高可靠性余度伺服系统设计技术研究
2022-07-07王梦佳张华张昆峰
王梦佳 张华 张昆峰
(1.中国空空导弹研究院 河南省洛阳市 471009 2.空装驻洛阳地区第一军事代表室 河南省洛阳市 471009)
高性能伺服系统广泛应用于军事工业、高端智能装备领域,它是机载、弹载及陆用等装备自动控制系统中的重要组成部分,是实现武器系统位置、速度、力矩等参数控制的执行机构,根据动力来源伺服系统可分为液压、气动和电动三种。早期电动伺服系统存在体积大、输出力矩小、控制精度相对较低等缺点,但随着稀土材料的突破和微电机技术、智能控制单元的普及、高精密加工技术的发展,使得电动伺服系统的性能出现了长足的进步,功能上向着体积更小、重量更轻和多功能方向发展,性能上体现出高精度、高效率和重量轻的优势,同时便于维护。目前电动伺服系统已成为伺服系统的主要形式。
随着现代飞行器的速域和空域不断扩展,以高超声速滑翔飞行器、吸气式高超声速飞行器为代表的临近空间飞行器已成为当今空天领域发展的战略制高点。临近空间飞行器在飞行过程中速度变化范围大(几Ma到数十Ma),飞行高度覆盖空域广(20km至上百km),飞行动压大,舵面铰链力矩及转动惯量大,因此对伺服作动系统的负载能力、功率密度、动态特性、可靠性均提出了更高的要求。美国的F-4“鬼怪式”战机从服役到1972年为止共坠毁170架;美国海军F-14战机自服役起共坠毁161架,其中有多起是因为舵面故障导致飞机失控坠毁。这些事故的出现表明,作为飞行器上的重要执行机构,伺服的可靠性直接影响飞机系统的作战效能及飞行安全。
针对某高超声速飞行器的伺服系统的高可靠性、高性能控制需求,开展基于余度技术的高性能伺服系统设计技术研究。系统基于双绕组无刷直流电机,采用热备份工作方案,分别完成了系统电气单元、结构单元的双余度设计;开展了余度控制技术研究,以解决双绕组电机同时工作引入的力纷争问题,最终实现了伺服系统的高可靠性、高控制精度。
1 系统余度设计
采用余度技术可以有效的提高系统可靠性。余度技术是指通过为系统增加多重资源,包括硬件与软件的重复配置,实现对多重资源的合理管理从而提高产品和系统可靠性的设计方法。实现余度控制一般有两种形式:冷备份和热备份。冷备份是指在正常情况下,只有一个余度正常工作,另一余度不工作,当系统出现故障时,立刻切除发生故障的余度,同时另一余度开始工作;热备份是指在正常情况下,两余度同时工作,当某一余度出现障时,系统切除发生故障的余度,启用单余度方式。热备份方式的优点是不存在备份切换时间,有利于保持系统控制稳定性。
