基于分水岭算法分割的钢渣层厚度计算
2022-07-05张笑源刘堂友于符婷
张笑源, 刘堂友, 于符婷
(东华大学 信息科学与技术学院,上海 201620)
0 引言
在RH脱气精炼法中[1-4],浸渍管固定在钢包上方,钢包需要顶升至合适的高度以进行有效的脱气反应。为了防止钢包内钢液接触到外部空气发生氧化,在钢包进行顶升之前会向其中添加抗氧化剂以隔绝外部,保证底部钢液的稳定。浸渍管需要在钢包顶升后,双管透过钢液表面的钢渣层才能使其下端接触到钢液,若浸渍管插入过浅,则会导致浸渍管下端停留在钢渣层,造成吸渣事故。
在RH精炼工艺中,对于钢渣层厚度的判定是试探性的,钢包需要顶升至上方浸渍管中,待接触一段时间后钢包下降。钢液层和钢渣层温度不同,会在浸渍管外部留下不同颜色的印记,根据钢渣接触区的厚度进而推出钢渣层的厚度。传统的判定多由经验丰富的工人用人眼观测,但刚接触过钢液的浸渍管外部亮度极高,不仅对人眼伤害大,且会造成观测结果不准确。
考虑到机器视觉自动化、非接触的优点,可以在浸渍管侧俯位置安置工业相机,对浸渍管外部信息进行拍摄。具体做法为:首先在相同位置使用工业相机先后获取浸渍管外部不同曝光程度图像;利用最大类间方差法(OTSU)二值化算法对两类曝光图片进行目标区域的提取;然后利用基于距离变换的分水岭分割方法对上述二值图像的语义主体进行提取,使得目标内容不含有小连通区域;最后对目标内容下边缘进行采样,得到多组采样点,对其进行垂直移动,并停止在上边缘;记录多组像素距离并进行加权平均,从像素距离进行真实距离映射,最终得到钢渣层的厚度。
基于分水岭分割的钢渣层厚度计算方法的流程图如图1所示。
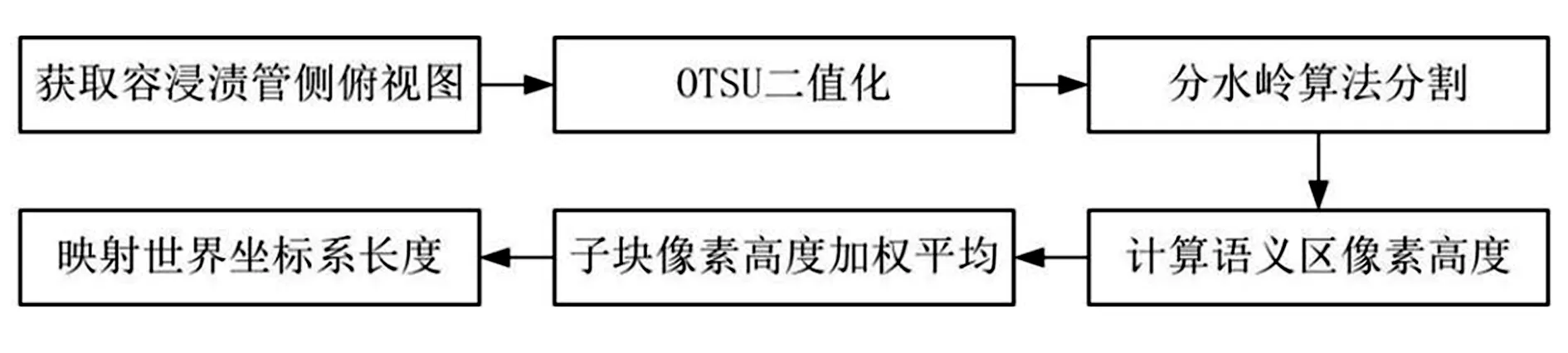
图1 基于分水岭算法分割的钢渣层厚度检测流程
1 钢液温度对浸渍管外部影响
