关于盲区监测系统中外标准的对比
2022-07-06黄宏周波邵科君
黄宏 周波 邵科君
1.杭州吉利汽车有限公司 浙江省杭州市 310000 2.浙江吉润汽车有限公司宁波杭州湾分公司 浙江省宁波市 315000
1 引言
我们都知道车辆在正常行驶过程中由于驾驶姿态及车辆结构等原因,存在无法直接观察到的区域。常见的做法是在车辆前部增加III 类、IV、V 类后视镜来拓宽视野。但依然无法保证驾驶员在驾驶车辆过程中时刻能观察到所有路况,尤其是大型运输卡车。据相关统计数据表明,由于驾驶盲区的存在每年都有数以万计的事故发生。随着近几年汽车新技术的发展应用,尤其是智能网联汽车的逐渐商业化,越来越多的汽车通过给车辆配置盲区监测系统来提示驾驶员在盲区内存在影响驾驶安全的车辆或者行人。盲区监测系统,简称BSD,通过摄像头、毫米波雷达等车载传感器检测视野盲区内有无来车,在左右两个后视镜内或其他地方提醒驾驶员后方安全范围内有无来车,从而消除视线首区,提高行车安全性。
由于BSD 系统尚属于区别于传统汽车的新技术,目前关于该技术的标准尚未强制,但不妨碍本文从标准的角度展开分析,本文将国标GB/T 39265-2020 道路车辆 盲区监测(BSD)系统性能要求及试验方法与联合国欧洲经济委员会(UNECE)标准R151-Uniform provisions concerning the approval of motor vehicles with regard to the Blind Spot Information System for the Detection of Bicycles 进行对比分析,研究国内外标准BSD 系统的技术要求以及进行标注差异性分析。
2 适用范围
R151 适用于GVW 大于8 吨的N2 以及N3 类车辆,但GVW 小于8 吨的N2 类、M2、M3 类应制造商要求也可适用此标准。且该标准中要求BSD 系统工作时的车辆速度区间一般在5km/h~30km/h,环境照明条件超过15Lux。由此可以看出,该标准侧重点是要求在大型车辆的视野盲区内即将出现骑自行车人的轨迹时要进行预警。与之不同的是,GB/T 39265-2020 适用于安装有BSD系统的M、N 类车辆,适用范围比R151 更宽泛,国内的标准体系中已将M1、N1 类车辆纳入覆盖范围内。标准的技术要求中不仅包含大型车辆,对M1、N1 类小型车辆的视野盲区内即将出现的其它类型车辆轨迹也要进行预警。标准的相同点都是二者是要求装必符,均是不强制的标准。

图1 标准目录对比
3 技术要求
3.1 GB/T 39265-2020 盲区监测功能警告要求
a) 左侧盲区警告要求——按规定进行直线行驶工况试验,当目标车辆处于以下条件所列范围内时系统应发出左侧盲区警告:目标车辆的任何部位位于B 线前面、完全位于C 线后面、完全位于F 线的左侧、任何部位位于G 线的右侧。如果目标车辆任何部位均未处于A.D.E 和H 四条直线交叉覆盖区域内,则不应发出左侧盲区警告。
b)右侧盲区警告要求——按规定进行直线行驶工况试验,当目标车辆处于以下条件所列范围内时系统应发出右侧盲区警告:目标车辆的任何部位位于B 线前面、完全位于C 线后面、完全位于K 线的右侧;任何部位位于L 线的左部。如果目标车辆任何部位均未处于A、D、J 和M 四条直线交叉覆盖区域内,则不应发出右侧盲区警告。
c)系统反馈时间——从目标车辆进入盲区监测范围到系统发出警告的时间应少于300ms。
d)可选盲区警告抑制——如果试验车辆正在超越目标车辆,且目标车辆从前方进入了监测范围,则可将盲区警告抑制一段时间,警告抑制时间不应大于2s。
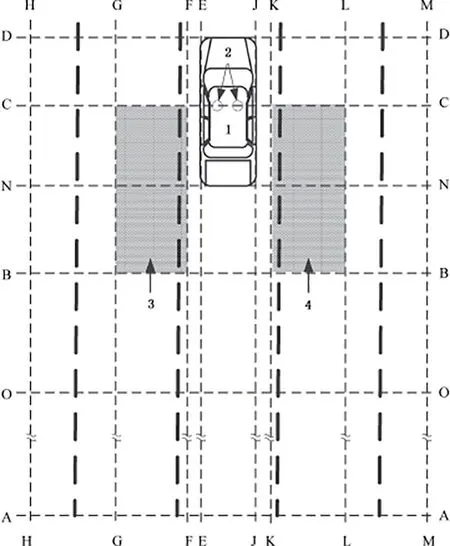
图2 M1/N1 类车辆盲区监测范围
3.2 GB/T 39265-2020 直线行驶工况下试验
1)目标车辆识别试验,如图3 所示。速度:试验车辆:40,目标车辆55,从侧后方同向超车,进入范围时,BSD 系统开始警告,时间上不晚于后车前部超过C 线,前部超过C线时,试验结束。

