民用无人机感知和避让方法研究
2022-07-07李雄
摘 要:针对未来无人机进入非隔离空域的发展趋势,分析无人机系统进入非隔离空域所需要的感知和避让(DAA)能力需求,结合当前国内外民航运行管理要求以及有人机防撞手段,提出了一种无人机感知和避让系统的架构,使无人机在遭遇碰撞威胁时,具备能够进行自我隔离并防止空中碰撞,达到安全运行可接受的安全水平,作为未来无人机感知和避让系统设计的参考和建议。
关键词:无人机;感知和避让;防撞
中图分类号:TP39 文献标识码:A文章编号:2096-4706(2022)04-0157-04
Research on Perception and Avoidance Methods of Civil UAV
LI Xiong
(China Helicopter Research and Development Institute, Jingdezhen 333001, China)
Abstract: In view of the development trend of UAV entering non isolated airspace in the future, this paper analyzes the perception and avoidance (DAA) capability requirements required by UAV system when entering non isolated airspace, and puts forward an architecture of UAV perception and avoidance system in combination with the current domestic and foreign civil aviation operation management requirements and manned vehicle anti-collision means, so that when UAV encounters collision threat, it is capable of self isolation and preventing air collision to achieve an acceptable safety level for safe operation, which can be used as a reference and suggestion for the design of UAV perception and avoidance system in the future.
Keywords: UAV; perception and avoidance; anti-collision
0 引 言