当浸渍管浸入到钢包内的钢渣层和钢液层中时,由于二者的温度不同会在浸渍管外表面留下不同亮度和不同颜色的印记。由于钢渣层在钢液层的上部,故当浸渍管第一次从钢包中脱离后,其表面会呈现冷区、钢渣接触区、钢液接触区三种不同特性的分层。
由于防氧化剂投入的量和浸渍管插入到钢液下的深度未知,三者厚度在任意一次的RH工序中都是不固定的。根据现场光强和前后景亮度差别综合对工业相机的快门时间、光圈大小和ISO(感光度)进行考量,设置高低参数对浸渍管外部进行拍摄。图2为对选用浸渍管进行高曝光量和低曝光量拍摄结果。

图2 高、低曝光对浸渍管同时拍摄结果(a) 高曝光量拍摄结果; (b) 低曝光量拍摄结果
2 基于阈值选取分割
单一图像的像素灰度值可由固定阈值分为两类,选取合适的阈值对目标图像进行处理是最简单的分割方法。OTSU是一种广泛使用的阈值选取法[5],其根据图像中前景和背景的灰度差别分割二者,当前景与背景的类间方差最大时选取阈值,可以得到最佳的分割结果。
设置阈值为t,将图像所有像素分为前后景两类Co和Cb,这两类像素的均值为m1、m2,则OTSU的类间方差公式表示为:
σ2=P(Co)P(Cb)(m1-m2)2
(1)
上式中,P(Co)、P(Cb)分别为Co和Cb两类像素的概率大小。阈值在图像前景和后景像素之间的类间方差σ2取到最大值时选取,此时阈值可表示为:
t=argmax{σ2}
(2)
基于OTSU阈值分割对浸渍管高低曝光图像的处理结果如图3所示。
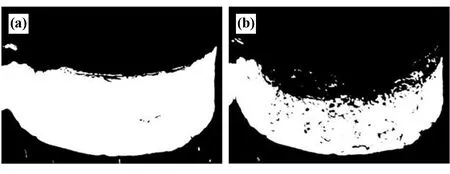
图3 基于OTSU的阈值分割结果(a) 高曝光分割结果; (b) 低曝光分割结果
从上图可以看出,由于在图2(b)中呈现出的钢渣粘连,图3(b)的语义区内含有许多小连通区域;同时,在其语义区外,也出现了许多噪团和噪点。基于OTSU算法对浸渍管高低曝光量图片的分割结果如表1所示。

