分布式能源站大型设备数字化吊装安全监控系统研究
2022-07-02覃文波
黎 娆 周 诚 覃文波
(1.华中科技大学 土木与水利工程学院,武汉 430074; 2.武汉数字建造产业技术研究院有限公司,武汉 430074)
引言
随着中国经济高速健康地发展,石油化工、电力建设和地铁工程的规模逐渐扩大,其单机设备也越来越大型化、精密化[1]; 同时,工厂化预制的逐渐推行,也出现了体积更大,重量更重的大型模块[2]。大型、重型起重吊装设备对起重吊装工艺要求越来越高,需要确保设备的准确吊装与防碰撞,难度远远超过以往的吊装作业。传统的吊装方式往往需要多个指挥员协同完成吊装作业,现场环境的嘈杂、多人联合作业都会使沟通受到影响,同时依靠指挥人员自身的经验和判断无法保证作业的精度和一致性,这将对作业人员产生巨大的负面影响,危及作业的安全。因此,提高大型结构物吊装过程中吊装的精确性、安全性与吊装行为的可预测性具有重大意义。
目前,吊装安全监控领域的研究往往对起重机械的姿态进行实时的监测,通过姿态变化分析可能出现的安全问题。对于载体姿态可以采用如地磁、光电码盘等方式进行测量[3],但无法获得载体的三维姿态; 基于GPS的姿态测量系统具有高精度、高灵敏度、体积小等特点[4-5],安装于起重机的吊臂上,实时提供精确的三维模型,但是井下的卫星信号不稳定,使得其姿态测量偏差较大; 惯性测量系统利用角速度的陀螺仪和载体的加速度来获得实时的三维姿态[6],但其系统误差随时间而积累[1]。
为了克服上述现有技术中的不足,构建一种基于物联网的分布式能源站大型设备吊装安全监控系统。
物联网是通过各种信息传感设备,如传感器、射频识别(RFID)技术、全球定位系统(GPS)、红外线感应器、激光扫描器等,实时采集监控、连接、互动的物体或过程的各种需要的信息,与互联网结合的一个巨大网络,包括RFID、传感网、端到端(M2M)、信息化和工业化两化融合的四大关键领域和感知层、网络层和应用层三层技术架构。其目的是实现物与物、物与人,所有的物品与网络的连接,以方便识别、管理和控制[7-9]。基于此技术,该吊装安全监控系统可以实现吊装现场监控全局域的可视化,实现吊装防碰撞与安全管控的自动化、信息化[10],为一线指挥人员提供准确、直观的预报警信息,从而向吊装操作给出统一、标准化的吊装指令,协助其顺利、安全完成吊装作业,为大型吊装作业提供了安全、实时、有效的技术保障。
1 工程背景
1.1 工程概况
某国际博览中心分布式能源站项目是天然气冷热电三联供项目。该项目总投资为2.1亿元,建设规模为21.5MW,共分两期建设完成。项目位于某国际博览中心洲际酒店停车场地下负一层,总占地面积约6 800m2。项目建成后,可有效满足该国际博览中心二期洲际酒店(含酒店式办公)、假日酒店、海洋乐园所需的供电、采暖、制冷及生活热水负荷室内海洋热源需求。
