一种高精度时频信号同步系统
2022-07-06张林华
张林华
(中国电子科技集团公司第五十一研究所,上海 201802)
0 引言
在信号测量时频应用系统中,如何建立各测量站间时频信号的同步,提升信号同步精度和稳定度,是系统设计必须关注并解决的核心技术问题。时频信号应用系统通常有主从同步和本地同步2种方式。主从同步工作方式受制于使用空域、站间信号传输设备、传输网络、系统成本等因素的影响,限制了系统的应用范围,降低了站间时频信号的同步精度。本地同步方式解决了主从同步的不利因素,系统同步精度主要受制于各测量站时频设备产生的同步信号间的同步精度和设备成本。本文设计了一种高精度时频信号同步系统,采用通用化、低成本、平台化的硬件,融合软时统技术,以无通信共视技术和时频生成技术为核心,集成高精度GNSS 接收机,可接收BD(B1、B2、B3C)、GPS(L1、L2C)、GLONASS(L1、L2)等多频点卫星信号,实现多路高精度1 PPS、10 MHz标频信号、B(DC)码等时频信号输出,实现时频信号测量系统中各测量站间信号测量的高精度同步和标频信号的稳定。
1 高精度时频信号同步系统
本高精度时频信号同步系统在各信号测量站配置单一的时频信号同步设备,各时频信号同步设备接收BD/GPS/GLONASS卫星信号,以高精度时频单元为基础,将自主创新的软时统技术平台与卫星同步技术、高稳驯服技术、多参考无损切换技术、时频综合技术、高精度守时技术以及时频生成技术进行结合,为各时频信号测量站提供1 PPS同步脉冲、10 MHz标频信号、B(DC)码、网络时间协议(NTP)等系统应用需求信号输出。通过采用独有的卫星共视算法技术,实现各时频信号测量站间信号测量的高精度同步。系统架构框图如图1所示。
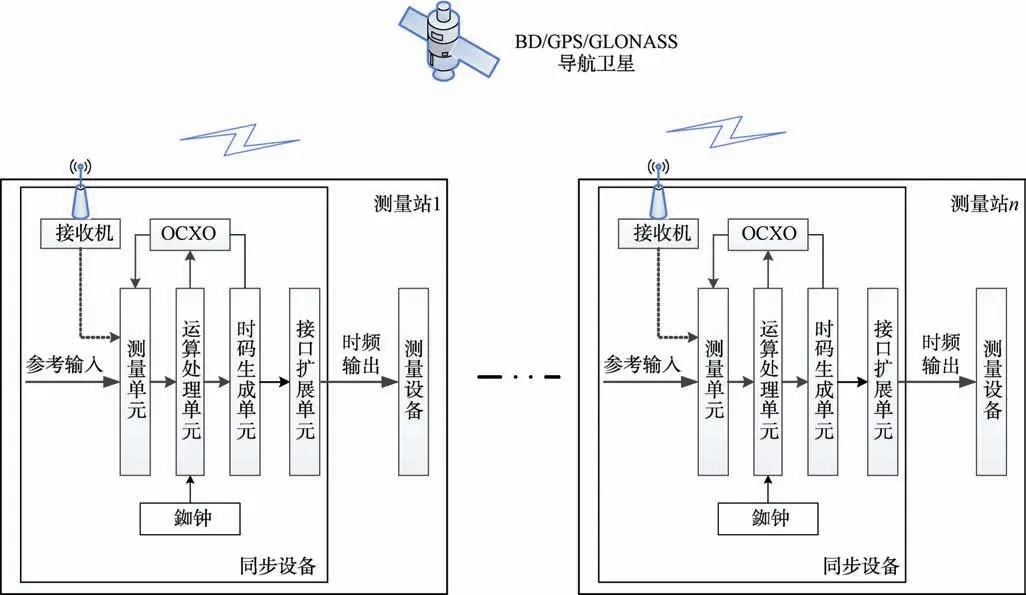
图1 高精度时频信号同步系统架构框图
系统按需求预置接收的卫星信号(BD、GPS、GLONASS),接收导航授时信息,恢复时间消息(TOD)和参考1 PPS作为参考信号,测量单元采用软硬件结合的方式实现高精度的频差和相差测量。通过运算单元对晶振老化特性、温度特性进行分离补偿,准确地滤波及分析数据噪声情况,选择合适的环路带宽,保证高精度时间同步和高稳低噪频率同步,实现智能驯服恒温晶振。系统内置恒温晶体振荡器(OCXO),当外参考有效时,根据驯服期间的温度和压控数据,可智能分离晶振温度和老化特性;若外参考无效,则对OCXO 进行精准补偿,进而达到高精度守时。同时将驯服产生的高稳的OCXO 100 MHz频率和1 pps作为基准,通过时码生成单元产生B码和其它串行时间码,结合时频综合技术生成高精度的10 MHz 标频信号和1 PPS 同步脉冲信号。
1.1 时频信号同步设备硬件设计
时频信号同步设备由GNSS测向接收机、高精度时频测量单元、接口扩展单元、高稳定銣钟等功能模块组成。硬件架构组成如图2所示。
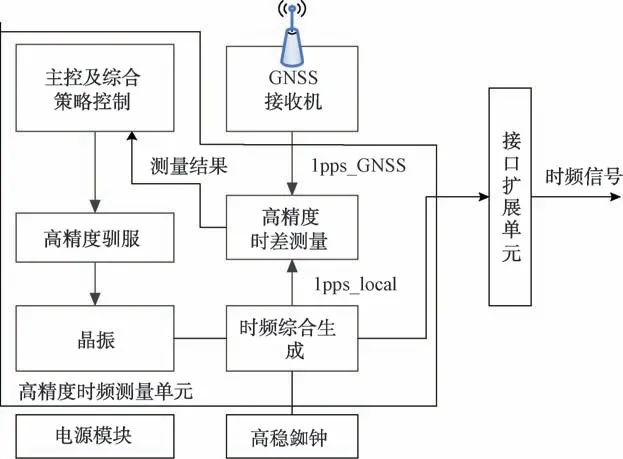
图2 时频信号同步设备硬件架构组成框图
GNSS测向接收机和高精度时频测量单元是时频信号同步设备的架构核心,当GNSS测向接收机接收BD、GPS、GLONASS卫星导航授时信息时,系统可凭借载波相位观测及导航定位算法,产生1 PPS、海运事业无线电技术委员会(RTCM)标准协议差分串行数据、定位数据。高精度时频测量单元同时兼具接收卫星信号和外参考GNSS源功能,通过测量GNSS测向接收机恢复的参考1 PPS与铷钟Ru_10 M 之间的相差,驯服控制銣钟,将銣钟的Ru_10 M 与高精度时频测量单元上的10 MHz OXCO 进行驯服,实现驯服锁相回复输出产生本地高精度的1 PPS、高稳低噪的10 MHz标频信号、B(DC)码和NTP等时码及频率信号。各模块与高精度时频测量单元通过内部CAN 总线进行有效链接,单元模块之间独立性强、耦合度低,可根据系统的不同应用需求配置不同的接口扩展输出模块,具备输出可扩展性;同时高精度时频测量单元通过内部的CAN 总线对各功能扩展模块进行访问监测,具有极高的通用性,增加了系统的适用性。
1.2 时频信号同步系统软体设计
时频信号同步系统以软时统技术平台为基础,采用模块化设计,主要包括信号处理、驯服和守时、时码输出、设备管控等功能软件模块。
信号处理功能软件模块主要包含时源的有效性判断,时间跳变侦测、时源信息更新和时源状态上报。
系统采用“动态环路带宽技术”,使其具备高精度的频率源(铷钟、晶振)驯服功能,同时融合“增量式比例积分微分(PID)自动控制”算法,完成对频率源高精度驯服。针对GNSS 卫星信号外部时源参考源和温度对铷钟的短稳、长稳产生影响这一问题,可在系统内部预建立对应的PID 参数列表,预设相应的环路带宽控制参数。根据驯服过程压控数据变化情况、跟踪锁定相位情况及时间参量,可智能判定环路带宽适宜性,从而自动增减环路带宽。同时系统利用增量式PID 控制算法完成高精度驯服,有效降低驯服对本振稳定度的影响,成功实现时源跟踪驯服。
增量式PID 算法的基本原理如图3所示。
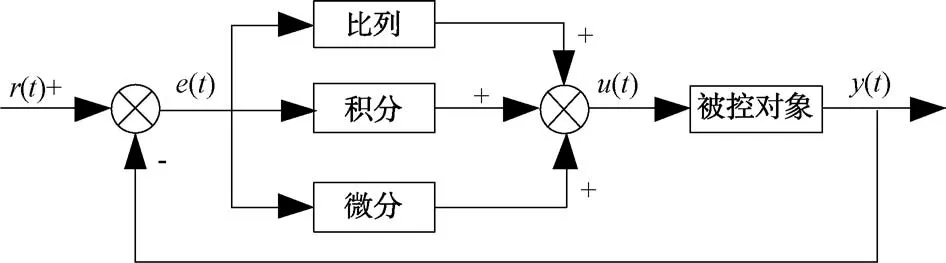
图3 增量式PID 算法原理图
增量式PID 算法公式如下:

