潜艇转舵时舵叶材料及舵杆位置对流激噪声特性的影响
2022-07-05彭利坤秦珩陈佳宝屈铎
彭利坤,秦珩,陈佳宝*,屈铎
1 海军工程大学 动力工程学院,湖北 武汉 430033
2 中国人民解放军 92896 部队,辽宁 大连 116018
0 引 言
潜艇的操纵性是关系到潜艇机动性和航行安全性的重要指标,其艉操纵面(艉升降舵)基本上采用舵翼组合结构的形式。潜艇航行时,需通过不断操舵来保持或改变潜艇的航向和深度,以满足水下航行需要。为保持定深航行,必须频繁使用升降舵,而舵叶的转动,将引起舵叶周围流场发生急剧变化,产生较为突出的噪声问题。
目前,关于舵翼噪声特性方面的研究有很多。例如,穆鹏[1]采用计算流体力学(CFD)和声学有限元方法(FEM)对弹性翼型腔体模型的流噪声特性进行了仿真计算,获得了在不同流速及翼型厚度变化情况下结构模型的流噪声辐射特性。吴钦等[2]基于完全耦合算法(fully coupled algorithm),对二维NACA 0009 型水翼的流−固耦合特性进行数值模拟研究,分析了流体与结构相互作用关系。屈铎等[3]采用CFD 大涡模拟(large eddy simulation,LES)及Lighthill 声类比理论对不同舵角工况下舵翼结构的流场和声场进行数值预报,分析了舵翼结构的涡量特性和流噪声特性。徐野等[4]采用CFD 和结构FEM,结合模态叠加法和声学边界元法,计算了弹性水翼的流激噪声。然而,目前鲜有研究转舵过程中的噪声特性。
综上,本文拟采用双向流−固耦合方法,计算转舵时舵翼组合结构的流场和声场,研究不同舵叶材料、舵杆位置情况下引起的声振耦合特性规律,用以对潜艇舵结构的声学设计提供参考。
1 流−固耦合运动方程
在工程上,采用FEM 可以求解流−固耦合运动方程,使用离散方法将结构离散为有限的单元,经求解结构运动的有限元方程来分析结构的振动。
式中:N为流体形状函数;p为流体单元的声压;t为时间;下标m表示流体域内某一点。
流体介质的运动控制方程可写为
流体运动方程经离散后可得
式中:x为节点位移向量;Ms,Cs,Ks分别为结构的质量矩阵、阻尼矩阵和刚度矩阵;f0为除流体对与其接触的弹性结构的作用力矢量以外的其他激励力向量。
