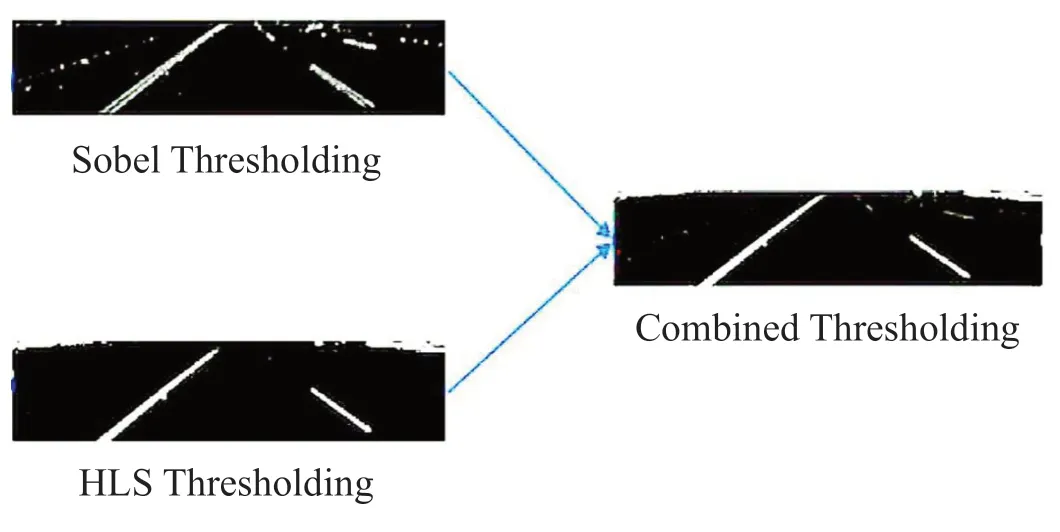
图1:组合HLS阈值和Sobel阈值的最终阈值输出图像
2.4 透视变换
在相机中得到的图像可能会存在透视失真的情况。具体而言,靠近相机源的物体与相机距离较远时,物体大小显示出现偏差,导致图像透视失真。输入的图像中,车道线在一段距离后存在视觉上的相互收敛,但实际上车道线是相互平行的关系。为有效解决此问题,应用透视变换,将3D真实世界的图像转换为2D鸟瞰视图,使图像中的车道线始终为相互平行的关系,以精准判断车道线的确切方向。
2.5 滑动窗口搜索
基于上述计算分析,已经检测到车道的轨迹。为进一步处理图像,需要在产生车道图像的过程中,了解并掌握图像像素的起始x函数。根据车辆结构分析可知,车辆不同窗户顶部的窗户沿车身走向的上方即车道。利用此特征,计算平均像素x值,得到图像中相应的标识,并建立图像中车辆的窗口基点,得到车道顶峰数值信息。通过滑动窗口搜索计算,可以累积充分的图像像素,以有效、精准计算车道线的曲率半径。曲率二阶微分方程,表示为:

式中,A、B、C为常数项;A≠0。
公式计算,可以得出x和y位置的左右车道线的像素值。通过应用滑动窗口搜索,有效提高了搜索工作实效。通过滑动窗口搜索得到的图像如图2所示。
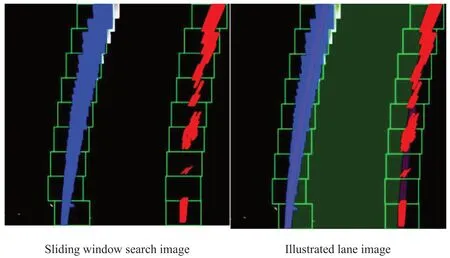
图2:滑动窗口搜索得到的图像
2.6 图像阴影线
滑动窗口搜索需要从顶峰的角度计算开始,以有效诊断出车道具体位置,并得出车道线的数据信息。对图2进行裁剪操作后,图像阴影线显示在输入图像中(图3所示)。
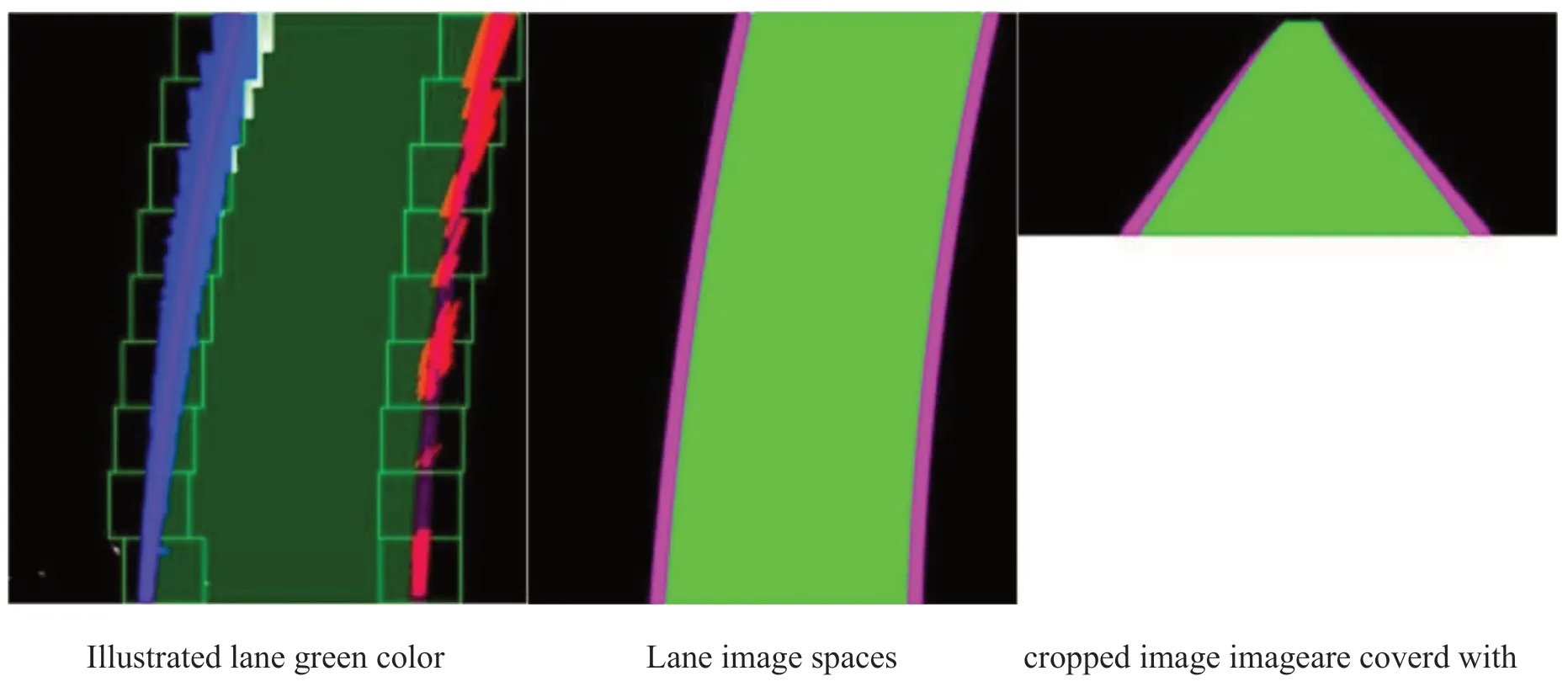
图3:图像裁剪后的阴影线
