基于车辆动力学响应特征的越野地面分类方法*
2022-07-02李雅欣武维祥孙博华韩嘉懿
赵 健,李雅欣,佟 静,朱 冰,武维祥,孙博华,韩嘉懿
(1.吉林大学,汽车仿真与控制国家重点实验室,长春 130022;2.上海捷能汽车技术有限公司,上海 201804)
前言
越野地面类型复杂、特征多变,是越野汽车动力学控制乃至智能驾驶研究必须面临的挑战。其中,地面类别可以直观反映越野地面的基本特征,因此,越野地面类别识别技术的研究始终受到关注。
对地面类别的识别方法可分为基于环境传感器方法和基于车辆动力学响应的方法。其中,基于环境传感器的方法主要是利用相机、激光雷达和声学传感器等环境传感器,对车辆行驶前方或下方的地面进行探测,根据地表颜色、纹理或几何外观判断地面类别。这种方法可以在车轮驶过地面之前就获取到地面信息,但其需要额外的传感器且未能直接反映车辆和地面之间的相互作用。基于车辆动力学响应的方法,则是通过汽车驶过越野路面时的状态与动力学响应信息来判断地面分类,这种方法基于车载电控系统提供的信号即可实现,且由于车辆状态本身就是车和地面之间的交互结果,这类方法能够直接体现车辆和地面之间的相互作用。因此,基于车辆动力学响应的地面分类方法始终有着不可替代的研究价值。
具体实现上,基于车辆动力学响应的地面分类方法又可以分为基于规则的方法和基于机器学习算法两种。基于规则的方法根据车辆状态推算出用于推理的车辆状态量,接着进行机理分析和分类逻辑制定,进而区分地面类别。Padarthy 等根据车辆在湿滑程度不同的地面上的纵向滑移率、纵向加速度和环境温度设计模糊逻辑分类器,实现了湿滑地面的识别。Khaleghian 等在车辆上配置智能轮胎系统、底盘和车辆加速度计及编码器,利用加速度信号、车辆轮速和滑移率设计模糊逻辑,实现了对沥青、混凝土、土壤和草地等地面类别分类。武维祥计算车辆的滚动阻力和轮速波动信号,通过二者设计模糊逻辑分类器,使用随机森林实现了软硬路面的识别。Gorges 等提取地面垂向功率谱数据,根据待识别地面的轮廓功率谱和标准不平路的轮廓功率谱进行比对,实现了地面不平度等级的识别。此类方法实现简单,对计算能力要求低,但要制定能够全面覆盖不同路面和行驶工况的辨识规则比较困难,且算法参数标定要求高。
近年来随着机器学习算法的快速发展,涌现出了大量基于机器学习算法的地面分类方法的研究。王岩等利用智能轮胎上的纵侧向加速度信息提取统计量,使用支持向量机实现高、中、低附着地面的分类。单添垚利用轮速信号、悬架行程、车辆加速度等信号的统计量,使用神经网络实现典型不平路的分类。Masino等利用自然驾驶数据和惯导信号用支持向量机实现了坏路面的分类,并对影响分类准确率的信号及其统计量进行分析。李力从路面本身的机理分析路面识别的敏感量,最终在仿真和实车实验中面向不同工况建立了隐马尔可夫模型以识别路面类别。Yang 等在车辆上安装轮胎六分力传感器,将轮胎力数据用支持向量机实现了不同越野软路面的识别。梁冠群等使用长短期记忆网络,利用车辆轮心加速度的时序信号而非手动提取的统计量,实现了路面不平度等级的识别。
基于机器学习的路面识别方法可以利用机器学习模型本身的数据拟合能力,简化辨识逻辑的提取过程,但如何选择合适的车-路作用特性来有针对性地设计分类器是其难点之一。除直接使用测得的车辆动力学状态作为特征外,还有一些研究根据分类任务设计更有针对性的车路特征计算方法,得到较为简便的机器学习分类算法结构以实现路面分类。Li 等以车辆加速度与速度的比值作为分类指标,建立了神经网络模型对路面不平度进行识别。Ward、Wang和Qin等的研究中,采集了车辆非簧载质量部分的垂向加速度和车辆速度,利用1/4车辆模型对地面轮廓进行估计,对地面轮廓提取时域、频域和时频域特征,利用支持向量机、随机森林和深度神经网络等方法实现了不同材质或不同不平度的路面的识别。
