浅谈巡检机器人在环境治理领域的探索应用
2022-07-04张昊晨
薛 蔚 张昊晨
上海建工集团工程研究总院 上海 201114
1 项目概况
本项目为某环境治理公司土壤修复工厂,位于上海市宝山区,项目地块原为某公司皮革生产车间,占地面积约70 000 m2。
地块东部区域已于2017年底改建用于重金属和有机污染土壤的异位修复,目前留有1个密闭修复大棚、1个土壤异位淋洗区域、露天土壤堆场以及1个临时办公楼;地块西部车间区域也在2019年完成撤场搬迁,目前留有4个占地面积分别为8 000、11 000、3 600、600 m2的工厂车间。
2 修复技术介绍
本着经济高效,充分利用现有资源,避免大规模建设,着重于修复装备的能力建设,突出经济性、可靠性、安全性和长久性的规划和设计原则,修复工厂项目将充分利用地块现状保留的设备设施,通过重新规划与设计,形成涵盖土壤淋洗、化学氧化、热脱附、生物处理、气相抽提等多种修复工艺,能够规模处理各类重金属污染、有机污染,以及重金属与有机复合污染土壤的区域大型综合性修复工厂。
根据初步设计方案,修复工厂主要包括土壤修复工艺功能区块,同时配套有中央控制室、废水处理站、综合实验室、土壤暂存堆场等公用设施。修复工厂将设置东、西2个大门,污染土壤通过土方车运输至修复工厂相应的污染土壤暂存区域或直接进入相应的修复工艺功能区块。
挥发性有机污染土壤优先在⑨号车间内南部区域暂存,其他污染土壤的暂存区域包括⑨号车间东侧和④号堆场南侧土壤堆场。
中低浓度有机污染土壤主要通过分别位于⑦号车间和①号大棚内部的2个异位加药搅拌工艺区块进行修复。作为当前土壤修复行业中最为成熟,也是应用最为广泛的处理工艺,异位加药搅拌将是修复工厂所有修复工艺中的绝对主力,预计最大年处理量将达35万 m3。
高浓度有机污染土壤主要通过2个回转窑异位热脱附工艺区块进行修复处理,⑦号车间内部中东侧和①号大棚内部东侧为其预处理区域,⑦号车间和①号大棚室外东南侧紧邻区域为设备区域与出土区域。回转窑热脱附作为高浓度有机污染土壤修复的终极武器,在修复工厂建成后的最大年处理量将达6万 m3。
3 修复工厂环境特点及研究思路
环境治理行业一直以高毒性、高不确定性等危险作业环境为显著特点。目前,该土壤修复工厂即将开工,作为异位处理基地,会同时进行多项目处理,须考虑在此过程中解放劳动力,使更多的人在从事专业技术劳动的同时提高工作效率以及质量。为此,打算在修复工厂中引入机器人,作为工厂大脑的存在,能统筹安排污染土壤处理过程,解放劳动力,进一步践行“无纸化、无人化”的工厂理念。
目前,智能感知认知、多模态人机交互、云计算等智能化技术的不断成熟,为智能机器人的演进提供了坚实的发展基础。本次研究及尝试是数字化时代在土壤修复领域的再次突破。若能在企业内成功普及,不仅将对整个修复工程行业起到示范性的带头作用,更是土壤修复项目施工管理领域的标杆。