此次吊装物体为某国际博览中心分布式能源站的发电机组,其中发电机A的规格尺寸为9900x2400x2900(mm),重32.9t,发电机B的规格尺寸为4700x2100x2300(mm),重21.3t。吊装通过四个20T倒链提起,同时加装两台10T倒链备用,吊装井深10m,尺寸为1200x800(mm),其中可移动平台为的尺寸为1100x300(mm),具体吊装尺寸如图1所示。
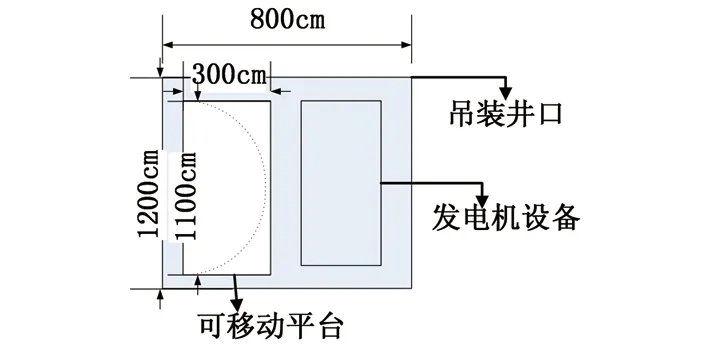
图1 发电机吊装尺寸图
1.2 吊装步骤
某国际博览中心分布式能源站的发电机组吊装包括卸车、平移、起吊、结构平台移开、设备下放、驳运等步骤,具体步骤如下:
(1)设备卸车后,将发电机六组转向搬运坦克车平移到吊装孔前,用液压顶起升设备到合理的高度,在铁板上面放置型钢,让搬运坦克在型钢上面形成钢轨运行模式;
(2)对吊装梁和葫芦进行试吊,检验设备性能; 设备放置至可移动平台时,通过四个20t倒链提起,同时加装两台10t倒链备用,防止葫芦在起升或下放的时候出现机械故障,提升高度为300mm,四个倒链挂于天井的吊梁上,并且需要同步上升,不可发生倾斜,防止受力不均;确定设备吊起安全后,下方结构平台可以移开;
(3)设备通过倒链缓慢入至地下室楼面,下放前需给地面铺设钢板给予保护,提前放置4个地坦克准备下一步搬运,下放到最后,留一定的高度,确认设备落位的地点来调节设备搬运的方向。
2 吊装安全风险分析
通过上述吊装步骤,可以分析出设备在吊装过程中所存在的安全隐患。
(1)吊装盲区
根据吊装的实际情况,其盲区主要是由于下吊过程中,当设备下吊至井下时,吊装操作人员无法看清吊装井下的状况,设备与吊装井的距离以及设备的姿态都无法掌握,影响其吊装动作。
(2)吊装设备姿态
在某分布式能源站大型设备吊装案例中,由于发电机设备尺寸较大,而井口尺寸有限,发电机在设备的下吊过程中容易与吊装井壁发生碰撞; 同时,由于吊装采用四个倒链下吊,需要保证设备在下方过程中同步下放,防止受力不均。
(3)吊装索具
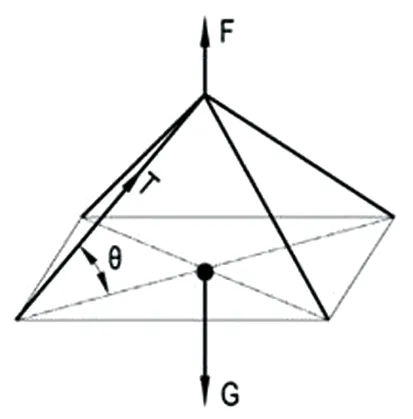
图2 吊装受力示意图
由于发电机设备重达32.9t,其所有重量由四条钢丝绳承担,如图2所示,且吊装过程如果发生倾斜,容易导致四条钢丝绳受力不均,致使发生钢丝绳断裂。
(4)风速
发电机设备在下吊过程中,容易受到风力的影响,发生晃动,特别是风力较大时,设备的安全性受到严重的威胁,且遇有六级大风以上的恶劣天气查,应停止施工。