联立流体运动的离散控制方程(3)与结构控制方程(4),可得流−固耦合运动方程:
求解式(5),即可得到流−固耦合作用下结构表面节点处的位移和声压。
2 流−固耦合的数值模拟方法
根据流−固耦合求解的处理方法,现有的数值分析方法可分为3 大类[7]:非耦合方法、弱耦合方法和强耦合方法。非耦合方法是将流体域和固体域的控制方程分别进行求解的计算方法,即首先通过CFD 计算流体载荷,然后将载荷加载到结构上,最后采用计算结构力学(computational structural dynamics,CSD)方法得到结构变形、应力分布等。弱耦合方法是在每次迭代计算时,依次分别求解流体域的CFD 方程和固体域的CSD 方程,并通过流−固交界面进行流体域和固体域之间的数据传递与交换,反复交替迭代计算,从而进行流−固耦合求解。强耦合方法是将流体和固体及其耦合作用整合在统一的控制方程中,然后再在同一时间步下对所有变量进行计算的方法。
上述3 大类数值分析方法中,强耦合方法的计算精度最高,但计算成本极大,一般难以承受;非耦合方法计算方便,但精度较差。本文选择的弱耦合方法则可在保证计算精度的前提下不至于耗费太大的计算资源。
3 流−固耦合数值计算与结果分析
3.1 几何模型
本文主要考虑转舵过程中的瞬态效应,但整体建模计算复杂,故对模型进行了简化。如图1所示,计算域设置参照了文献[8],结构部分包括舵、舵杆和舵前稳定翼,且均设置为实体单元。
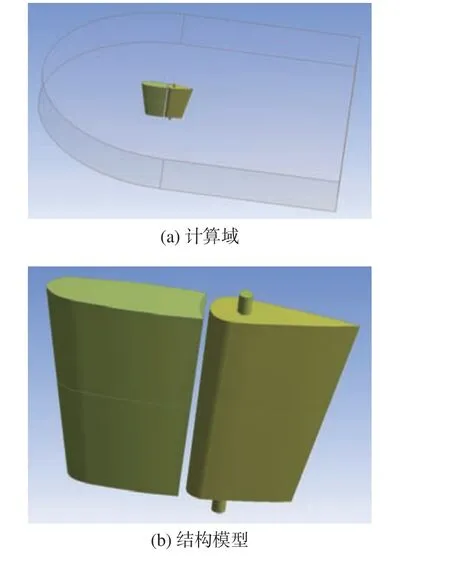
图1 舵翼组合结构模型与计算域Fig. 1 Rudder-fin combined structure model and computational domain
3.2 网格划分
考虑到四面体网格在网格变形时的适应性比较强,在划分流体域网格时采用了四面体网格,并在流−固耦合面附近对网格进行了加密。因转舵过程中流体网格会变形,网格数及变形过程中的网格质量将直接影响计算成功与否及其结果的准确性,故对流体网格进行了网格无关性验证。