在现场日常巡检工作中,执行单位主要是通过人工方式对设备和环境进行大致的评估判断,巡检人员会近距离接触有毒有害土壤及水体,这样的方法普遍存在工作条件差、劳动强度大、工作效率低、检测质量低、手段单一等弊端。
为了保障人员安全、降低损失风险、提高企业的生产作业效率,考虑使用巡检机器人的方式。该机器人初步开发研究思路为:
1)机器人是一门多学科交叉的技术,涉及到机械设计、计算机、传感器、自动控制、人机交互、仿生学等多个学科。通过解决机器人技术中的感知、定位和控制这3个重要问题,基于本土壤修复工厂的工作特点,研究开发一款相当于工厂大脑的机器人。这个机器人具备采样、分析、报警、远程监控等多种功能。
2)具备AI识别功能,实时掌握工厂内人员信息,动态识别厂内人员违规(如未穿戴防护装备等),对人员安全规范问题起到保障作用。
3)具备环境监测功能,实时监测工厂内污染物含量,建立污染物三维云图。当污染物含量过高时,通过声光电发出警报,并推送至智慧管控平台。
3.1 机器人必须具备的3个重要系统
3.1.1 巡检机器人系统
轨道巡检机器人采用轨道倒挂式伺服行走方式,并搭载有音视频采集设备、红外热成像设备、气体检测传感器等,实现了实时图像监视、红外热成像测温、气体浓度监测、现场告警提示等功能。
3.1.2 无线通信系统
针对生产现场巡检路径长、防爆要求高的实际情况,采用无线通信系统实现巡检机器人系统与远程监控系统的组网功能。目前无线组网传输技术成熟度较高,能够实现音视频信息、采集数据、控制指令的高速传递。
3.1.3 远程监控系统
基于无线通信方案,远程监控系统的布设具有较高自由度。远程监控系统包含基础硬件平台和定制化开发的功能软件,其中软件部分需要在与用户深度沟通需求的基础上进行定制化开发。
基于以上3个重要系统,并通过在巡检机器人上搭载运动摄像头、便携式PID等环境监测设备,可实现与现有智慧管控平台数据对接,回传秒级各类数据进行分析,供业主方进行数据分析、对外展示等功能。
3.2 具体解决方案
基于现场对机器人的初步设想,并通过数次技术协调后,最终使用了TIRS-02通用型巡检机器人解决方案。该款机器人由东庭自动技术自主设计研发,并拥有多项专利保护,是东庭新一代小型智能巡检产品。秉持“小型化、工具化”的设计理念,在保持同类巡检机器人功能的基础上,体积更迷你、检测更精准、实施更便捷、操作更简单,可广泛应用于室内外的智能化巡检任务(图1)。

图1 TIRS-02通用型巡检机器人
3.3 功能实现
3.3.1 自动定时巡检
在厂房顶部铺设环厂轨道,预先规划好巡检路线,基于TIRS-02本身搭载的高清防抖抓拍摄像头,每天于8:00、12:00、16:00、20:00以及24:00进行常规巡检,巡检过程中抓拍关键节点(如高级氧化设备、热脱附设备、淋洗设施等)的施工状态,中央控制室的值班人员可全程观察巡检路径上存在的安全隐患,并可将抓拍图片回传至智慧管控平台留存(图2)。
