一种集装箱起重机吊具零位补偿方法*
2022-07-06刘春明张科昌生绿伟
刘春明 张科昌 生绿伟
上海振华重工(集团)股份有限公司
1 引言
随着集装箱码头的吞吐量急剧增加,集装箱运输船舶的不断增大,劳动力成本的不断上升,以及环境保护理念的不断增强,高效、智慧、绿色的自动化码头逐步成为港口发展的必然趋势[1]。集装箱码头的全自动化或半自动化改造已成为世界各港口和码头运营商的关注焦点,集装箱起重机是港口运输集装箱的重要装备,集装箱起重机的自动化程度体现了港口智慧化智能化的水平[2]。
在集装箱码头的自动运输集装箱环节中,起重机的自动化作业主要包括自动抓箱、自动运行和自动着箱[3-4]。在自动抓箱过程中,自动化控制器通过调整起重机的吊具,使吊具对准并贴紧集装箱的上表面,然后将集装箱提起。在自动运行过程中,自动化控制器通过移动起重机的小车和调整吊具钢丝绳的长度来运送空吊具或带载吊具,使其按照预定的轨迹运行。在自动放箱过程中,自动化控制器通过调整起重机的吊具,使吊具所带的集装箱对准并贴紧目标集装箱箱位,然后将集装箱放下。自动抓箱和放箱是难度较高的动作。
在集装箱起重机的全自动化作业过程中,吊具通过钢丝绳连接到起重机小车,因此具有单摆的摇摆特性,所以需要对起重机吊具的零位进行检测。当起重机进行自动运行时,不需要精确的吊具零位,往往仅对吊具的零位进行粗略标定,标定方法一般采用固定小车位置,缓慢变动起升,建立吊具零位与小车位置和起升高度的关系表,通过查表的方法查找当前零位。当执行自动抓箱或自动着箱时,需要精确的吊具零位,而依据传统标定方法的吊具真实零位与标定零位往往偏差过大,降低了抓箱或着箱的成功率和装卸效率。提高吊具零位准确度的一个方法是增加标定的小车位置数量,即增加关系表的维数,但关系表越大,其维护也越复杂。因此,如何检测吊具零位是起重机自动装卸的关键技术之一。