伺服系统主要包括控制电路、驱动电路、驱动电机、传感器和传动机构。其中电气系统如控制电路、驱动电路、传感器和驱动电机绕组,为系统可靠性的薄弱环节,传动机构、永磁体等结构部分可靠性较高,因此系统设计主要针对可靠性薄弱环节进行余度设计。系统设计框图如图1所示。
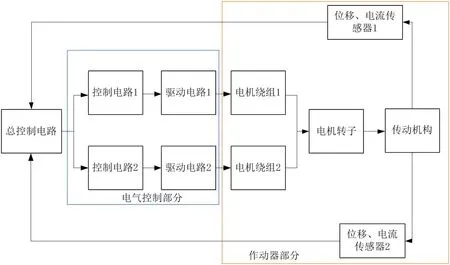
图1:系统设计框图
1.1 电气控制余度设计
电气控制部分详细结构设计如图2所示。
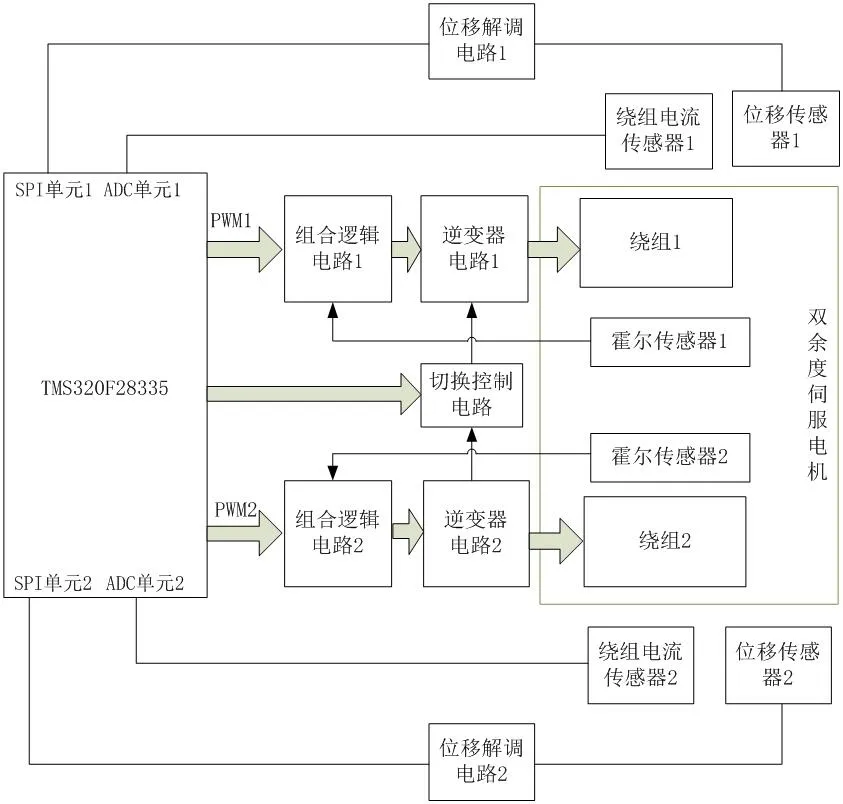
图2:电气控制部分详细设计框图
电气控制部分采用TMS320F28335作为主控单元,包括TMS320F28335数字信号处理器、组合逻辑电路、逆变器电路、绕组电流传感器、位移传感器和位移解调电路。
其中组合逻辑电路、逆变器电路采用双余度设计,组合逻辑电路1、逆变器电路1接收伺服电机的霍尔传感器1的输出、TMS320F28335输出的PWM1控制信号,用于驱动伺服电机的绕组1;组合逻辑电路2、逆变器电路2接收伺服电机的霍尔传感器2的输出、TMS320F28335输出的PWM2控制信号,用于驱动伺服电机的绕组2。位移传感系统采用双余度设计,位移传感器1、位移传感器2用于采集伺服系统的线位移,并通过位移解调电路1、位移解调电路1解算为电压信号,再输出到TMS320F28335中进行模数转换,从而实现系统位移闭环控制。电路传感系统采用双余度设计,电路传感器1、电路传感器2分别用于实现伺服电机绕组1、绕组2的电流采样,然后将采样值送入TMS320F28335,从而实现电流闭环控制。TMS320F28335信号处理器接收绕组电流测试值、位移测试值,综合控制指令,采用故障检测、闭环控制、电流均衡算法,实现双余度系统工作。
正常情况下,双余度正常工作,当TMS320F28335内置故障检测算法检测出某一余度出现故障时,TMS320F28335输出控制指令,控制切换控制电路切断故障余度,另一余度承担全部负载,继续保持正常工作状态。切换控制电路如图3所示。