本文中将开展基于车辆动力学响应的典型越野地面分类研究,设计分类算法特征量并搭建机器学习分类器,实现沙地、土路、水泥路和雪地的分类识别。结合由车辆动力学响应中挖掘的地面不平整度特征和地面力学特征作为分类特征,基于LSTM 模型实现高准确率的越野地面识别算法;为了进一步处理真实越野条件下由于环境的随机性带来的车辆识别结果跳变问题,引入隐马尔可夫模型,根据数据识别正确率和算法的性能进行分类结果后处理,最终在连续的车辆动力学响应数据上实现准确且稳定的越野地面分类。
本文中设计了基于机器学习的地面分类算法,但并未采用机器学习分类器设计中通常采用的大量数据的因子分析方法,而是面向典型越野地面的车-路作用特点有针对性地选择了分类所需的4 种特征量并设计了计算方法,同时利用LSTM 模型的数据拟合功能,以避免普通机器学习分类方法中需要大量数据统计量的问题,从而在大大简化分类算法的同时保证了算法的有效性。再进一步,针对机器学习分类方法输出结果离散和实际行驶过程中地面变化连续的特点,本文中提出了基于隐马尔可夫模型的分类结果后处理方法,提升了分类算法在汽车行驶过程中产生的连续数据上的分类正确率,相比未经后处理的分类算法,本文算法在真实越野行驶数据上更具实用性。
1 分类特征量的设计
根据地面车辆系统设计理论,地面车辆的运行条件可以分为包含柏油路与水泥路的硬表面公路、条件良好的土路、乡村土路、圆石、碎石与沙砾路和无路地区等。地面的力学性能和地表几何形状会直接影响车辆的使用性能。本文中主要考虑了土壤可变形性带来的土壤滚动阻力的影响、越野路面附着条件对车轮滑动状态的影响和地面不平整度几个方面的特征作为路面分类输入。
1.1 地面不平整度特征
基于簧载质量垂向加速度及其推导出的等效地面轮廓信息构建地面不平整度特征。地面等效轮廓()计算流程如图1所示,主要步骤为:(1)利用组合惯导采集车身后轴上方的车身垂向加速度()和车辆的行驶里程();(2)利用()根据1/4车辆模型估计地面高度随时间变化的函数();(3)对()根据()进行插值,得到地面的高度随车辆里程的变化曲线()。
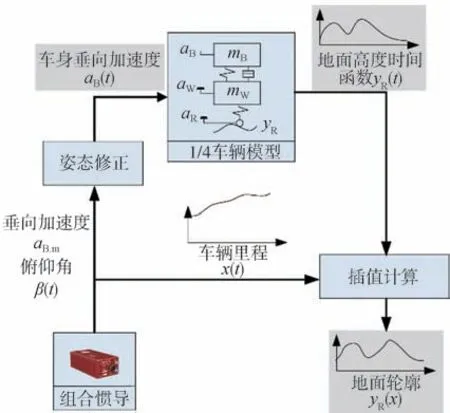
图1 地面轮廓生成流程
需要说明的是,由于实际测得的垂向加速度值是4 个车轮垂直位移输入的综合作用结果,()的数值与真实地面高度并不完全吻合,但是其仍然能有效反映地面的不平整度特征,因此将它定义为等效地面轮廓()。()相比()具有不受车速影响的特点,鲁棒性强更适宜用于地面的分类。
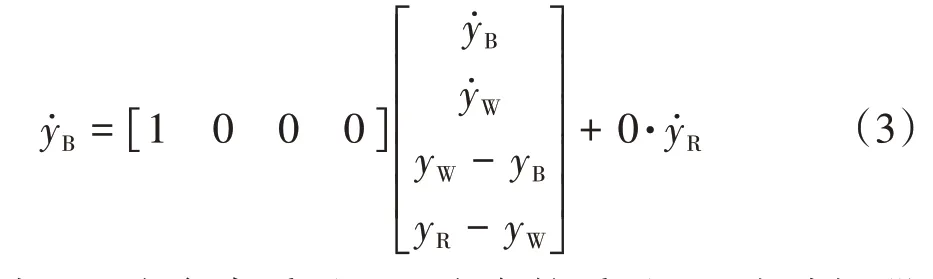
(1)垂向加速度信号采集
本文中利用在车厢内后轴上方位置刚性安装的组合惯导装置OxTS RT3002作为簧载质量垂向加速度数据的采集设备。该设备可同时测量车身各向速度分量、加速度分量和姿态角。由于本文中的研究主要面向的是具有纵向角度变化的地面,地面轮廓的估计也主要是沿着车辆的行驶方向,因此本文中主要使用了组合惯导所输出的垂向加速度()、大地坐标系下的车身俯仰角(),并实时估计车辆的纵向行驶里程()用于等效轮廓的计算。车辆垂向加速度测量的准确性决定了后续等效地面轮廓估计结果的正确性。为去除()中由地面起伏、悬架带来的车身俯仰角和俯仰方向的惯导安装误差的重力分量的影响,得到仅由于地面不平带来的车身振动信息,对()进行修正,得到地面垂直振动激励下的簧载质量垂直振动加速度():