图3 目标车辆识别试验
2)直线道路并道试验,如图4 所示。
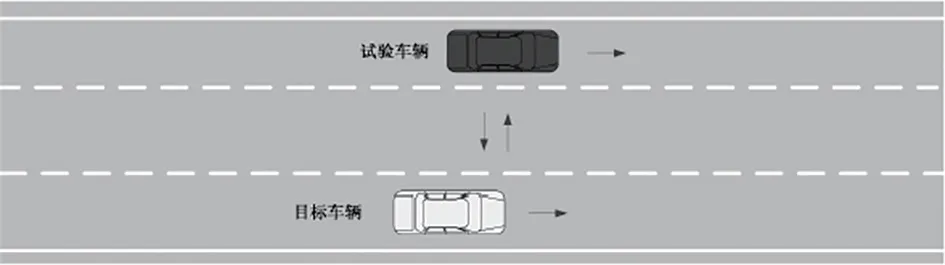
图4 直线道路并道试验
3)直线道路目标车辆超车试验,如图5所示。
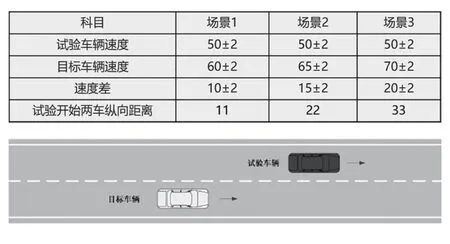
图5 直线道路目标车辆超车试验
4)目标车辆变道超车测试,如图6 所示。

图6 目标车辆变道超车测试
5)直线道路双目标车辆超车,如图7所示。

图7 直线道路双目标车辆超车
2) 直线道路并道试验
速度:试验车辆:50,目标车辆50,横向距离为6 到7m。当目标车辆越过所示B 线,完全在C 线之后时,从侧后方开始变道,横向速度0.25~0.75m/s,直到二者横向距离为1.5m。变道完成后,确保目标车辆仍然越过B 线并且完全在C 线之后,目标车辆至少保持直线行驶300ms,然后变道返回最初车道线,试验结束。当目标车辆整体到H 线或M 线外时,BSD 系统不能发出警告,当进入盲区时,BSD 系统应发出警告,时间上不得晚于目标车辆外缘穿过L/G 线后300ms。
3)直线道路目标车辆超车试验
速度:50,横向距离:1.5m,速度高于试验车辆,详见下表。当后车前缘超越前车C 线3m 时,试验结束。当后车接近前车时,盲区监测系统BSD 要求如下:整体都在所示A 线之后时,不应发出警告,进入盲区时,BSD 系统应发出警告,时间上不得晚于后车前缘穿过B 线后300ms。
4)目标车辆变道超车测试
速度:前车50,后车60,同车道行驶。开始时,二车距离大于20m,当后车接近前车B 线10m 时,从侧后方变道,变道速度0.55~0.85m/s,与前车横向距离1.5m,当后车前部超过前车C 线3m 时,试验结束。当后车进入盲区时,BSD 系统应发出警告,发出时间不得晚于后车外缘穿过B 线或F 线后300ms。
5)直线道路双目标车辆超车
速度:前车50,后车60,横向距离:1.5m。开始试验时,后车与前车B 线距离超过11m;当后车前部超越前车C 线3m 时,试验结束。当后车进入前车的盲区时,BSD系统应发出警告,发出时间不晚于后车前缘穿过B 线后300ms.
3.3 GB/T 39265-2020 M2、M3、N2、N3 类车辆右转盲区警告要求
按规定进行转向行驶状态试验,在试验车辆右转、目标车辆直线驶入KCSB 围成右转盲区监测区域的过程中,当试验车辆前缘到达描述的最晚警告线R 线时,盲区监测系统应发出警告。
3.4 GB/T 39265-2020 M2、M3、N2、N3 类车辆右转盲区测试
使用标记线和自行车假人按照规定的试验设施布置、尺寸参数建立一个车辆右转盲区监测报警测试场景。将试验车辆和自行车假人从各自的起始位置按照规定的试验车速进行测试,试验要求试验车辆前缘在通过Q线的同时自行车假人通过P 线,试验车辆在规定车速向右转向,朝设定的碰撞点行驶。自行车假人以规定的速度,至少保证自行车假人车速稳定8s 以上,沿着规定的路线向预定的碰撞点移动。当试验车辆前缘穿过R 线时,盲区监测系统应发出警告。300ms 后结束试验。根据规定的参数,重复上述试验,验证M2、M3、N2、N3 类车辆盲区监测系统性能。
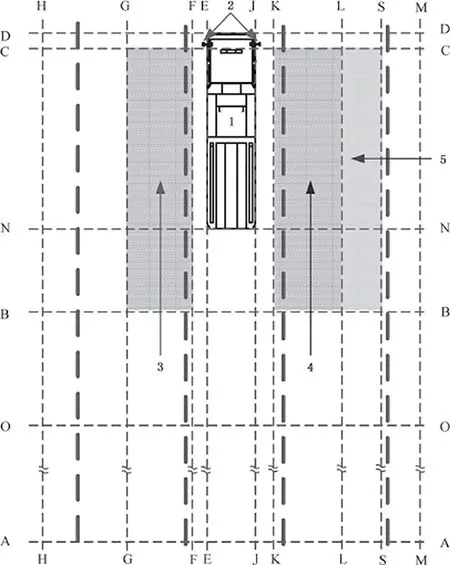
图8
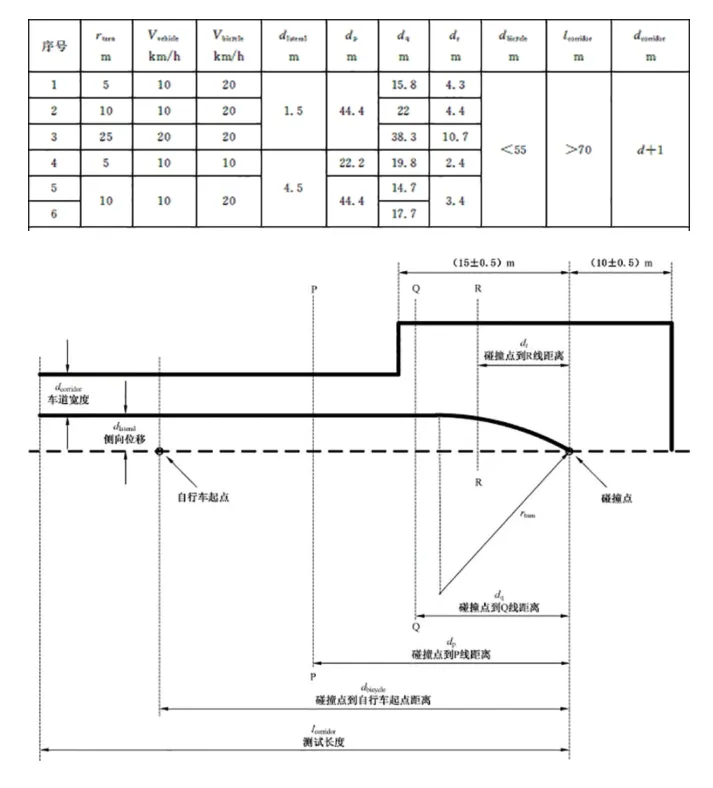
图9 车辆右转盲区测试场景
3.5 R151 盲区监测系统动态测试
使用锥体和自行车假人布置测试场景,见下图。标记自行车假人起始点,并在通道入口放置交通信号灯,驾驶车辆通过通道,驾驶过程中不要使用转向灯。操作假人以规定速度稳定行驶,当假人正好跨越A 线时,B 应正好跨越B 线。当车辆跨越C 线时,观察盲区监测系统信号是否被激活,当车辆跨越D 线时观察盲区监测系统信号是否关闭。在通过交通标志和任何锥体时,只要自行车假人仍然静止,确认盲区监测系统信号没有被激活。按照下表速度重复以上步骤进行测试。