图3:切换控制电路
1.2 作动器余度设计
作动器包括伺服电机、传动机构和传感器。本文对可靠性薄弱环节电机绕组、电流传感器和位移传感器进行冗余设计。其中伺服电机包含两套独立绕组、两套霍尔位置传感器,两套绕组共用一机械电机转轴。两套绕组的电相位相差30°。两套电流传感器分别采集两套电机绕组的电流,两套位移传感器分别采集伺服系统输出的线位移。如图4所示。

图4:作动器余度设计
1.3 余度控制策略
1.3.1 电流均衡技术
在正常情况下,两余度同时处于工作状态。采用双余度电机并联驱动,由于双通道间不对称,包括电机及其它各部件存在差异、装配质量和条件(传感器)的不同,以及传感器信号误差等因素,因此两个余度出现输出力不均、力纷争问题,从而出现顶牛现象甚至卡死,严重时甚至会损坏系统结构。针对双余度问题引入的力纷争问题,引入绕组电流传感器实现电流均衡,从而避免力纷争问题。电流均衡控制技术如图5所示。
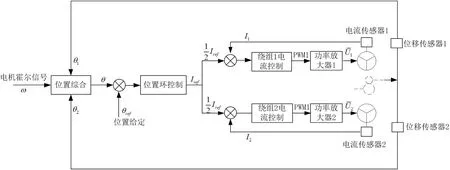
图5:电流均衡控制技术
电流均衡控制单元主要包括位置综合单元、位置环控制单元、绕组1电流控制单元和绕组2电流控制单元。位置综合单元同时接收位移传感器1、位移传感器2输出位移θ(k)、θ(k),k代表采样时刻,同时接收电机霍尔信号并解算出电机转速信号ω。设置一正常数ζ。
当||θ(k)‐θ(k)||≤ζ,位置综合单元的输出θ(k)为:

当||θ(k)‐θ(k)||≥ζ,表征位移传感器1、位移传感器2中某一传感器出现故障,此时引入霍尔信号解算出的电机转速信号ω。由于伺服系统在工作过程中,执行机构基本不会发生变形,因此减速比函数稳定,可根据电机转速信号解算出伺服系统位移。


如果||θ(k)‐θ(k)||≤γ,||θ(k)‐θ(k)||>γ则判定传感器2故障,此时θ(k)=θ(k);
如果||θ(k)‐θ(k)||≤γ,||θ(k)‐θ(k)||>γ则判定传感器2故障,此时θ(k)=θ(k)。
位置环控制单元综合接收位置给定θ、位置综合单元输出位移θ、输出电流控制指令I,然后将电流控制指令平分,分别作为绕组1电流控制单元、绕组2电流控制单元的输入。绕组1、2电流控制单元综合电流控制指令0.5I、接收电流反馈I、I实现电流控制闭环,输出PWM控制指令到功率放大器实现功率放大,从而实现力矩均衡输出,避免力纷争问题。
1.3.2 余度管理
针对电气系统中供电电路、组合逻辑电路、霍尔传感器故障、通信接口故障,控制软件中设置超时判断逻辑,如果信号电平、采集数据在外部激励条件下超过一定时间没有发生变化,则判定故障,切换控制电路切断故障通道的母线。故障通道电机工作在发电机模式产生感生电压,通过IGBT的寄生二极管在与故障驱动器母线上产生反电动势,但由于母线已经断开,反电动势没有回路,不会和前级电路形成回路产生电流,不会对前级电路、正常通道电机造成影响。
针对逆变强电路单元,当某一IGBT出现断路时,该相某一时刻电流为0;IGBT出现短路时,该相某一时刻出现大电流;同桥臂直通时,电路中产生大电流;某一桥臂两IGBT均断路,该电流始终为0;通过电流检测可以检测IGBT短路或开路故障,切换控制电路切断故障通道的母线。
针对伺服电机,如果一相绕组出现断路故障,则故障绕组电流为0,该故障可检测,切换控制电路切断故障通道的母线。
若电机内部绕组短路,在短路绕组之间产生回路电流,增加了正常电机通道的负载,如果短路线圈匝数较少,故障不可检测;当短路匝数较多时,出现较大电流,该故障可检测。系统的余度工作模式如表1所示。

表1:余度工作模式
2 试验验证
分别设置位置传感器故障、组合逻辑电路故障、电机绕组断路故障,伺服系统可以实现故障检测、隔离与余度切换。余度控制措施有效。
伺服系统启动时、施加瞬时负载时,绕组1、绕组2电流测试结果如图6所示,可以看到,绕组1和绕组2电流大小、相位基本一致,力矩均衡措施有效。