式中为重力加速度。
(2)地面高度变化时间历程估计
本文采用的1/4车辆模型如图2 所示。

图2 本文所采用的1/4车辆模型


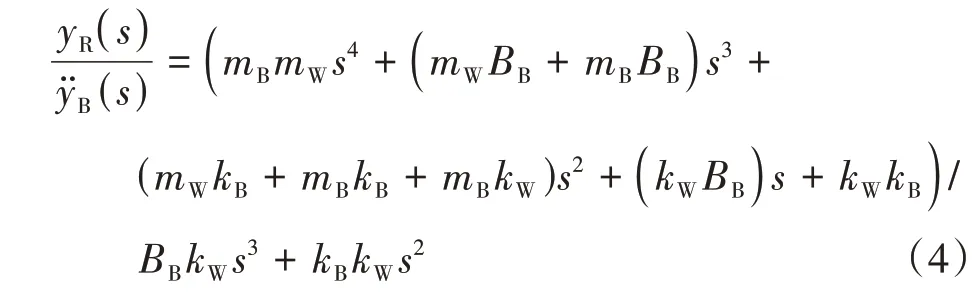
(3)等效地面轮廓计算
由于本文中的惯导设备所采集的加速度更新频率为100 Hz,因此以0.01 s 为周期利用式(4)推算地面高度。本文中采集设备的里程计在车速低于0.2 m/s时不会累加里程,而且里程计采集里程的周期为0.01 s,因此本文中采用0.002 m为距离步长对地面轮廓进行插值。根据相关研究经验,本文采取每4 m里程为一个数据段,以0.002 m为步长对地面轮廓进行估计。
为了得到地面轮廓的功率谱密度值,利用Welch 法估计()的功率谱密度。除了地面等效轮廓外,车身垂向加速度信息的变化中同样蕴含了地面特性信息,因此本文采用数据段内的地面轮廓的功率谱密度和车身垂向加速度信息作为用于地面分类的不平整度特征量。
1.2 地面力学特征
对地面的力学特征最直接的获取方法是采用车轮的六分力传感器直接测量车轮的受力情况,根据受力情况推算分类特征。但是六分力传感器价格昂贵,并且需要在车外车轮部分安装。本研究的行驶环境涵盖大量的狭窄区域,这种布置形式很容易造成传感器的损坏,大大增加研究成本。因此本文利用文献[8]的算法,推算车辆行驶滚动阻力和轮速波动量作为能够体现地面软硬程度的地面力学特征。
按图3 所示的汽车受力示意图,滚动阻力可根据经典的汽车行驶方程式计算得到:

图3 汽车行驶方程式示意

式中:为行驶阻力;为驱动力;为坡度阻力;为加速阻力;为空气阻力。
轮速波动指标为车辆4 个车轮的轮心速度和轮缘速度的差值随时间变化的平均值,表征车轮打滑的程度:
式中Δ表示每个车轮的速度差值随时间的变化,下角标指代4 个车轮,1 为左前轮,2 为右前轮,3 为左后轮,4 为右后轮。式(8)中的δ表示车轮的速度差,其随时间的变化Δ通过当前时刻的速度差δ()和前4 个计算时间步的速度差δ(-4)相减得到,如式(7)所示。4 个车轮的轮缘速度实际是指的车轮转速与车轮半径的乘积,由车载轮速计测量得到,可以通过车载CAN 总线直接读取。4 个车轮的轮心速度v需要通过如图4 所示的8 自由度车辆动力学模型计算得到:
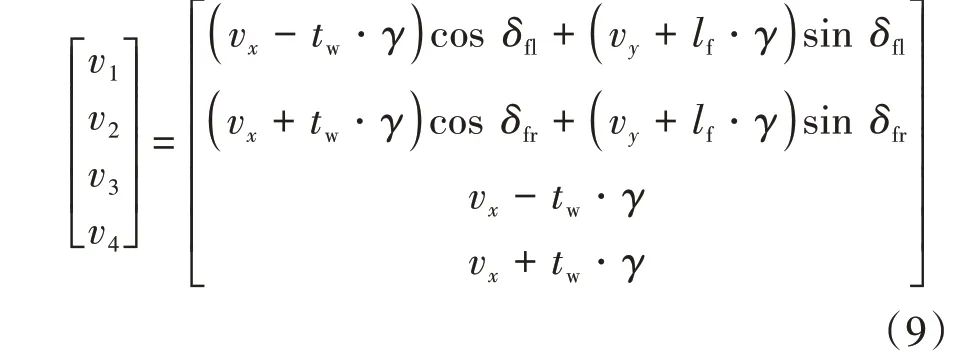
式中以及图4 中:v是车辆的纵向速度;v是侧向速度;是车辆质心至前轴的距离;是车辆质心至后轴的距离;是车辆横摆角速度;是轮距一半;和为车辆转向时左、右前轮转角。在本文中,两个前轮转角取相同的数值,均通过转向角推算得到。

图4 计算轮速波动时使用的8自由度车辆动力学模型
为了使得本文中的力学特征和不平整度特征能够实现同步,滚动阻力和轮速波动特征也利用了()插值,使其与不平整度特征在同样的里程尺度上采样。
2 越野地面分类算法的构建
由于本文中所采用的行驶数据为越野条件下自行采集的自然驾驶数据集,道路条件包括沙地、山区土路、水泥路和冰雪地等,涵盖了不同速度、不同坡道以及转向和直行等行驶工况。本文采用拟合能力强、适合处理时间序列的循环神经网络(RNN)构建越野地面分类算法,相比于普通的神经网络,RNN可以将不同时间步的数据在模型中的参数进行共享,由此建立时间序列中相邻时间步之间的联系,进而实现时间序列的建模,在驾驶数据建模领域有着广泛应用。相比以数据特征统计量作为输入的普通神经网络方法,RNN 方法可以更加充分地挖掘所采集的越野条件自然驾驶数据蕴含在时间序列中的各类特性。
本文采用了经典的RNN 时间序列分类网络架构,如图5 所示。时刻对应的输入数据序列()经过输入层,输入到RNN 的隐含层;隐含层通过网络单元对输入进一步提取特征,将最终提取的序列特征经过全连接层、Softmax 层和分类层转化成该输入对应的输出类别C。由RNN 建立的越野地面分类模型可以将所有不同类别的车辆行驶特征数据一并输入到模型中进行训练,最终生成统一的模型实现不同类别数据的分类。
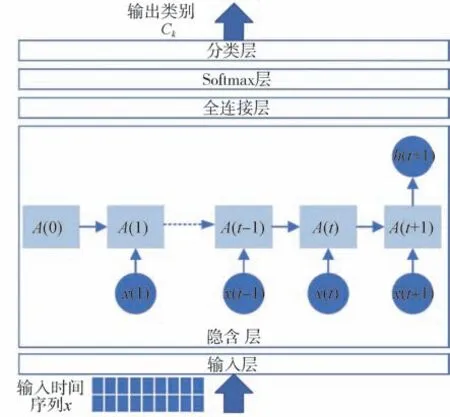
图5 本文采用的RNN网络结构
Softmax 层的数值是利用全连接层输出的类别特征统计得到,其计算公式为