3 分布式能源站大型设备数字化吊装安全监控系统设计
3.1 系统总体方案设计
基于上述安全风险分析和物联网相关理论及其技术,构建了分布式能源站大型设备数字化吊装安全监控系统。该系统操作简便,通过感知层的设备单元实现过程定位,并经传输、分析、控制实现现场位置的跟踪与吊装安全预报警管理,系统框架如图3所示。
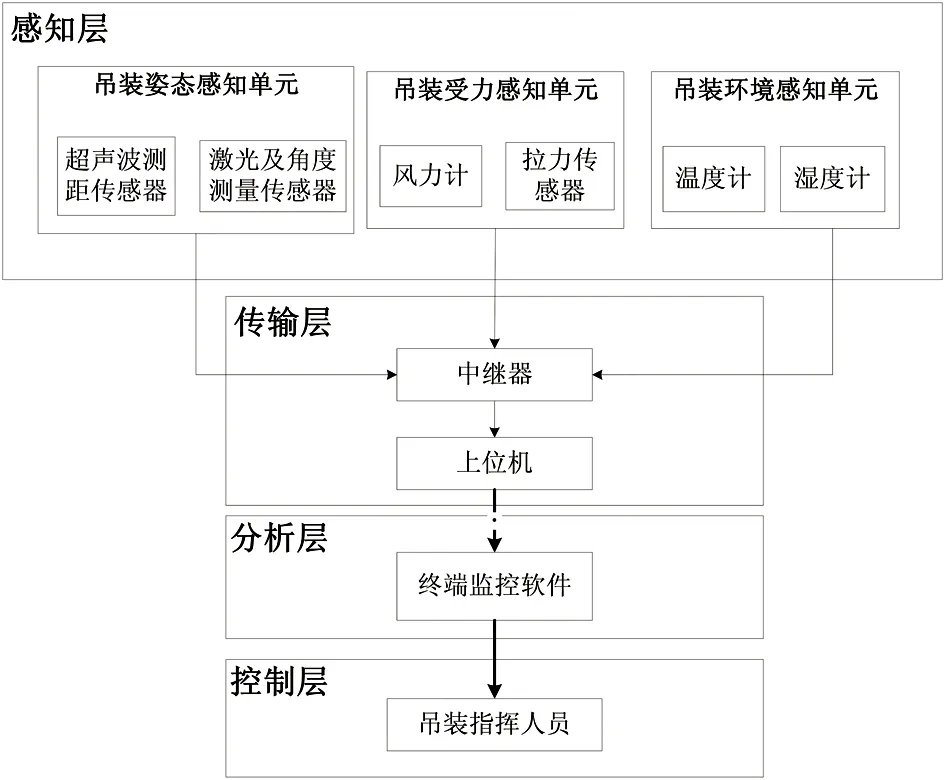
图3 系统网络框架图
3.2 监控系统网络拓扑设计
在吊装现场系统的布设中,分析层是整个系统核心,负责现场吊装数据信息的存储运算、预报警发布及应急制动,因此可以实现帮助吊装指挥人员实时管控现场吊装安全形势。传输层实现感知层与分析层的数据信息的传递。
该系统的感知层由吊装姿态感知单元、吊装受力感知单元、吊装环境感知单元组成,其中吊装姿态感知单元由超声波测距传感器、激光测距传感器及角度测量传感器组成,吊装环境感知单元由拉力传感器、风速计组成,吊装环境感知单元由温度计、湿度计组成。吊装过程中,超声波测距单元将测量发电机与井壁及可移动平台的距离信息,激光测距单元是用来反馈发电机与井底距离信息,角度测量单元则可以实时记录发电机的倾角信息,拉力传感器将监测吊装锁具的实时应力,风速计用于测量吊装过程中的实时风速,温度湿度计用于测量吊装现场环境的温度及湿度; 系统的传输层由中继及上位机组成,用以保证监测数据的实时传输,并汇聚至分析层,分析层为终端监控软件,用于实时显示上述测量数据,防止发电机与井壁和井底发生碰撞,并对危险场景进行报警,可以起到提醒指挥人员的作用,从而及时向起重机驾驶员发布调整指令,纠正危险姿态。
3.3 预报警规则设计
为了及时有效地实现监控预报警,制定了详实的预报警流程。其中,各传感器单元报警规则如表1所示:当吊装设备与井壁及周边其他设备的距离小于50mm时,发生二级报警,指挥人员对吊装人员发出调整指令;当吊装设备与井壁及周边其他设备的距离小于30mm时,发生一级报警,指挥人员对起重机驾驶员发出暂停吊装指令;当吊装设备与井底的距离小于50mm时,发生二级报警,指挥人员对吊装人员发出减速指令;当吊装设备与井底的距离小于30mm时,发生一级报警,指挥人员发出暂停吊装指令;当吊装设备角度与设定角度相差10%时,发生二级报警,看到此警报的指挥人员将对主吊驾驶员发出调整指令; 当吊装设备角度与设定角度相差20%时,发生一级报警,此时指挥人员对起重机驾驶员发出暂停吊装指令。

表1 预报警规则
3.4 设备选型及布点优化设计
