隧道内车辆交通事件智能检测技术综合应用
2022-07-06杨羚谢斌党倩
杨羚 谢斌 党倩
华设设计集团股份有限公司 江苏省南京市 210005
随着建设技术水平的提高和社会经济的快速发展,我国公路隧道建设取得了巨大的成就,已成为世界上隧道数最多、技术最复杂、发展最快的国家,但由于隧道特殊的环境,导致车辆行驶过程中容易发生交通事件。单一的技术手段难以应对多种多样的交通事件,为此,本文采用视频、多目标雷达和光纤振动传感设备,随隧道内车辆行驶全过程中的交通事件进行实时检测,保障车辆在隧道内安全通行。
1 隧道交通事件检测类型
《视频交通事件检测器》(GB/T28789-2012)标准中将公路领域视频方式交通事件检测内容定义为停止、逆行、行人、抛洒物、拥堵、机动车驶离六项内容。考虑到隧道为单向行驶通道,逆行现象发生概率较少,因此本文不对逆行现象进行检测。此外,隧道内机动车驶离的表现方式一般为违规变道,因此需增加对违规变道的检测。同时,由于隧道“黑白洞效应”的影响,驾驶人员在隧道出入口附近对车辆行驶速度的控制感降低,导致超速或缓行现象时有发生,故增加对超速和缓行的检测。
综上,本文对隧道交通事件检测划分为7 项,如表1 所示。
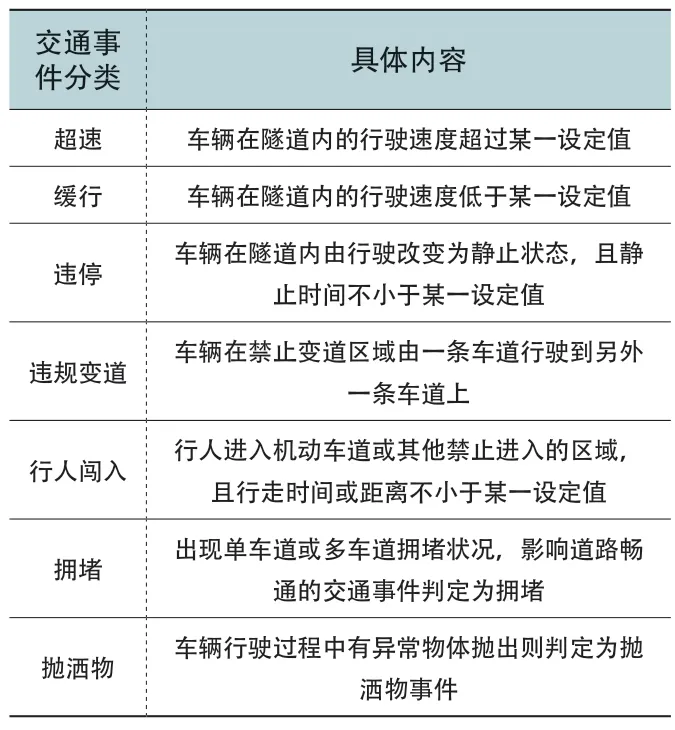
表1 隧道交通事件分类
2 智能感知设备综合检测方法
在对隧道常发交通事件分析研究基础上,根据各智能感知设备特性及其与各类交通事件的契合度,提出不同交通事件的检测设备与方法。
2.1 基于光纤振动技术的交通事件检测
光线振动技术能够通过接受到的光脉冲的信号强弱判断是否发生异常情况。通过采集车辆行驶产生的地面振动信号,获得较为精确的行车速度、方向、位置等交通数据,进而检测超速、缓行、违停等与车辆速度异常相关的交通事件。光纤振动感知技术原理如图1 所示,部署装置示意图如图2 所示。
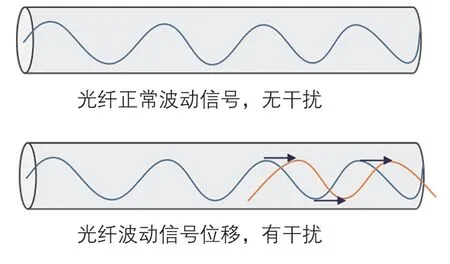
图1 光纤振动传感技术原理图
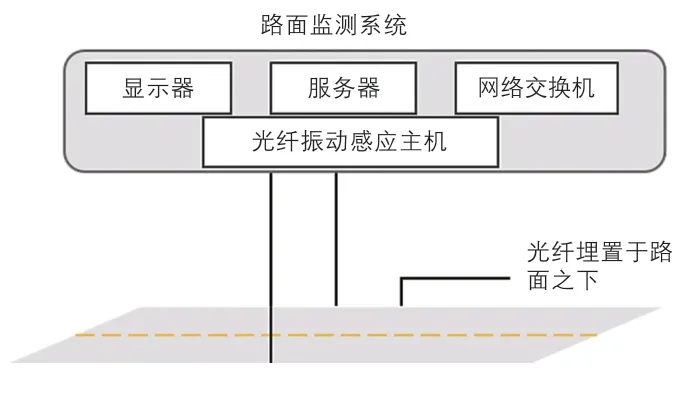
图2 光纤振动传感系统部署示意图