图6:系统启动、施加瞬时负载时绕组1、2电流测试曲线
当给定指令在-18°~+18°全工作行程内,角度变化步长2°,舵系统输出、控制误差曲线如图7所示。
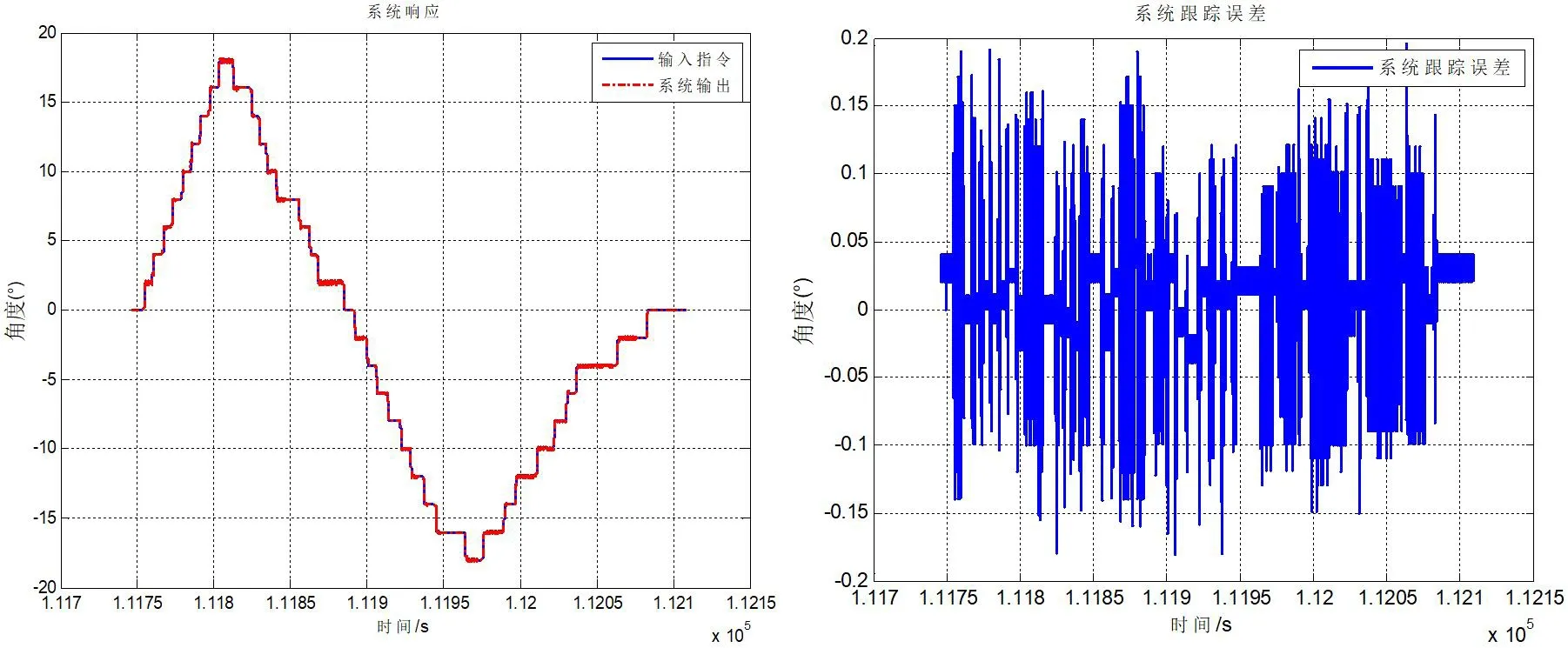
图7:系统测试输出和控制误差曲线
可以看到,舵系统在全工作行程内的控制误差最大约为0.2°。
当系统输入10°阶跃信号,系统输出结果如图8所示,系统超调为0.14%,上升时间约为119ms。

图8:10°阶跃信号时系统输出
3 结论
本文完成了一种基于双绕组无刷直流电机的高可靠性双余度伺服系统设计。该系统采用TMS320F28335作为主控单元,针对电气、结构部分中的可靠性薄弱环节如组合逻辑电路、驱动电路、传感器、电机绕组等进行了余度设计,并完成了余度切换控制系统设计。在余度控制策略方面,该系统采用热备份工作方案,对余度系统进行管理,针对双绕组电机同时工作引入的力纷争问题,提出了基于电流均衡技术的双闭环控制策略。
系统试验结果表明,系统可以实现故障检测、隔离与余度切换,双绕组电机力矩平衡措施有效,系统具有可靠性高、控制精度高、稳态误差小、快速性高等优点,对提升飞行器的可靠性、控制性能具有重要意义。