针对0°舵角的稳态工况,在15 万网格数的基础上,每次增加2 万网格数对模型进行仿真。结果发现,在网格数增加到约25 万时,舵所受合力与网格数约23 万的模型相差仅0.4%,故流体域采用了约23 万的网格模型,如图2(a)所示。结构域网格采用扫掠方式进行六面体网格划分,约25 000 个节点、5 000 多个单元,如图2(b)所示。

图2 舵翼组合结构模型网格Fig. 2 Grid of rudder-fin combined structure model
3.3 边界条件设置
设置如下:进口为速度进口,参考压力为1 个大气压,出口为0 Pa 的压力出口;舵杆与舵间为“Bonded”(无相对位移)约束,舵杆带动舵,并以舵杆中线为轴转动,如图3 所示;结构与流体接触面为流−固耦合面,在对舵转动过程中的每一步进行迭代计算时,结构侧的位移通过流−固耦合面传递给流体,流体侧的压力脉动通过流−固耦合面传递给结构,直至舵完成设定的转动过程;数值计算总时长为3 s,时间步长为0.002 s(对应最大分析频率100 Hz),第1 s 内舵转速为0 (°)/s,以保证舵转动前流场计算达到较好的收敛性,后2 s以3 (°)/s 匀速转动,其转速曲线如图4 所示(图中ω 为舵的转动角度)。
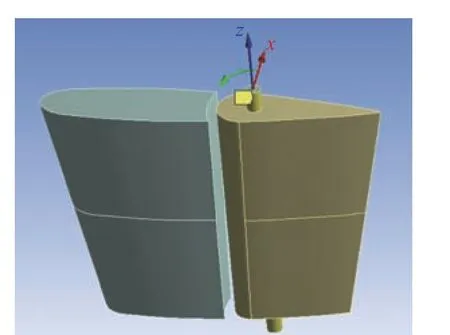
图3 模型约束设置Fig. 3 Model constraint settings
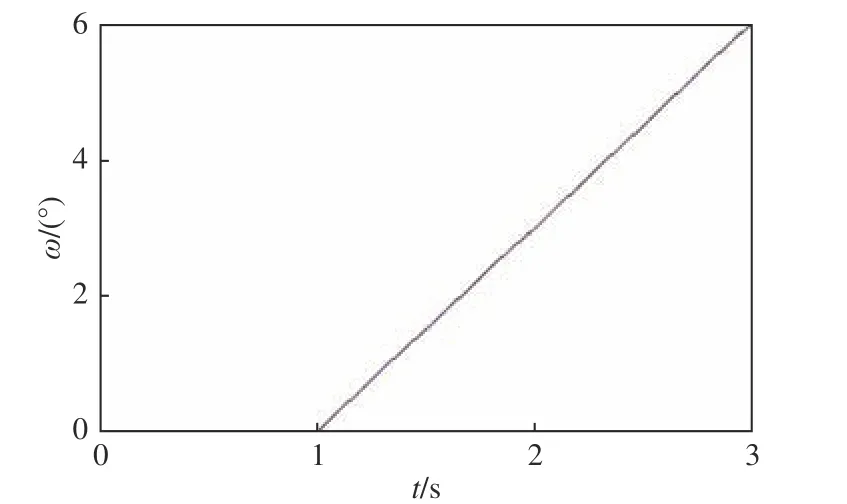
图4 舵转动速度Fig. 4 Rudder rotation speed
3.4 湍流模型选取
大涡模拟(LES)湍流模型用于计算边界层脉动压力时,要求沿壁面方向和壁面法向同时具有极其细密的网格[9]。在模拟转舵过程中,升降舵壁面周围的网格会随着舵旋转而实时发生变形,通常导致网格质量无法满足LES 湍流模型的要求。因此,LES 湍流模型不适合用于舵旋转过程的流−固耦合数值计算。而分离涡模型(detached eddy simulation,DES)是将RANS 和LES 相结合,采用RANS 求解近壁区的弱分离流动,利用LES计算大规模分离流动,从而可解决LES 求解上述问题时的不足。鉴此,本文在求解转舵过程的流场时均采用DES 湍流模型。