硬件上,系统主要由超声波测距传感器、激光测距传感器、角度测量传感器、拉力传感器、风速计、温度计、湿度计、中继及上位机组成。为了方便临时构建分布式能源站大型设备数字化吊装安全监控系统,各传感器采取小型化设计,分别放置于拉杆箱内,如图4所示。

图4 大型设备吊装安全监控系统
根据工程需要,超声波测距传感器、激光测距传感器、角度测量器、拉力传感器均为自主开发研制。系统各层均为无线通信方式,不依赖环境网络,硬件模块的安装为无损方式,可部署在发电机的任意位置; 硬件模块测距单元与无线收发单元通信距离大于50m,实现移动中测距, 测距单元使用n-cba技术,实现无盲区通信; 同时,各传感器单元可通过系统软件远程待机或停止。各传感器的参数如表2所示。

表2 传感器具体参数
根据吊装过程的安全分析[11]可知,发电机的四周均会有潜在的碰撞安全隐患,故在发电机的前后左右四侧分别布设2个超声波测距传感器,用以测量发电机在井内与井壁及可移动吊装平台的距离; 同时,1个激光传感器和1个角度传感器布设在发电机后侧的底部,用于测量发电机到井底的距离及其角度; 另外,拉力传感器分别布设在四个倒链上,在吊装井的四边分别布设风力计及温度湿度计。终端监控平台则放置在吊装井的附近,方便通信和指挥吊装操作人员。
3.5 软件功能设计
软件方面,系统平台设计了6个功能分区,如图5所示,通过6个功能区的运用可以实现系统数据采集、定位管理、历史回放、系统管理等功能,实时掌握吊装过程中设备实时吊装姿态; 主界面左上角为系统参数区,其中采样频率可以根据吊装实际情况选择不同的频率; 下面的传感器位置设置区,用以将传感器实际布置位置对应的显示在系统上; 随后是系统命令区,包括系统的激活、启动及关机命令,有效地控制各传感单元; 监控回放区可以通过加载数据文件,实现吊装过程的回放; 电池电压区可以实时显示工作状态下各单元的电池使用情况,方便传感器的更换; 面积最大的则是监控实施显示区域,吊装过程中,各传感单元的实时数据则会显示在该区域。
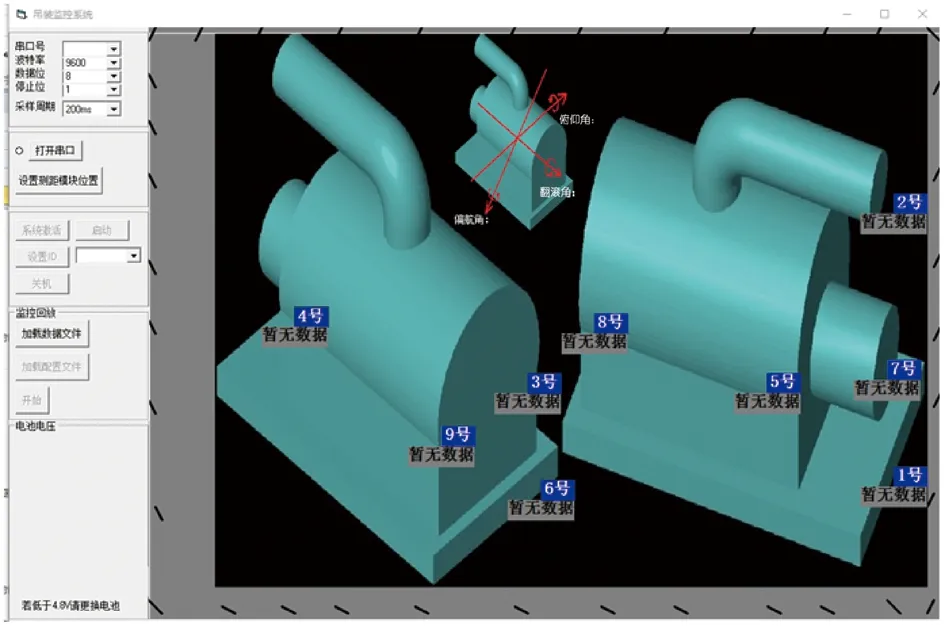
图5 系统界面图
4 分布式能源站大型设备数字化吊装安全监控系统实施
4.1 现场安装调试
发电机卸车后,将各传感器按照布设方案分别布设在相应位置上,如图6所示。同时,拉力传感器分别布设在四个倒链上,在吊装井的四边分别布设风力计及温度湿度计,中继器布设在在吊装井井口,上位机位于终端软件附近。

图6 系统现场安装
传感器安装完成后,打开各传感器单元、中继器、上位机,打开起重终端软件,实现设备联调、通讯畅通,解决联调中的软硬件问题。不能正常工作的传感器需要及时更换,并根据系统应用中显示的传感器实时电压,及时更换传感器电池; 另外,针对系统应用中发现的问题,及时调整设备的工作状态,优化定位算法,完善系统拓扑结构等,通过上述措施确保系统的正常运行,从而对现场吊装进行实时监控。