图10 盲区监测系统动态测试
3.6 R151 盲区监测系统静态测试
a).静态测试1:如图示,车辆处于静止状态,使自行车假人以5km/h 速度沿垂直于车辆纵向中心面方向在距离车辆最前端1.15m 距离朝车辆行驶。当自行车假人距离车辆2m 时,如果盲区监测系统信号被激活,则测试通过。
b).静态测试2:如图示,车辆处于静止状态,使自行车假人以20km/h 速度沿平行于车辆纵向中心面方向距离中心面2.75m 向前行驶,自行车假人在超过距离车辆最前端距离44m 后就要以稳定速度直至通过车辆最前端。当自行车假人距离车辆最前端7.77m时,如果盲区监测系统信号被激活,则测试通过。

图11 盲区监测系统静态测试
3.7 R151 故障检测测试
可以通过断电等方式模拟盲区监测系统发生故障,当故障报警信号被激活且以规定的方式进行提示驾驶员,且只要故障存在,车辆上电时,故障报警信号就不能消失。则测试通过。当盲区监测系统感应装置被雪、冰、泥水等物质弄脏时,盲区监测系统应能自动停止工作,当雪、冰、泥水等物质被移除后,车辆上电时,盲区监测系统应能复位工作,自动复位时间不超过车辆上电后60s。
4 综合分析
通过对GB/T 39265-2020 与R151 的适用范围、技术要求、测试要求等进行对比,不难发现,国标适用范围更广泛,对小型车辆提出更多的要求。即使同样对于M2、M3、N2、N3 类车辆来说,虽然测试场景布置类似,但国标针对中国大型车辆的使用场景及常见工况还是做出了不同的规定。国内主机厂家要针对目标市场要求对销售车辆做出适应性调整。