3.5 流体计算结果
设置进口速度为10 m/s,采用DES 湍流模型对舵翼组合结构流−固耦合进行计算,分别得到如图5 和图6 所示不同时刻下的舵翼组合结构截面的速度云图及压力云图。由图可见,在0°攻角时,因几何截面是对称结构,舵翼组合结构的速度云图和压力云图的对称性也较好,说明数值计算结果具有可靠性;在舵前稳定翼的前端,因其对水流有阻挡作用,在前端形成了近似圆形的低速区和高压区,并以稳定翼尖端向外扩散;在稳定翼与舵的间隙区域,因前后结构对水流的阻挡作用较强,水流速度很小;在组合结构尾部的尾流非常明显,且影响较远,舵尾缘处也会形成一个近似圆形的高压区;在稳定翼和舵截面的两个侧面,分别呈现出花瓣状的高速区和低压区,随着舵攻角的增大,在舵的旋向侧,高速区和低压区均在减小,而另一侧则相反。
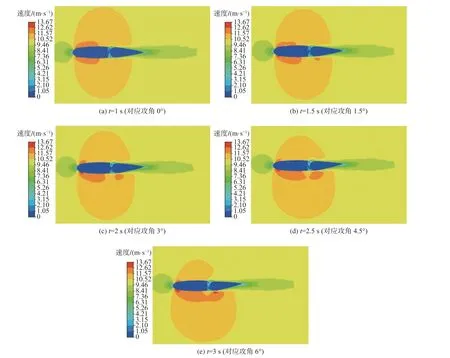
图5 不同时刻的速度云图Fig. 5 Velocity contours at different moments
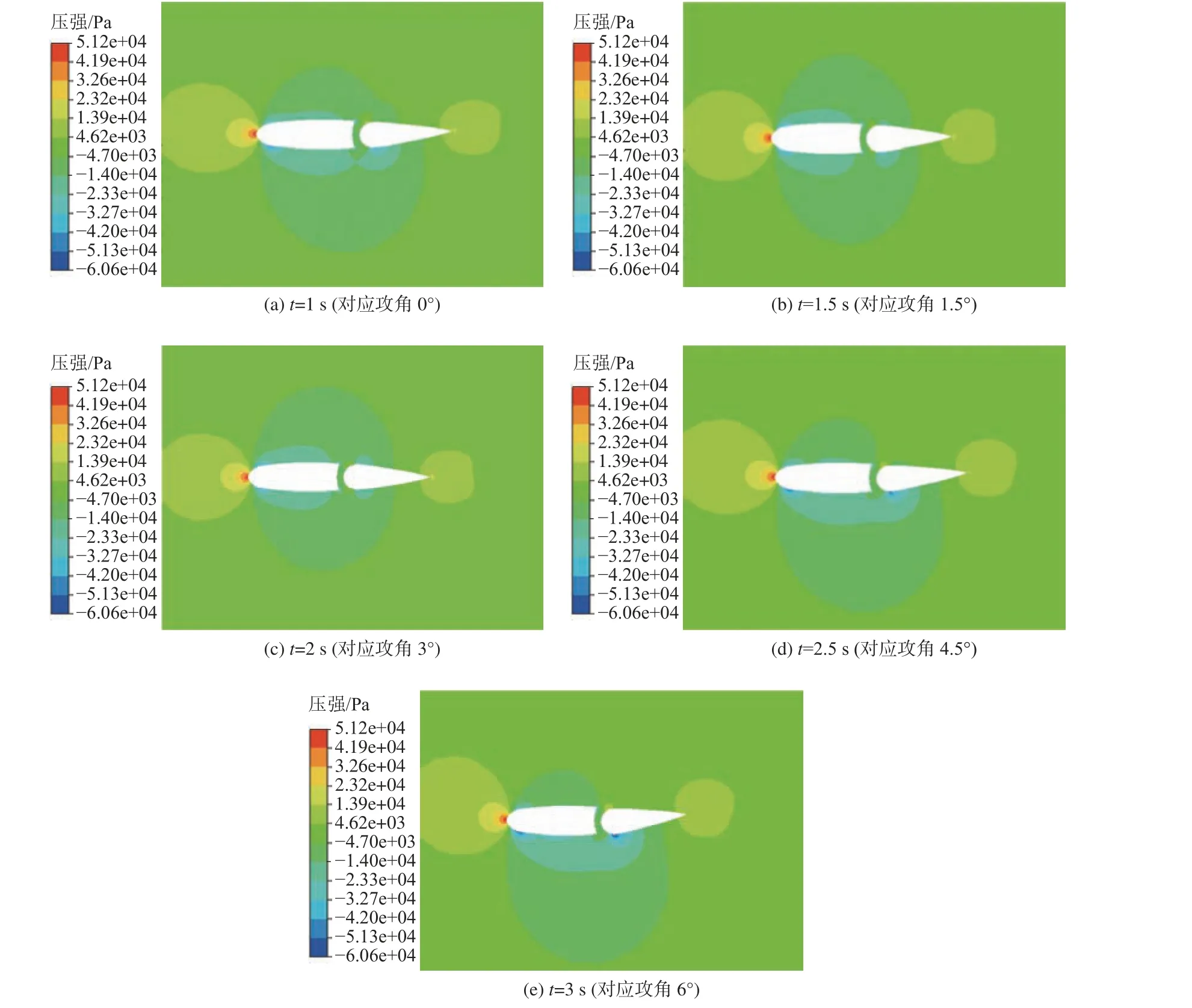
图6 不同时刻的压力云图Fig. 6 Pressure contours at different moments
图7 所示为计算得到的转舵过程中舵和稳定翼的受力(F)情况。因计算设置为1 s 时开始转舵,在1 s 之前,舵和稳定翼受到的合力趋于恒定值,表明转舵前的静态流体计算结果已收敛。在1 s 之后,二者受到的合力均匀增大,表明转舵过程中的流体计算结果较稳定。
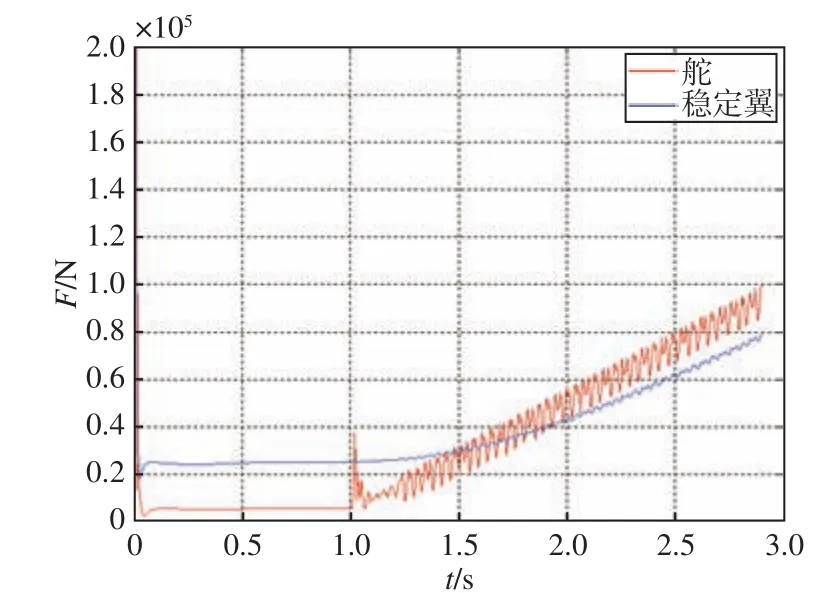
图7 转舵过程中舵和稳定翼的受力Fig. 7 Forces on rudder and stabilizing fin during rudder turning
4 声振耦合计算及结果分析