無人机在军民各个领域广泛引用,飞行活动量的不断增加,给复杂空域环境内的其他飞行器以及地面第三方带来很大的安全隐患。无人机可能引发的危害主要包括空中相撞和地面撞击,其中无人机与有人机之间的空中相撞是主要关注对象。为保障飞行安全,各国目前将无人机活动限制在特定的空域内,与有人机隔离运行。但在有限的空域资源下,隔离运行方式将难以满足无人机日益增长的应用需求。无人机与有人机共享空域飞行是未来的发展趋势,避免无人机之间、无人机与有人机之间的碰撞危险是无人机进入融合空域亟待解决的关键问题。
由于缺乏机载飞行员,因此可能需要使用适当的技术和程序,使无人机驾驶员具备类似于有人机驾驶员看见、察觉或探测交通冲突或其他危险并采取适当行动的能力,即感知和避让(DAA),以用来避开附近的航空器(以下简称“入侵者”),确保无人机安全运行,实现与所有用户一起充分融入各类空域。
1 DAA功能需求
感知和避让使无人机在遭遇其他飞行器时能够观察、感知或检测交通冲突或其他危险,并采取符合相关飞行规定的适当行动的能力,进行自我隔离并防止空中碰撞,以达到有人机感知与规避运行所满足的可接受的安全水平。无人机系统配备DAA系统应具有:(1)在无人机系统(包括无人机驾驶员)探测到具有威胁的航空器正在进入防撞门限时,向无人机驾驶员发出告警。当可具有威胁的航空器接近冲突空域体时,应启动防撞机动飞行;(2)提供预计接受管制以便在所有空域内运行的任何航空器上的预定功能;(3)所采用的传感器和系统的类型和位置是清晰的;(4)在协作系统(如C/S模式应答机、广播式自动相关监视、机载防撞系统)配置方面,符合现有监管设备的配置要求;(5)与机载防撞系统可互联互通;(6)遵守通行权规则,除非遵守这些规则有损安全(即导致机动飞行比不遵守通行权规则时更加危险)。
如果某一交通冲突穿过无人机的充分间隔阀值,感知和避让系统应警告无人机驾驶员采取行动,以防止该入侵者进入保持充分间隔空域体,给无人机造成威胁。同样,如果某一威胁穿过无人机的防撞阀值,感知和避让系统应警告无人机驾驶员采取行动,以防止该入侵者进入冲突空域体,与无人机出现相撞风险。
2 系统架构
由于无人机系统由无人飞行器和地面控制站组成,DAA的功能应当分别在无人机和控制站上进行实现,DAA系统设备包括硬件、软件、固件、处理器、显示器和操纵器件,以执行感知和避让系统的预期功能,系统主要包括:(1)无人机监视设备:包括ATAR、ADS-B输入和机载主动监视或7.1版的TCAS Ⅱ;(2)无人机机载DAA处理器:此处理器安装在无人机上,它接收自身的数据、来自机上监视设备的数据,以及数据链路的数据,然后对数据进行处理,并将轨迹和其他DAA信息通过数据链路传输到控制站,机载DAA除接收其他监控数据外,还接收TCAS Ⅱ的数据。传递到机载DAA处理器的附加数据包括自身飞行路径数据和到自动飞控系统的飞行控制引导数据;(3)控制站DAA处理器:此处理器安装在控制站中。按照优先级顺序接收机载DAA系统通过数据链路传输的轨迹信息和DAA状态信息、来自控制站内DAA控制面板的DAA模式控制指令。然后对数据进行处理,将信息转发给DAA显示和音频告警系统。同样,它将DAA模式控制和指令数据转发给数据链路;(4)控制站DAA模式控制面板:这是驾驶员与机载和控制站DAA处理器之间的接口。它从控制站DAA处理器接收DAA状态信息,同时向控制站DAA处理器发送命令和控制信息;(5)控制站DAA交通显示:从控制站DAA处理器接收数据,通过显示器和音频告警向驾驶员提供交通信息。显示器和音频扬声器可以是专用DAA设备的一部分,也可以是其他存在系统的一部分。