图3中的两条粉红色的线表示车道,它们之间的空间是绿色,用以表示路面。同时,通过测量与车道线相切的最小圆的半径,计算出车道的曲率半径值。结合相关原理及实践分析可知,若车道为直线车道,则其半径值较大。通过明确图像像素高度、车道长度、图像像素宽度与车道宽度的比,可以将图像的像素空间转换为实际车道线长度单位:米。另外,车辆到车道中心的距离是偏移左右车道与车道右线底部坐标的平均值。在此基础上,减去中心点作为偏移,再乘以车道像素与实际车道的宽度比,最终确定图像的阴影线部分。
2.7 图像展开到相机视图
完成图像校正后,需要将图像展开到相机视图中,以快速识别车道障碍物。车道障碍物被正确识别并展开到相机视图的未失真图像后,得到车道线检测的最终结果,如图4所示。
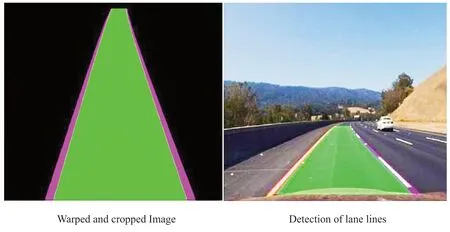
图4:车道线检测的最终结果
3 结论
车道线检测是保障车辆行驶安全的重要内容,在信息技术快速发展的背景下,车道线检测任务对应的场景愈加多样化,导致基于传统图像处理的车道线检测方法几乎无法实现有效检测。因此,有必要对车道线检测技术进行深度研究。
本文以实践应用为视角,提出一种基于计算机视觉算法的车道线检测技术。在验证该车道线检测技术的有效性,以Windows操作系统基础,应用python编程语言、OpenCV库、sobel阈值法、HLS阈值和滑动窗口搜索算法,执行车道线检测技术,实现了车道精准检测和车道可视化分析。另外,通过图像计算与可视化处理,得到车道的曲率半径、车辆与车道曲线的方向等数据信息,精准、有效地检测到车道上的障碍物及弯道情况,并能够为驾驶员提供预警服务。
综合而言,本文未从经济性视角、技术实施范围等视角对该车道线检测技术进行研究,这需要在后续研究中进行深度分析,以丰富研究成果,并为车道线检测技术研究及应用提供借鉴和参考。