根据流−固耦合数值计算得到的流场信息,提取舵表面的受力数据,并作为激励源经傅里叶变换成频域激励,然后将数据加载在舵表面进行声场计算。因舵的整个转动过程为0°~6°,转角较小,在此仅作横向对比分析,故选取攻角为0°的舵模型作为声场计算模型。
4.1 计算模型设置及工况
FEM 计算模型为艉舵,其整个结构处于无限大、不可压缩的理想流体中,最外层网格表面设置为自动匹配层(automatically matched layer,AML)属性, 这既可以提高计算精度,也可以提高计算效率[10]。
潜艇航行过程中,舵内外充满水。考虑到舵结构和舵内、外水的耦合作用,舵外建立有水域,以对舵进行封闭包络。同样,舵内也建立有水域。采用AML 技术在舷外流体外表面设置无反射边界条件。升降舵网格模型分为舵外水、舵、舵内水3 个部分,舵外水平均厚度100 mm 左右,舵建模时采用实际厚度8 mm,按照钢材料参数设置,舵内充满水,形成舵内水域,其中舵叶网格总数约9 500 个,各部分网格模型如图8 所示。在0~100 Hz 频率范围内分别对舵翼模型施加单位扫频激励和流体激励,得到如图9 和图10所示模型的辐射声功率级Lw。由图可知,辐射声功率的趋势整体一致,流体激励不影响主要峰值频率点,但会增加一些峰值频率点。另外,因流体激励的复杂性,其波动性也比较剧烈。
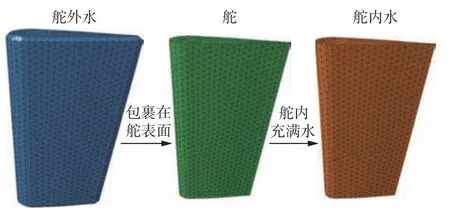
图8 艉升降舵网格模型Fig. 8 Grid model of stern rudder
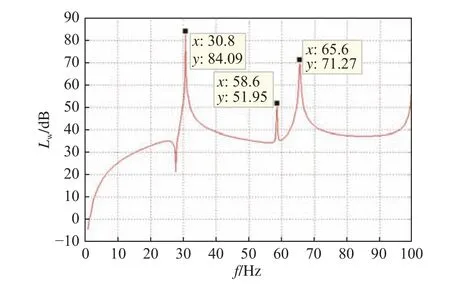
图9 单位扫频激励下的辐射声功率级Fig. 9 Radiated sound power level under unit sweep excitation

图10 流体激励下的辐射声功率级Fig. 10 Radiated sound power level under fluid excitation
在4.2 节和4.3 节中,将流−固耦合数值求解的流体脉动压力经傅里叶变换后得到的频域压力作为激励源[11],并施加到舵表面进行声振耦合研究。限于计算机资源,本文对于流场部分的计算其时间步设置为0.002 s,故仅对0~100 Hz 低频范围进行计算分析。