式中:为第个典型类别(本场合指路面)的全连接层输出;为典型类别的个数,本场合=4。利用LSTM 网络Softmax 层中各类别对应的Softmax 值作为分类得分score:

近年来,RNN 网络的变体长短期记忆(long short-term memory,LSTM)取得了广泛应用。这种网络变体在网络单元的部分有着更复杂的实现方式,使得RNN 能更好地处理时间依赖问题。因此本文中选用LSTM 实现地面分类。本文中,须设置的LSTM 结构主要参数就是隐含层LSTM 核心的数量,模型内部参数可根据训练数据学习得到。
本文中的分类特征量需要处理为LSTM 可直接处理的输入样本。本文中输入到LSTM 中的特征量为等效地面轮廓功率谱密度、车身垂向加速度、滚动阻力和轮速波动特征。输入样本的时间跨度为车辆连续行驶4 m 过程中所经历的时间。由于车辆行驶过程中,该时间跨度在不同样本上不尽相同,因此即便传感器数据是按照固定时间步长采样的,不同输入样本中时间点的个数也不相同。本文的目的是分析地面的空间域特性,因此须在相同的空间采样频率下构建样本。为了保证样本采样方式的一致性,本文中对、和采用与处理等效地面轮廓时类似的方法,对变量进行插值以获得等距离采样,在1 m范围内计算500个空间采样点。
3 分类结果后处理算法设计
由于分类算法的准确率不可能达到100%,其在车辆连续行驶过程中的分类结果不可避免地会发生跳变,因此须对分类结果进行后处理。本文利用一种在时间上开展概率推理的贝叶斯网络架构设计后处理算法。
对于本文中的地面分类问题来说,地面的真实类别是伴随着车辆行驶过程而变化的一系列信念状态。这种信念状态随时间的变化满足1 阶马尔可夫过程,以转移模型描述其状态随时间变化的稳态过程,即其信念状态满足条件分布:

对于每一个时间上的信念状态X,在真实世界都可以观察到相应的证据变量E,证据变量和信念状态之间满足传感器马尔可夫假设:

在本文的后处理算法中,将分类算法抽象成对真实世界进行观测的传感器,随时间输出证据变量E;被观测的地面的实际类别则是信念状态X;后处理算法的本质就是根据到当前时刻的所有证据变量计算当前信念状态的后验概率分布(X|),可以通过递归估计进行推理:

式中:为使概率和为1 的归一化变量;(e|X)为传感器模型;(X|x)为状态转移模型;(x|)为当前推理时刻的先验模型。证据变量E和信念状态X的取值为4类待分类的地面,属于离散值,因此可以利用正向传递的隐马尔可夫模型(hidden Markov model,HMM)对该过程进行建模,该方法又称离散贝叶斯滤波方法。给定传感器模型、状态转移模型和先验模型,即可通过前向算法计算信念状态的后验概率分布。构建一个隐马尔可夫模型需要确定3 个参数,即各个隐状态的先验分布向量(x|),记为,各个隐状态之间的转移矩阵(X|x) 记为,和隐状态的观测概率(e|X),记为。
本文中提出的后处理算法中,利用转移模型表征分类算法出错的可能性,利用传感器模型表征待分类地面与分类算法训练样本之间的差异性,兼顾上述的两种分类结果跳变原因。本文中为了考虑越野地面的类别混杂性,采用具备个步长的HMM模型进行分类结果后处理,若分类算法以10 Hz运行,后处理算法可以对=0.1(单位:s)时间内所有分类结果进行后处理得到统一的分类结果。
本文中采用上一次HMM 推理得到的最终后验概率分布。分类算法测试验证的混淆矩阵记为
式中元素m表示标签为却被分类为的样本数。将混淆矩阵按列归一化后,再进行转置,即得转移矩阵。
4 算法实现与结果分析
本文中使用的数据是利用图6 所示的实车平台采集的越野环境自然驾驶数据,车辆状态通过车载CAN 总线读取或利用组合惯导RT3002 设备测量得到,最终数据通过Vector VN1630设备统一采集。从自然驾驶数据中选取车辆纵向速度大于零的部分,截取互不重合的长度为4 m 的数据段作为样本,最终截取了2 327 沙地数据段,1 082 个土路数据段,635 个水泥路数据段和1 101 个雪地数据段,每个数据段包含2 000个数据点,所有数据都根据取值范围归一化到[-1,1]之间。