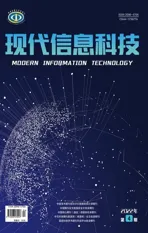
如图1所示,描述了DAA的顶层架构,以及DAA与无人机、其他航空器、ATC以及控制站相关的接口关系。DAA系统由感知避让设备、无人机、控制站、入侵者、空中交通管制(ATC)、地面监视、导航系统以及通信系统、无人机系统驾驶员、数据链路以及其他保持“感知和避让”充分间隔所需的无人机系统设备组成。
如图1所示,接口A到M用来提供每个主要系统外部出现的信息。交通信息始于从入侵者到无人机(接口A),因此,从传感器数据到无人机的延迟最短。然后在无人机内部建立接口B~D,在无人机控制站内建立接口F~I。无人机通过接口A接收到入侵者相关的数据,例如状态信息和决断提示(RA)。入侵者(如果是合作型)发送数据至空中交通管制(ATC)控制站(接口M),或者直接发送至无人机(接口A)。无人机连同由接口J提供的本机信息和数据一起处理入侵者数据。无人机直接或通过接口E确定的卫星发送数据至控制站,控制站接收处理这些数据,并将其显示给驾驶员。利用这些信息,驾驶员决定是否需要采取措施。如果需要采取措施,驾驶员将通过接口K联系空中交通管制(ATC)。空中交通管制(ATC)通过接口M从地面雷达和广播式自相关监视(ADS-B)控制站获得无人机和入侵者的监视信息,并通过接口L与入侵者进行通信。
感知和避让(DAA)设备有两个不同的区域:无人机和控制站。无人机域使用三种传感器用来感知交通,包括机载主动监视、ADS-B和机载雷达,这些监视类型对感知大部分交通类型是必要的,包括非合作型航空器、配备空中交通管制雷达信标系统(ATCRBS)的航空器、配备ADS-B的航空器、配备S模式的航空器以及配备TCAS Ⅱ的航空器。控制站域允许无人机驾驶员通过显示器、告警、通信系统和空中交通管制(ATC)在各类空域内实施安全有效的运行。感知和避让(DAA)设备可以自动和手动两种模式,但最低运行要求应设定为在无人机驾驶员控制的情况,其他所有与设备配合的模式(自动/其他)是可选择的。
3 机载监视设备
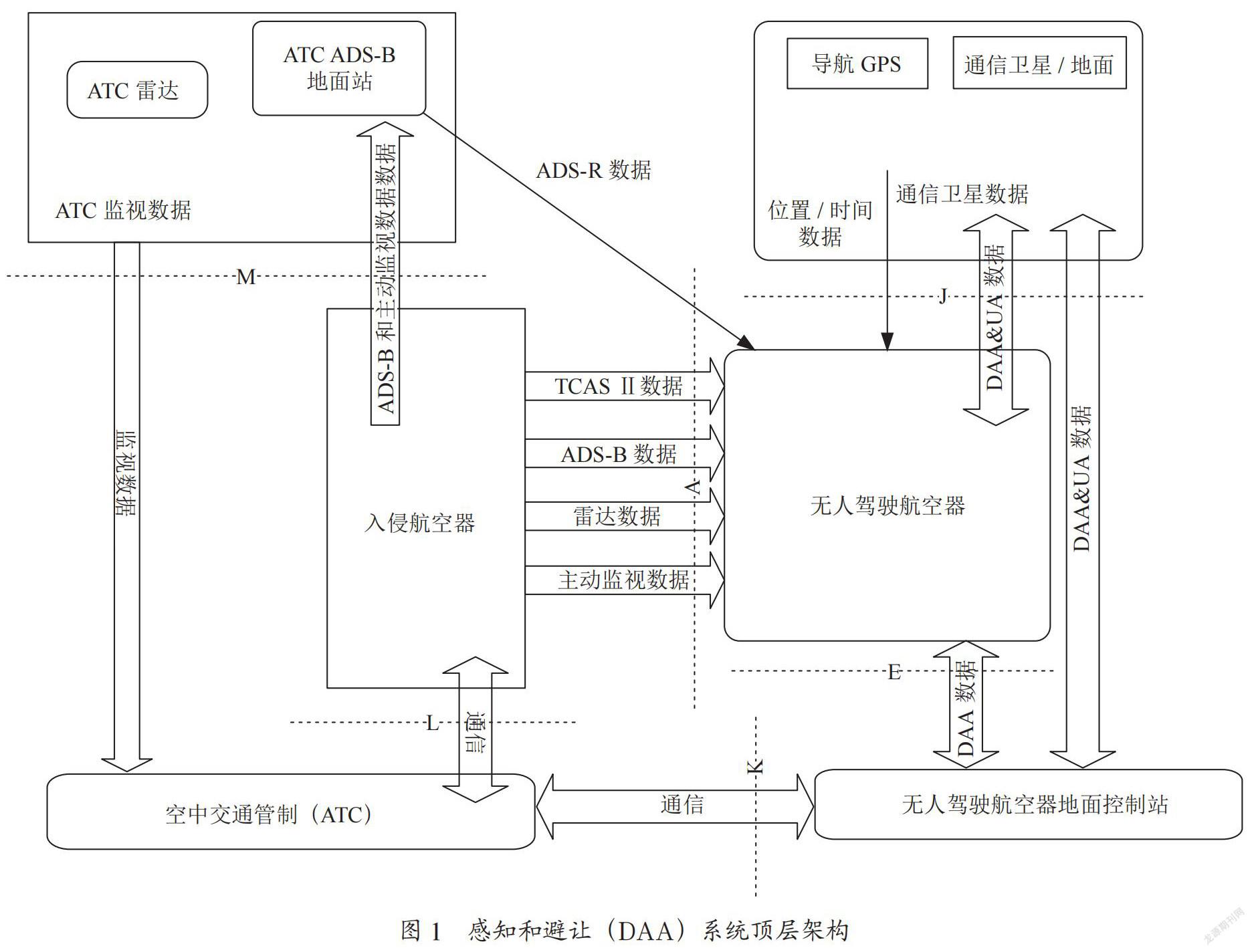
如图2所示,提供了一种机载DAA架构的功能视图,机载DAA监控设备在最大航空器密度下为多种配置构型的航空器提供监视覆盖。需要传感器来探测无人机周围的交通情况。根据入侵者的配置不同,探测它们所需的传感器也不同,需要三种监控源:ADS-B输入、主动监控和机载雷达。未来可能会研发光学传感器和其他高级传感器。入侵者可以分为合作型或非合作型。合作型入侵者携带的设备允许接收入侵的状态信息,而非合作型入侵者是“沉默的”,所有狀态数据必须由自身的传感器确定。在这些性能要求下,用于感知合作型入侵者的传感器是主动监视和ADS-B接收器。非合作型目标,没有发射机或ADS-B广播的能力,通过机载雷达传感器来感知。机载DAA设备由四个主要部分组成:一组监视源、DAA处理器、安装结构、数据链路设备。