4.2 舵叶材料对舵声振特性的影响
为研究舵叶的材料对舵翼组合结构声振特性的影响,分别选取了铝合金、钛合金和结构钢3 种材料的舵进行流−固耦合数值计算,求解流体激励响应,结果分别如图11 和图12 所示。
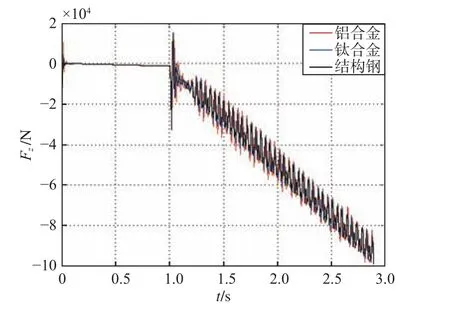
图11 不同材料舵产生的流体激励Fig. 11 Fluid excitation generated by rudders of different materials
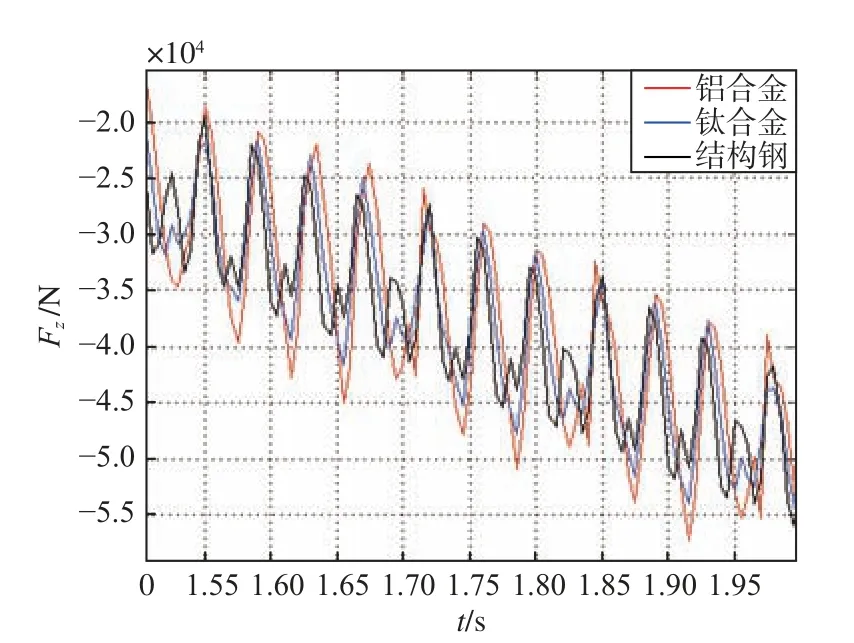
图12 图11 流体激励的局部放大图Fig. 12 Partial enlarged view of fluid excitation in Fig. 11
由图11 可见,在流−固耦合作用下3 种材料的舵翼组合结构引起的流体脉动压力(Fz)变化差别很小。由图12 所示流体激励的局部放大图可见,结构钢材料的舵翼组合结构流体脉动压力最小,而铝合金的结构引起的脉动压力最大。
在声振耦合模型中,分别设置舵材料属性为铝合金、钛合金和结构钢,并将流体激励施加到模型上进行声振耦合计算,得到如图13 所示不同材料的舵结构产生的辐射声功率级,表1 给出的是对应的峰值数据。
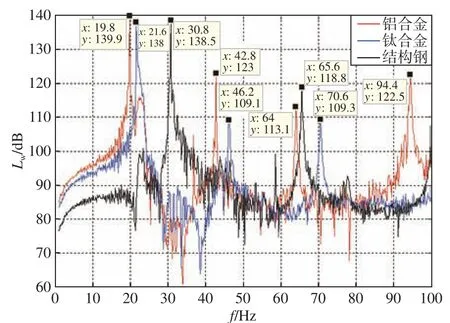
图13 不同材料舵的辐射声功率级Fig. 13 Radiated sound power level of rudder of different materials
由图13 和表1 可见:在0~20 Hz 频率范围内,铝合金舵的辐射声功率最大,结构钢舵的辐射声功率级最小;在40~100 Hz 频率范围内,除因各峰值点引起的峰值频率附近存在差异外,其他频率部分的辐射声功率级基本在同一水平波动;在0~100 Hz 频率范围内,铝合金舵的一阶峰值点最先出现,结构钢舵的一阶峰值点最后出现;铝合金舵出现了第4 个明显峰值点,而结构钢舵和钛合金舵均只有3 个明显的峰值点,这是因为铝合金的部分模态频率较低。