在不计吊具偏载引起的吊具旋转的情况下,由于吊具钢丝绳的不同缠绕方式,使得吊具随起升高度的不同,会在水平方向产生不同的平移现象。提出了一种基于钢丝绳缠绕模型的吊具零位补偿计算方法,该方法通过计算吊具在不同起升高度时对应的水平偏移值,给出补偿量,消除其对水平偏移的影响。
2 吊具钢丝绳卷绕方式
起重机吊具的自动抓箱、自动着箱和自动防摇运行都需要对吊具的零位进行检测。然而,起重机的机械结构,如大车轨道倾斜、弯曲,起重机大梁形变,吊具钢丝绳卷绕模式都会对吊具零位的检测精度产生影响。钢丝绳采用的混合缠绕方式使得吊具零位并不处在挂装中心位置,需要对集装箱起重机的吊具零位进行补偿。港口岸边集装箱起重机吊具上架有4个动滑轮,分别与起重机小车上的4个定滑轮直接卷绕。通过改变钢丝绳的长度,改变集装箱起重机吊具的高度。
简化后的集装箱起重机小车-吊具模型见图1。集装箱起重机的吊具下架用来抓放集装箱,吊具上架通过固定的动滑轮组及其卷绕的钢丝绳与起重机小车相连接。集装箱起重机的小车通过固定的定滑轮组及其卷绕的钢丝绳与吊具上架相连接。
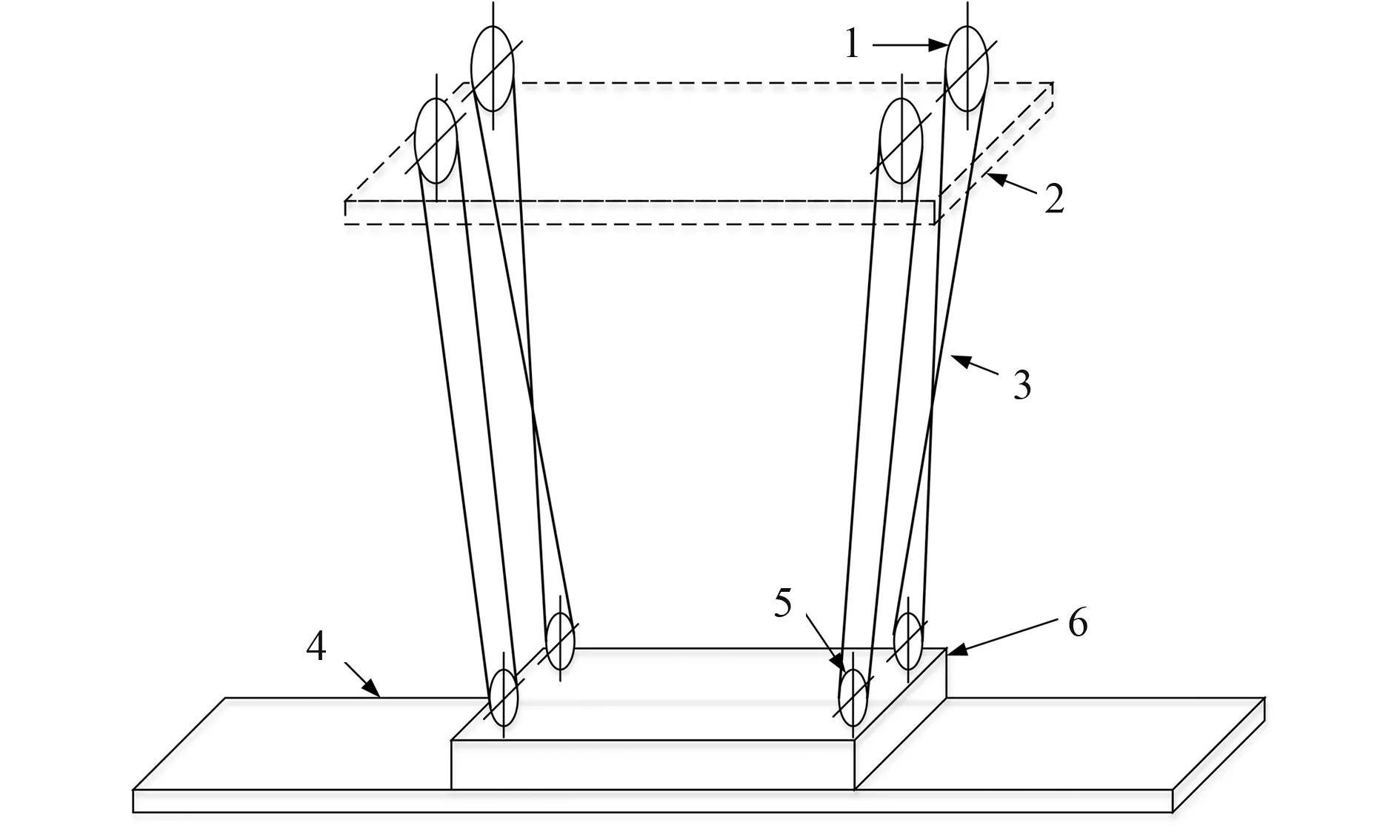
1.定滑轮 2.小车架 3.钢丝绳 4.吊具下架 5.动滑轮6.吊具上架
从吊具的侧面可以看出,钢丝绳的卷绕方式主要有3种:平行卷绕、交叉卷绕和混合卷绕(见图2)。由于平行卷绕和交叉卷绕都是左右对称的关系,在不计吊具偏载引起的吊具旋转的情况下,其吊具零位未发生变化。但是吊具钢丝绳的混合卷绕方式,使得吊具随起升高度的不同,在水平方向产生平移现象。