4.2 数据采集及分析
登录系统后,对系统进行调试,然后进行吊装数据采集,具体操作步骤如下:
(1)选定串口号,并根据实际情况选定采样周期;
(2)根据监控方案设置传感器模块位置;
(3)打开串口,激活系统,并启动,开始吊装监控。
(4)检查电池电压,若小于4.5V,则更换电池;
(5)启动系统,开始吊装监控。
本系统于2016年5月2日正式在某国博分布式能源站进行使用。提取系统1号激光(发电机底部)及角度传感器及3(发电机前侧)、5(发电机左侧)、7(发电机后侧)、9号(发电机前侧)超声波传感器在13:25:00-13:25:20吊装过程中的实时数据,各传感单元的变化趋势如图7~8所示。

图7 发电机吊装实时距离数据
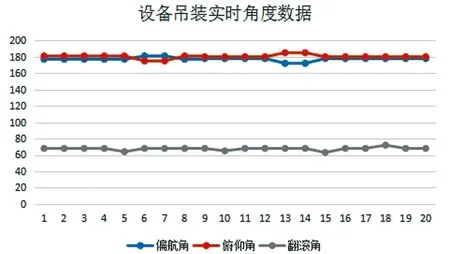
图8 发电机吊装实时角度数据
由图7可知,在吊装过程中发电机的吊装的四周距离一直处于安全状态,均未有小于50cm需要警报的情况出现,但可以看到位于左侧的5号传感显示发电机的左侧与井壁的距离为在220cm左右,是发电机四边在这段时间内距离井壁最近的一边,需要引起一定的注意,以免发生碰撞。由图8所知,吊装过程中发电机的三个角度不断发生变化,说明发电机这段时间内存在扰动,处于不断晃动的状态,因此需要在吊装过程中不断调整四个倒链,以至发电机平稳地下吊。在以后的数据采集和分析中,还可以结合倒链的拉力传感器数据来分析各角度的变化与不同方位拉力变化的关系,从而通过检测出晃动状态就能达到精准调整吊装倒链。
5 结论
分布式能源站大型设备吊装的主要安全风险来源于在设备体积重量过大,吊装井口尺寸较小的情况下,设备在下吊过程中容易发生碰撞以及钢丝绳断裂的安全隐患,因此笔者提出了基于物联网理论,利用超声波测距传感器、激光与角度传感器、拉力传感器、风速计以及温度湿度计进行分布式能源站大型设备吊装行为的安全管控,构建了基于物联网的分布式能源站大型设备吊装安全监控系统并应用于实际工程中,得到以下主要结论:
(1)通过分析分布式能源站发电机吊装的步骤及风险,采用超声波及激光方式对调转过程中的安全距离及角度进行跟踪,对防碰撞预报警,对吊装索具的拉力以及实时的风速进行监控,并将这些信息集成到物联网中,从而构建了基于物联网的分布式能源站大型设备吊装安全监控系统;
(2)应用结果表明,该系统能够及时地反映吊装过程中设备的实时吊装姿态,使吊装过程可视化及数字化;
(3)限于该系统是第一次应用于工程项目,现场传感器的布设无法有效地监控到全部的安全隐患,对于传感器化布设方法的优化,是下一步研究的重点。