表1 不同材料舵的峰值数据Table 1 Peak data of rudder of different materials
4.3 舵杆位置对舵声振特性的影响
在声振耦合计算时,将舵杆位置作为固定约束条件。为研究舵杆位置对舵声振特性的影响,选用结构钢作为舵叶材料。如图14 所示,在实际模型位置的基础上,分别将舵杆前移150 mm 以及后移150 mm,计算得到如图15 所示的不同舵杆位置时的辐射声功率级。由图15 可见,随着舵杆位置的后移,一阶频率在向后推移,且峰值频率逐渐增大,而二阶频率随着舵杆位置的后移而提前出现。在0~28 Hz 频率范围内,随着舵杆位置的后移,辐射声功率级减小;在40~100 Hz 频率范围内,除了各峰值点引起的峰值频率附近存在差异外,其他频率部分的辐射声功率级基本在同一水平波动;舵杆位置的前移会使所研究频率范围内的噪声降低,这是因为旋转中心的后移导致舵叶附近的流场更复杂,影响了舵翼结构的声振特性。
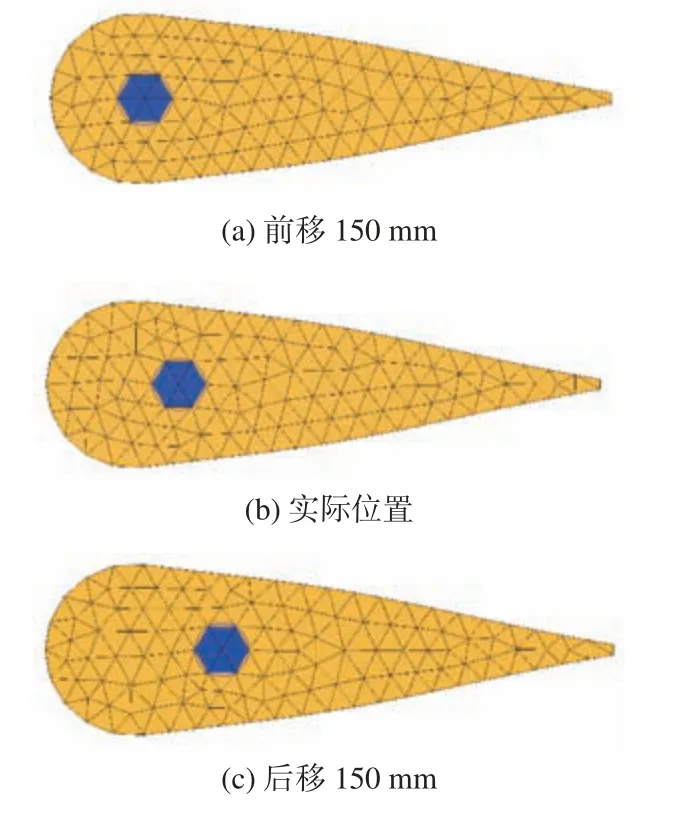
图14 舵杆位置Fig. 14 Rudder stock position

图15 不同舵杆位置时的辐射声功率级Fig. 15 Radiated sound power level at different rudder stock positions
5 结 论
本文以潜艇的艉升降舵结构为研究对象,介绍了流−固耦合理论及其数值模拟的实现。首先,采用CFD/CSD 双向流−固耦合方法数值模拟了艉升降舵舵翼组合结构模型的转舵过程,求解得到了转舵过程中舵表面的流体脉动压力。然后,将流体脉动压力作为激励加载到舵上,采用AML及声振耦合技术研究了舵叶材料、舵杆位置对舵的声振耦合特性的影响,并得出如下结论:
1) 在铝合金、钛合金和结构钢材料中,结构钢舵引起的脉动压力波动最小,其一阶峰值点最后出现,表明结构钢舵的声振特性最好。
2) 随着舵杆位置的后移,一阶峰值频率和幅值均增大,而二阶频率随着舵杆位置的后移而减小;且舵杆前移会使0~100 Hz 频率范围内的总声压级降低,表明在一定频率范围内舵杆位置前移可改善舵翼结构的声振特性。