表1 基于OTSU算法对浸渍管高低曝光量图片的分割结果分析
3 融合分水岭图像分割
上述OTSU阈值分割图像中的语义区域内外有较多的小连通区域,需要减弱或消除其影响。选取上节分割结果为处理对象,应用融合分水岭算法[6-10]对其进行进一步处理,其处理过程如图4所示。

图4 融合分水岭图像分割的处理过程
图5为使用融合分水岭算法对图3分割图像的再处理结果。
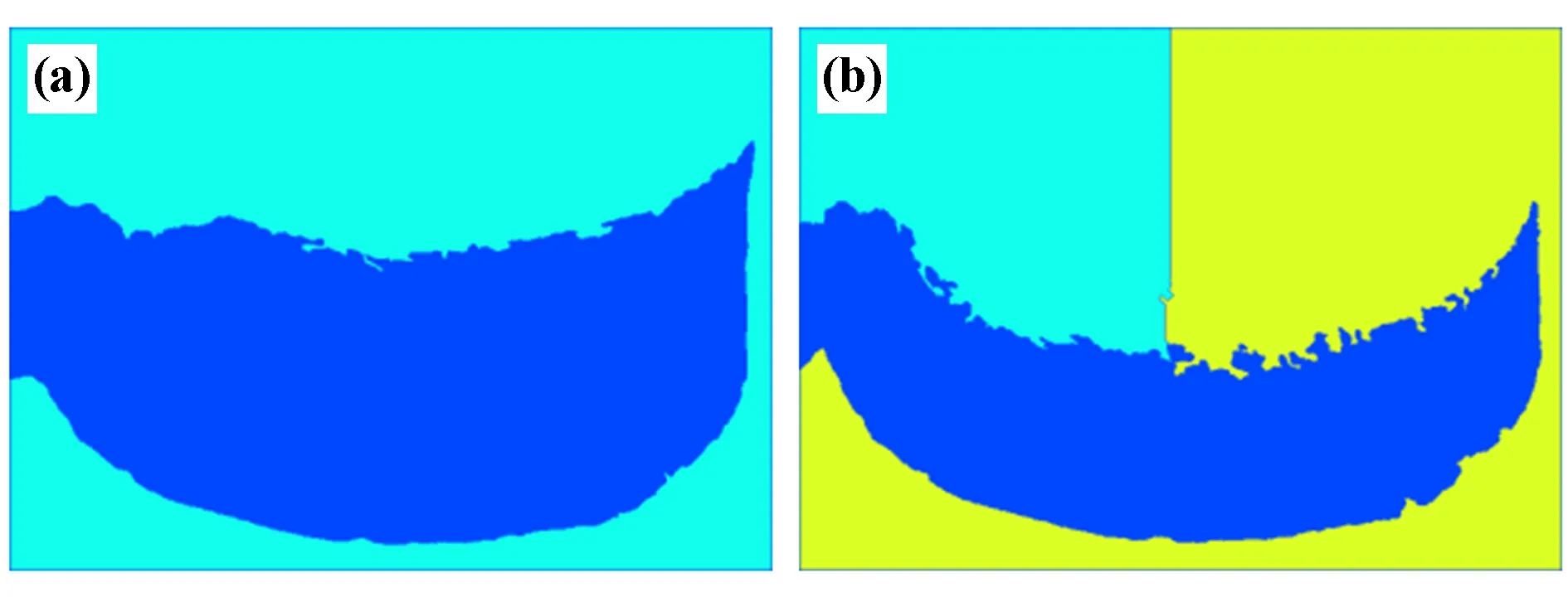
图5 高、低曝光图像特征区提取结果(a) 高曝光量分割结果; (b) 低曝光量分割结果
图5中中间的蓝色区域为目标分割块。可以看出原本语义内部的小连通区域与外部的毛刺被不同程度地消除,由此可以得出两个完整目标语义区。上述处理结果中只需要关注目标区域的处理,提取出上述分割结果中目标区域的语义内容和边缘,如图6所示。
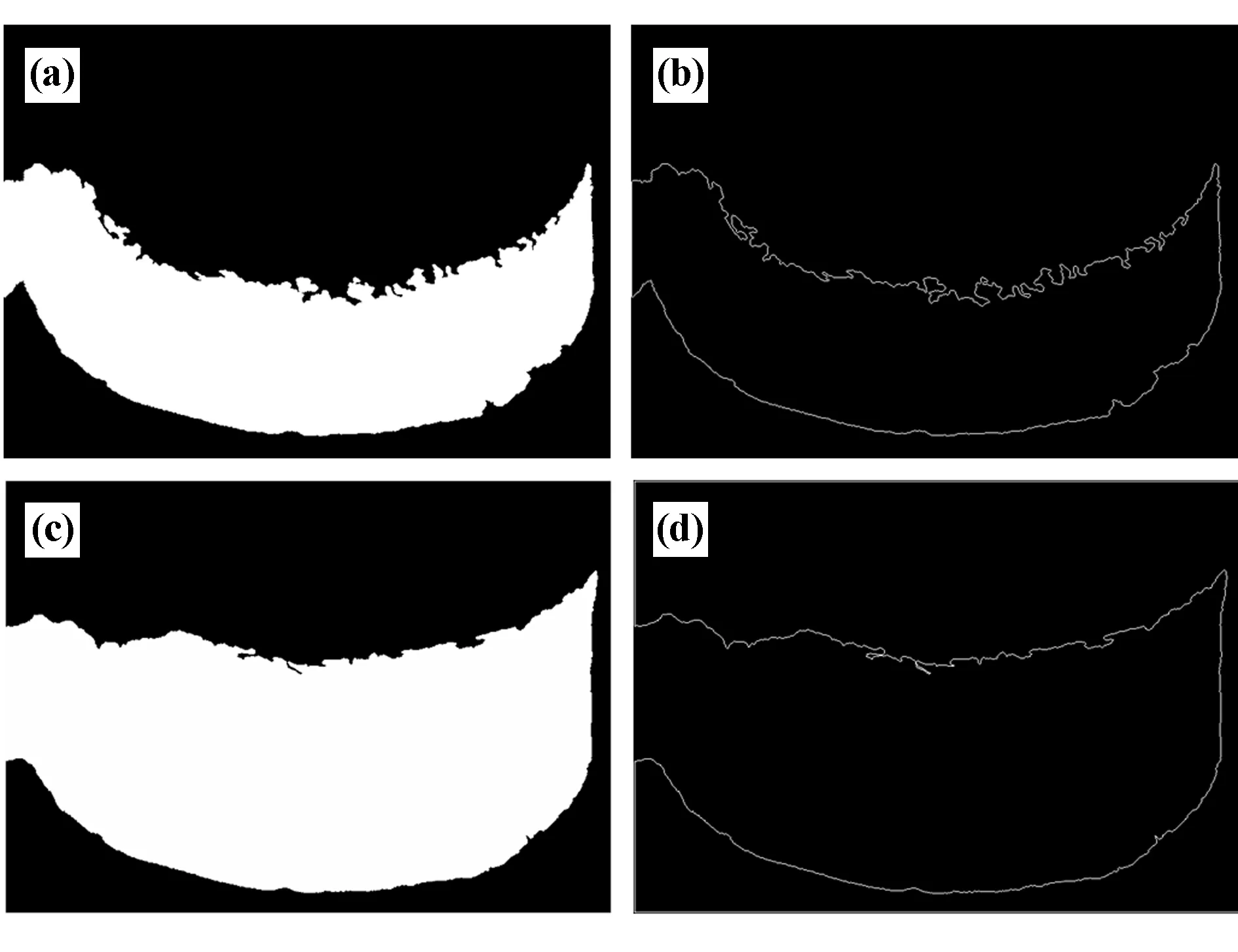
图6 两类图像关注区域和轮廓边缘(a) 低曝光量内容; (b) 低曝光量边缘; (c) 高曝光量内容; (d)高曝光量边缘
由两类图像目标区域和轮廓边缘图可以看出,相对于传统分割算法,经过分水岭算法的语义分割之后,其目标处理区域和目标区域周边的小连通区域都被消除,只保留了其语义整体,为后续测量其轮廓尺寸降低了前提条件。
4 语义边缘垂直像素高度
从上述语义边缘可以看出,二者显示的是浸渍管在高曝光和低曝光情况下高光区域的轮廓。两者在像素坐标系竖直方向上的高度差即为浸渍管接触到钢渣层的中间层厚度信息。设高曝光特征区域竖直方向上的高度为H1,低曝光特征区域竖直方向上的高度为H2,将钢渣层的厚度记为H,则钢渣层的厚度可由下式进行表述:
H=H1-H2
(3)