式中:e表示本次相差;e表示上一次相差;K、K、K分别表示比例、积分、微分控制系数;Δ表示本次压控调节增量。
2 系统性能测试验证
2.1 10 MHz信号输出验证
10 MHz标频信号输出相噪指标测试验证见图4,短稳指标测试验证见图5,10 MHz标频信号输出相噪和稳定度测试结果见表1。

图4 10 MHz相噪指标测试
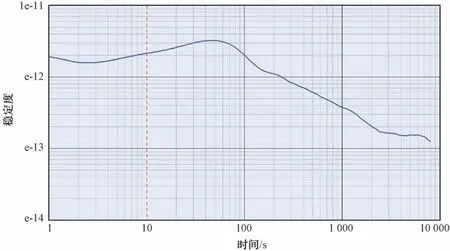
图5 10 MHz短稳指标测试

表1 10 MHz相噪和稳定度输出测试表
2.2 同步精度测试
在4个测量站组成的时频测量系统中,对4套设备进行同步精度测试,测试结果见表2,测试验证见图6。

图6 同步精度测试验证

表2 同步精度测试表
3 结束语
本高精度时频同步系统经过多项目实际应用验证,10 MHz 标频信号的稳定度从10提高到10,站间的时间同步精度从50 ns提升到6 ns,远优于同类时频信号同步设备。该设备具有广泛的应用前景和相当高的应用性价比。