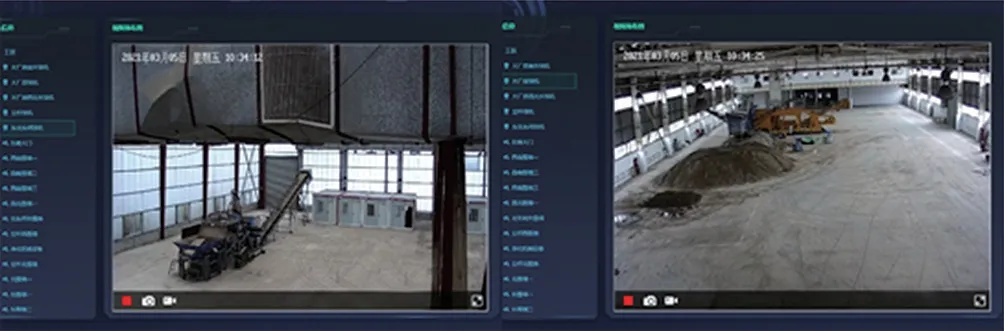
图2 巡检抓拍照片(①号大棚)
3.3.2 AI模块识别危险源及违规行为预警
在TIRS-02的硬件基础上,我们自主二次开发并给机器人加载了华为的AI模块,以识别工厂内部施工人员可能存在的违规和不合理情形(如未佩戴防护、未穿反光背心、人员危险姿态、人员入侵等);若巡检设备在巡检时发现此类情况,其将暂停巡检线路,停在原处抓拍并回传至智慧管控平台,同时通过自身的扩音系统告知对象违规情况,巡检机器人重复提醒数次后,继续进行原巡检线路的工作;在这个过程中,中央控制室的工作人员可对突发情况及时处置,做到第一时间发现、第一时间处理、第一时间解决,做到可防可控。
3.3.3 PID模块便携采集实时数据
传统的环境修复施工现场的温湿度、VOCs等数据采集都是以人工携带手持式PID设备进入各类复杂环境进行数据采集,而环境治理领域的特殊性往往会导致现场有毒有害气体严重超标,巡检人员即使穿戴了相应的防护设施,也会给身体健康甚至生命安全带来极大的安全隐患。
在有了巡检机器人之后,我们可以将原手持式PID设备通过模块搭载的方式整合到设备中去,以实现更安全的VOCs数据采集,并且可结合每日的常规巡检进行同步污染气体数据采集,推送至智慧管控平台后端,最终可生成监测数据汇总曲线(图3)。
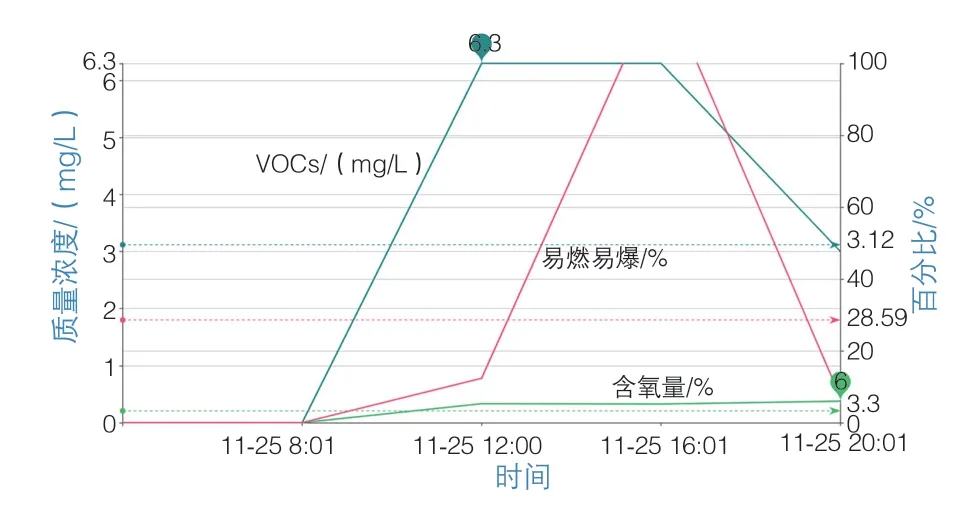
图3 监测数据汇总曲线
3.3.4 对户外巡检的进一步设想
以上初步方案是在本修复工厂内用轨道式巡检机器人实现3点主要功能(自动巡检+AI识别+PID数据回传)。而在未来的土壤修复领域,尤其对室外开阔区域的巡检需求依然是个严峻的问题。对于很多技术人员不方便到达的地点,如复杂山地、深基坑(受污染)等需要其他手段进行日常巡检,如使用无人机、无人履带车搭载各类数据采集模块(摄像头、360°云台、GPS定位、多点红外测温、PID模块、AI模块等)进行大范围的室外日常巡检,在合理区域设置换电装置进一步增加无人机或无人车的巡检续航距离,甚至能够进一步做到快速土壤采样、快速分析生成报表等,同时结合BIM+GIS进行大数据采集,可根据不同项目的不同需求进行深度二次研发,进行专属化定制以适应项目实际需要。
4 结语
目前来看,在国内建筑施工领域,无人化巡检依然是一片蓝海,而土壤、地下水修复板块由于其行业的特殊性,对现场安全的要求更高。相较于传统的人工巡检,无人化巡检对人员现场依赖性较低,专业技术人员在中央控制室即可完成数据采集、巡检干预、危险预警、数据分析等常规工作,对提高现场人员的巡检效率、保证现场人员安全均起到了至关重要的作用。
结合“十四五”规划和2035的远景目标,建筑业这一传统行业在信息化、无人化的探索中还有很长的路要走。相信随着技术的更新迭代以及在越来越多现场的应用,无人化巡检必将在建筑业乃至环境治理领域生根发芽,遍地开花。