图2 吊具钢丝绳卷绕示意简图
3 吊具零位补偿计算方法
钢丝绳混合缠绕方式中,左侧一组定滑轮和动滑轮采用了平行卷绕,右侧一组定滑轮和动滑轮采用了交叉卷绕,只考虑小车和吊具同一侧的2个定滑轮和动滑轮,得到吊具钢丝绳混合卷绕计算模型(见图3)。

图3 吊具钢丝绳混合卷绕示意图
小车架上的两个定滑轮的半径均为R,它们的中心点A和点B处在同一水平高度,其中心点为O,点A和点B之间的距离为L;吊具上架的两个动滑轮的半径均为r,它们的中心点C和点D处在同一水平高度,其中心点为E,点C和点D之间的距离为l。以点O为原点,点O指向点B为OX轴,垂直向上为OY轴,建立直角坐标系OXY。左侧定滑轮与动滑轮的中心连线与切线之间的夹角为θl,右侧定滑轮与动滑轮的中心连线与切线之间的夹角为θr。因此,点A和点B的坐标为:
(1)
点C和点D的坐标为:
(2)
线段AC和BD的长度分别为:
(3)
夹角θl和θr分别为:
(4)
左、右侧滑轮组中的钢丝绳总长度sl和sr分别为:
(5)
当吊具零位保持不变时,即在xE≡0的情况下,式(2)~(4)可简化为式(6)~(8):
(6)
(7)
(8)
当滑轮之间的距离L和l,滑轮半径R和r为常数时,利用公式(5)可以得到保持吊具零位时,左、右侧滑轮组中的钢丝绳总长度sl和sr,以及它们的偏差Δs=sr-sl。
然而,在吊具升降运动过程中,假设两侧缠绕的钢丝绳总长度的差值Δs0保持不变,即有如下关系式:
sr-sl≡Δs0
(9)
将式(5)代入式(9)有:
R(θr-θl)+r(θr+θl)+|BD|cosθr
(10)
R(θr-θl)+r(θr+θl)
(11)
当滑轮之间的距离L和l,滑轮半径R和r为常数时,由式(3)、(4)和(11)可以求得在任意高度yE处,钢丝绳混合卷绕模型的吊具在水平方向上的零位xE,即零位补偿量为:
xE=f(yE)
(12)

(13)
4 吊具零位补偿仿真测试
在仿真实验中,假设滑轮之间的距离L=5.0 m和l=1.2 m,滑轮半径R=0.6 m和r=0.4 m,利用公式(5)~(8)可以计算吊具在yE处保持中间零位时,左、右侧滑轮组中的钢丝绳总长度sl和sr(见图4),以及它们的偏差Δs=sr-sl(见图5)。
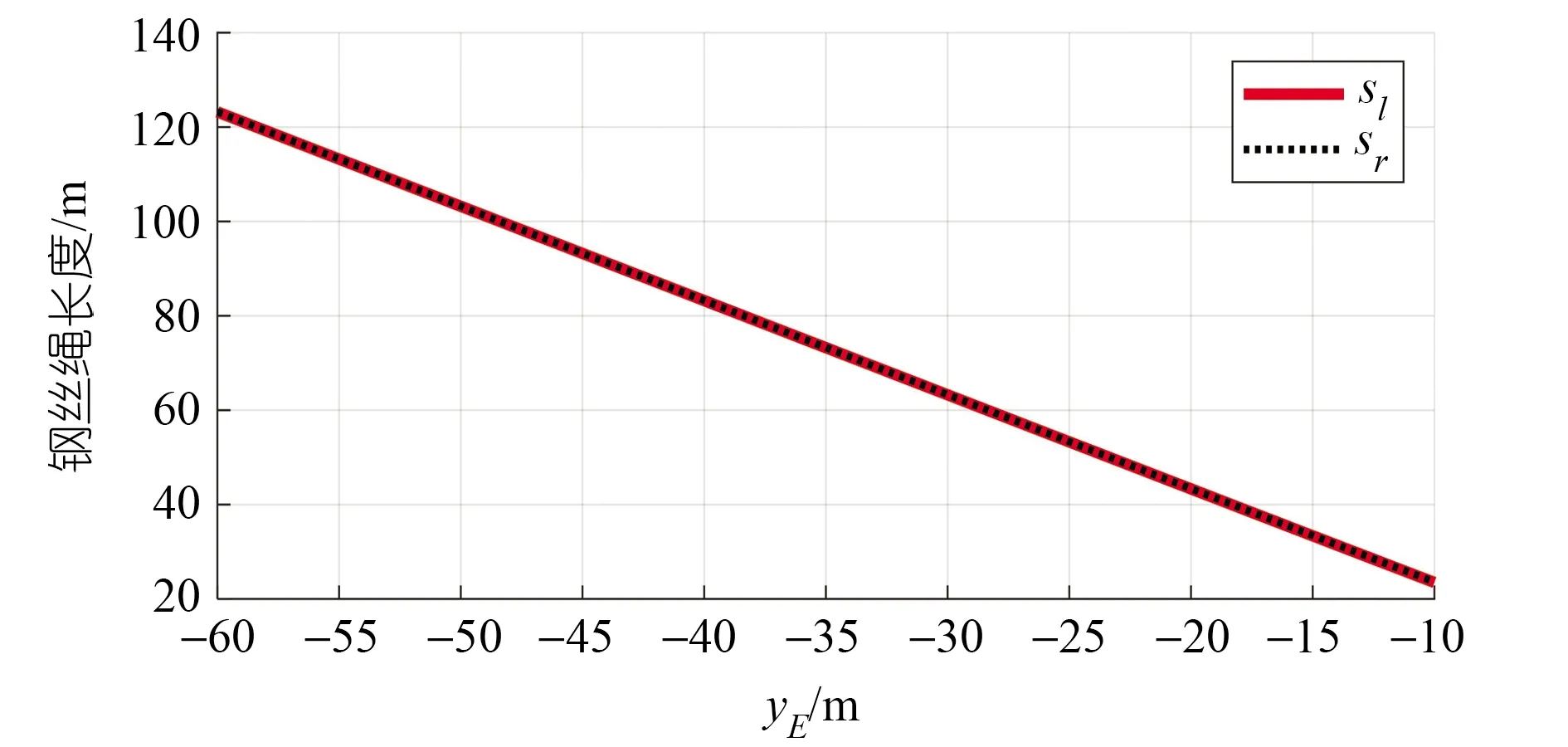
图4 吊具保持中间零位的钢丝绳总长度

图5 吊具保持中间零位的左右钢丝绳总长度差
从图4和图5中结果可以看出,吊具在任意yE处保持中间零位时,左、右侧滑轮组中的钢丝绳总长度sl和sr随吊具高度的增加几乎呈线性减小,它们之间的长度差Δs随吊具高度的增加而增大,并表现出了非线性特性。

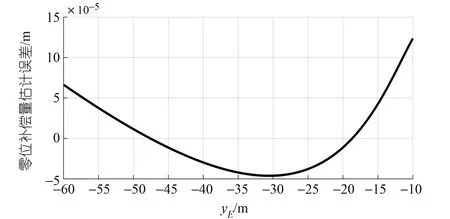
图6 吊具在水平方向上的零位补偿量的估计误差
5 结语
集装箱起重机在进行自动化作业时需要对吊具的零位进行检测,在不计吊具偏载引起的吊具旋转的情况下,提出了一种基于钢丝绳缠绕模型的吊具零位补偿计算方法,通过计算吊具在不同起升高度时对应的水平偏移值,给出补偿量,消除水平偏移。仿真实验结果表明,该方法满足集装箱码头实际作业中对吊具零位补偿的需求。