2.2 基于多目标雷达与视频相结合交通事件检测
多目标雷达和视频相结合的检测方式对车辆违规变道、行人闯入、抛洒物等事件检测作用显著,雷达与视频联合检测工作原理如图3 所示。
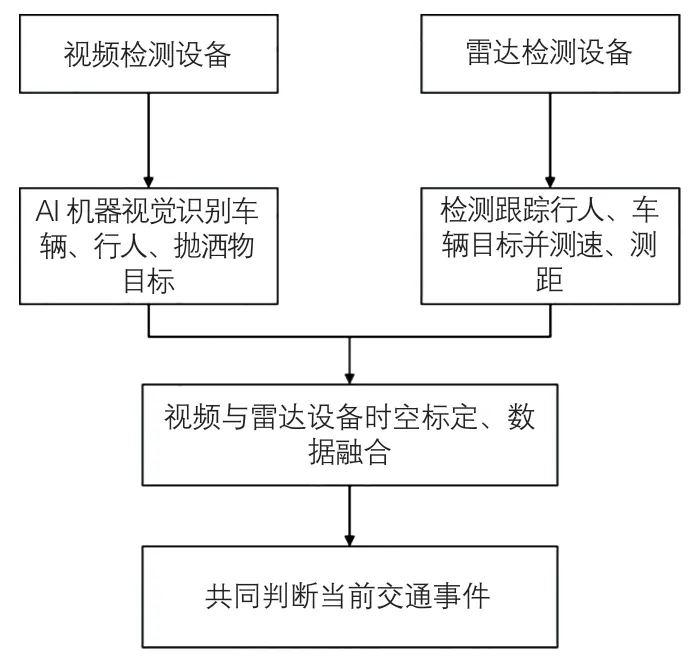
图3 雷达与视频联合检测工作原理图
对于车辆违规变道,既需要检测车辆速度变化,又需要跟踪车辆目标。采用雷达与视频联动技术,一方面雷达设备能够检测出车辆目标位置、速度信息,另一方面视频设备结合AI 深度学习算法能够检测车辆精细化特征,解决单纯雷达丢失、混淆跟踪车辆目标的问题,进而实现较为复杂的车辆变道事件检测。
对于行人闯入,通过视频设备,结合AI 机器视觉识别行人及动作行为具有较高的检测精度,辅助雷达跟踪检测行人运动轨迹及运动速度,解决单一检测方式存在误报率高的问题。
对于抛洒物事件,结合雷达与视频设备桩号即可提供由于抛洒物导致的交通拥堵事件发生的地点。结合YOLOv4 等深度学习方法,即能有效区分车辆与抛洒异物目标。
2.3 基于多目标雷达跟踪技术的交通事件检测
由于单纯的视频检测方式,易受到大型车辆遮挡造成交通量统计不精确的问题。本文提出利用多目标雷达进行车辆跟踪检测,可有效避免固定视频检测方式难以解决的车辆遮挡问题,特别适用于交通拥堵等事件的检测。
给隧道内通行的每个车辆赋予1 个ID识别码,隧道单个行车道每隔500 米设施多目标雷达检测设备。通过多目标雷达全程记录车辆的运行轨迹,对雷达波进行解算获取交通流量、时间占有率、车行速度等信息,从而通过数据分析模拟出实时交通动态,进而判断是否发生交通拥堵事件。其检测示意图如图4 所示。
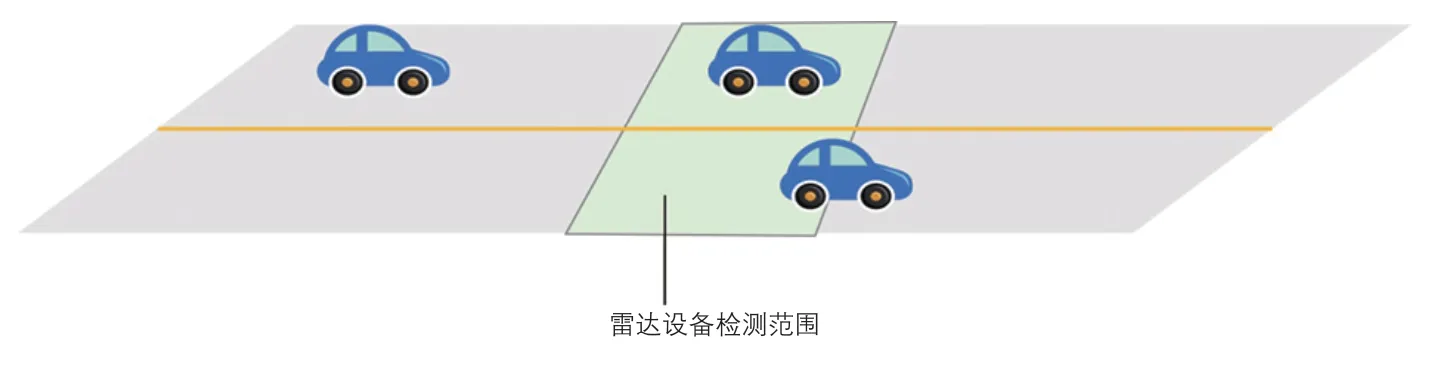
图4 多目标雷达交通拥堵事件检测示意图
3 结论
本文着眼于对车辆通过隧道全程的检测及跟踪,针对单一视频检测技术手段存在监控盲区、误报率高等问题,研究适用于隧道交通事件智能检测方法,采用多种前沿技术与设备相互融合、相互补充、协同运行的技术方案,对隧道内的车辆通行情况进行全天候、全天时、全方位的捕获,显著提高检测精度和实效性。