监视源至少包括以下内容:(1)机载主动监视,实现对其他配备了S模式和空中交通管制雷达信标系统(ATCRBS)的航空器的监视;(2)广播式自相关监视(ADS-B)输入单元,提供邻近航空器发射的广播式自相关监视(ADS-B)数据,以及如果没有配备双向链路,则接收转播式自相关监视(ADS-R)数据;(3)追踪合作型和非合作型航空器的雷达;(4)选装的交通告警和防撞系统Ⅱ型(TCAS Ⅱ)设备,能够与其他配备了具有决断提示(RA)能力TCAS Ⅱ的航空器协调,并具有防撞系统逻辑数据,可以直接发送至飞行控制系统进行自动响应。
机载DAA接收和发射系统及应答机功能模块由ADS-B接收机、主动应答询问机和应答接收机组成,应答机同样支持S模式信息,以便能够与入侵者配备的TCAS协调。DAA雷达向机载DAA设备功能块提供合作和非合作入侵者的信息。
无人机系统向机载DAA处理器提供本机的状态数据,这些数据可能来自主导航系统和飞行管理系统。还向机载DAA处理器发送控制模式信息(来自控制站)。
机载DAA处理器从监视源和各类无人机系统接收数据,然后对这些数据进行合成和处理,并创建入侵者踪迹,提供给机上充分间隔和TCAS Ⅱ使用。DAA处理器包括处理监视数据以生成轨迹的软件。目前假设在航空器上处理告警来帮助确定轨迹的优先级,可以通过控制站的DAA处理器提供告警。机载DAA处理器和TCAS Ⅱ可共享相同的物理处理器和通用功能。其他机载信息,比如位置和高度,提供给机载DAA设备以保证充分间隔和防撞功能。UA机载DAA设备的数据通过CNPC链路发送到控制站,在发送到DAA交通显示器之前,由控制站内DAA处理器进行更进一步的处理。向UAS驾驶员提供视觉和听觉告警,UAS驾驶员开始DWC机动通过CNPC数据链路发送回UA,并通过飞行控制系统执行。
DAA系统可选择向机载自动飞行控制系统或自动驾驶仪发送指令,以便自动执行决断提示,也便于驾驶员的超控能力。关于引导处理功能,可以由无人机机载DAA处理器提供,但在本架构中假设由控制站DAA处理器提供;
机载数据链路设备向控制站发送DAA数据包和其他必要信息,用于驾驶员的操纵。并从控制站接收数据包,从驾驶员接收DAA模式的输入和机动。
UAS驾驶员通过直接的甚高频/超高频(VHF/UHF)通信、UA上无线电中继,以及将来可能通过直接的地面链路与ATC保持双向通信。ATC还通过无线电与一些入侵者通信,ATC通过当前的监视系统跟踪入侵者和UA。
4 控制站系统
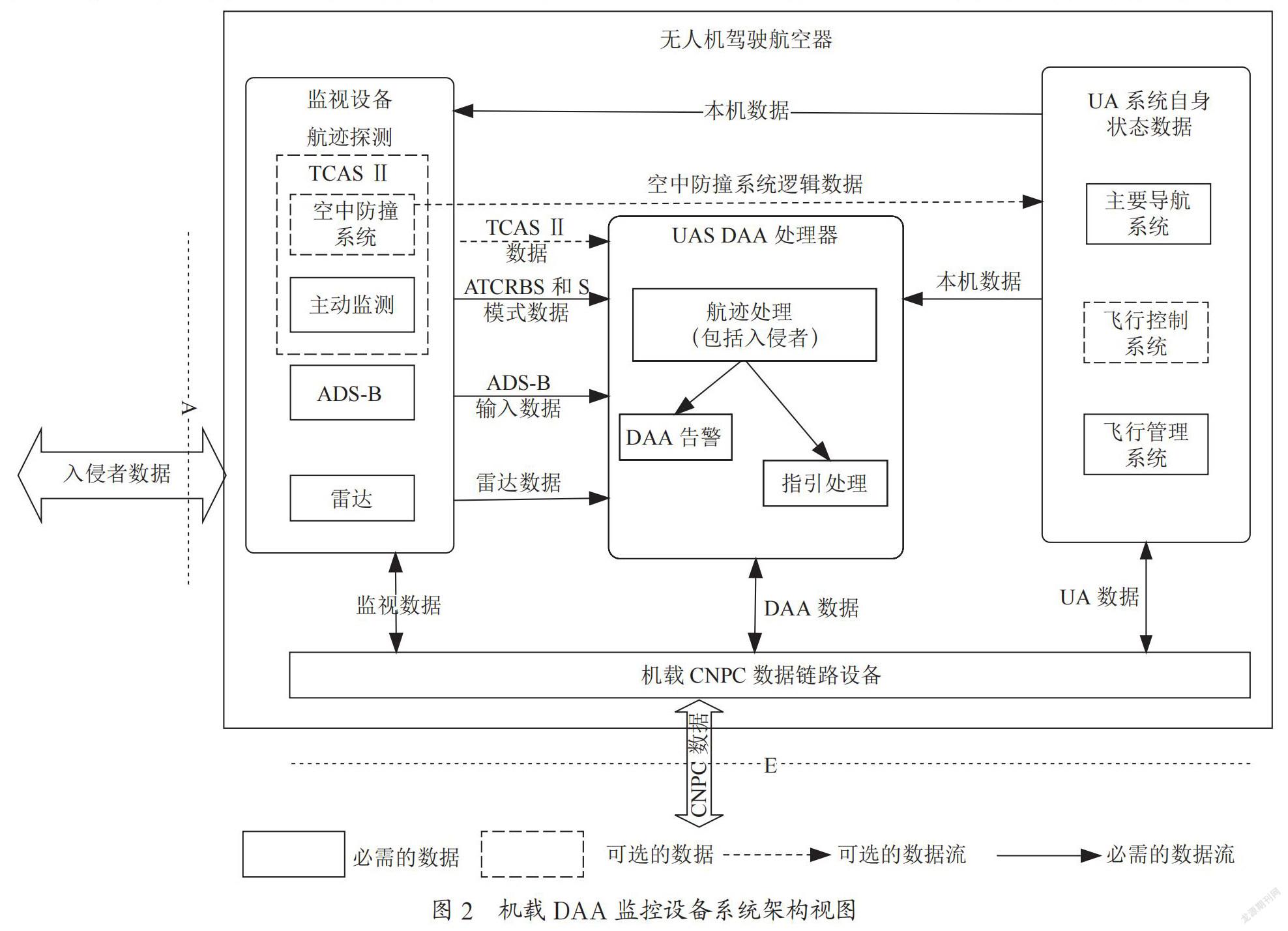
控制站内的感知和避让(DAA)系统由六个主要部分组成,如图3所示。