选取语义边缘图中边缘在图像坐标系下的最低点记为p1,以固定水平步长向左右分别选取边缘采样点。采样完成后组成采样点集合:P={p1,p2,…,pn}。采样点集合水平等距地分布在语义区的下边缘,当该集合点统一垂直向上平移,则其坐标会进入目标语义内部。若继续上平移,则会在某一像素距离上与目标域的上边缘接近。实际图像的上下边缘形状不完全一致,故下边缘的采样点平移后不会与上边缘完全重合。
统计每一个点平移后所属的区域:当移动后的采样点落在了语义区域内,则将其归为Co;相反,当其落在了语义区域外,则将其归为Cb。分别统计集合内属于Co、Cb的个数N(Co)和N(Cb),当N(Co)与N(Cb)的数量差最小时记平移距离为此时语义区内的像素高度差d。即有:
d=min{N(Co)-N(Cb)}
(4)
单次采样点平移后得到的像素高度差不具有钢渣层厚度的代表性,考虑到图2(b)中钢渣层厚度与钢液区厚度边缘的不一致性,对图6(b)和(d)的结果进行竖直方向的子块分割。计算每一个子块内语义区的像素高度,加权平均得到最终的像素高度。
表2是高曝光语义区和低曝光语义区中不同竖直子块的像素高度差。

表2 各个竖直子块像素高度差单位:像素数
在得到像素高度之后,利用相机成像的透视原理可以得出像素距离与真实距离的映射关系。最终,将上述不同子块的像素距离分别平均后使用距离映射,可以得到高曝光和低曝光语义区的真实长度,二者之差即为钢渣层的厚度。
5 结语
传统的RH精炼工艺中,对钢液表面钢渣层厚度的判定大多是人眼观察,既不准确也具有伤害性。本文使用的融合分水岭算法对浸渍管表面附着的钢渣语义区进行判别,可以有效消除传统分割算法对造成的小噪团和小连通区域的影响,使得目标语义区为封闭的轮廓,为其厚度的判别提供了良好的前提。经过实验,本文算法能够对实际现场的浸渍管外部图像进行有效分割,为钢渣层厚度的预测提供了可靠的数值数据,在一定程度上可以减少由于人工判定的局限性造成的不可靠影响,保障RH精炼安全高效地进行。