系统的六个主要部分组成如下:(1)控制站内的数据链路设备从无人机接收机载DAA处理器的数据和监视数据。它也可能接收引导处理数据(取决于系统的设计,此功能是在无人机上还是控制站内);(2)控制站内的DAA处理器从数据链路设备接收数据并进行处理,类似于机载DAA处理器。它向相关的设备发送DAA数据信息,以支持DAA功能和确定控制站内告警的级别;(3)DAA控制面板为驾驶员提供界面,用于切换DAA系统的不同模式或功能;(4)显示系统包括DAA交通显示以及驾驶员使用的用于其他显示和听觉告警,用于决定保持感知和避让充分间隔所需的措施;(5)驾驶员根据交通管制、无人机控制设备和DAA设备提供的信息而采取行动;(6)无人机控制和导航系统控制无人机的运行。它允许系统驾驶员实施机动,包括可能的速度、坡度、高度和航向的改变。
5 结 论
综上所述,本文針对未来与有人机进行空域融合的无人机系统,初步构建了一种感知和避让的方法,该系统提供对无人机航空器周围空域的监视,将交通和DAA系统的信息将被发送至控制站,以适当的方式显示给驾驶员,向驾驶员提供了电子感知、对合作型和非合作型航空器都可以追踪的手段,从而达到无人机在融合空域中的自我隔离和空中防撞能力,以实现无人机系统进入空域的要求,确保航空器的飞行安全。
参考文献:
[1] 中国民用航空局.无人机围栏:MH/T 2008-2017 [S].北京:中国民用航空局,2017.
[2] 黎峰.空中交通警戒和防撞系统的发展历程 [J].中国民用航空,2004(10):81-83.
[3] 民航资源网.欧洲航空安全局发布无人机运营框架说明 [EB/OL].(2015-08-25). http://news.carnoc.com/list/322/322259.html.
[4] 金镭,苗延青,史校川,等.国内民用无人机适航管理思考 [J].航空标准化与质量,2016(5):33-36.
[5] 中国民用航空局.关于下发《广播式自动相关监视(ADS-B)管制运行规程》的通知 [R/OL].(2011-11-23).http://www.caac.gov.cn/XXGK/XXGK/GFXWJ/201511/t20151102_8121.html.
[6] RTCA.DO-365 Minimum Operational Performance Standards (MOPS) for Detect and Avoid (DAA) Systems [S].Washington:RTCA Inc,2017.[2022-01-02].https://www.rtca.org/?s=DO-365.
[7] RTCA.DO-366 Performance Standards for Air-to-Air Radar for Traffic Surveillance [S].Washington:RTCA Inc,2017.[2022-01-02].https://www.rtca.org/?s=DO-366.
[8] 刘国锋.简述ADS-BIN技术在中国的应用前景 [J].电脑知识与技术,2012,8(3):704-706.
作者简介:李雄(1987.08—),男,汉族,甘肃武威人,工程师,本科,研究方向:体系工程。