图6 本文的数据采集平台和采集场景
由于越野场景存在较大的随机性,本文中采用5 折(5-fold)交叉验证方式进行模型的验证。将所有样本平均分为5 份,依次提取一份作为测试集,其余的作为训练集,最后统计所有5 次的测试结果作为最终的模型总体测试结果。为了提升训练速度,从第2 次训练开始,每1 次都采用上1 次的训练结果作为训练初始值。为了评价算法的性能,采用正确率指标,即分类正确的样本个数占所有被分类样本个数的比率。
4.1 LSTM模型参数的影响
为了分析LSTM 结构参数对地面分类算法正确率的影响,本文初步选取了等效地面轮廓功率谱密度、车身垂向加速度、滚动阻力和轮速波动特征作为分类特征。选取了多种LSTM 核心数量的网络结构,以同样的数据和同样5 折交叉验证训练并验证模型,取得的结果如表1 所示。当LSTM核心数量为50 个时,算法具有最高的分类正确率,可达95.5%。对沙地、土路、水泥路和雪地来说,达到最高分类准确率对应的LSTM 核心数量分别为55、55、50 和50 个。因此,在本文所测试的LSTM 核心数量配置当中,50个LSTM核心为最佳的配置。

表1 不同的LSTM核心数量对地面分类算法正确率的影响
4.2 输入特征的对比
为了验证本文中提出的使用不平整度特征和力学特征进行越野地面分类的有效性,采用不同的特征搭配来搭建分类模型并用相同的数据测试其效果,5 折交叉验证的结果如表2 所示。表中LSTM 核心数设置为50个。表2中对比了单独使用地面不平整度特征、单独使用地面的力学特征和同时使用不平整度特征与力学特征对分类正确率的影响。由表可见,单独采用地面不平整度特征对水泥路和雪地分类能力最差,单独采用力学特征对土路和雪地的分类能力最差,同时采用两种特征之后总体分类正确率有所提升,对沙地和水泥路的分类准确率超过使用单项特征的最好水平,土路分类准确率接近最高水平,雪地的分类准确率则比最高有所下降。总体来说,同时使用地面不平路特征与力学特征对越野地面分类算法可以取得更高的总体分类正确率。
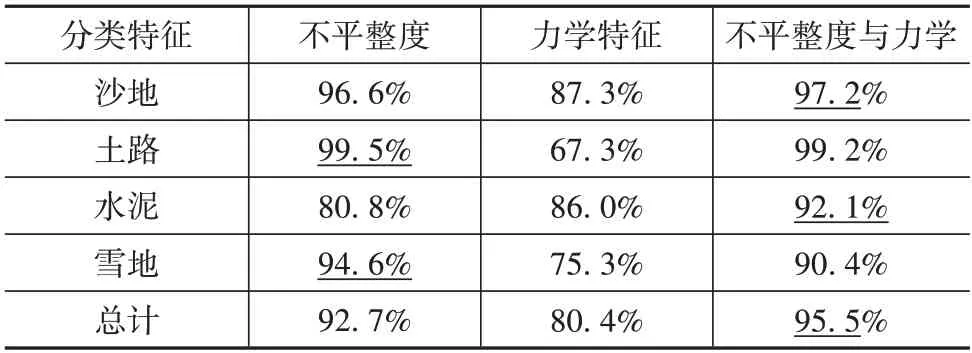
表2 不同分类特征组合的效果对比
4.3 与其他典型分类算法的对比
为了验证本文所提出基于LSTM 的越野地面分类算法的有效性,搭建具有相同输入样本的高斯混合隐马尔可夫模型(GMM-HMM)来进行地面分类(图7)。GMM-HMM 广泛应用于语音识别、驾驶行为识别等领域,与LSTM 一样可以输入整段时间序列进行建模。与LSTM 模型不同的是,使用GMMHMM 算法进行地面分类的过程中,须对每一个类别地面对应的时间序列分别搭建GMM-HMM 模型,利用前向-后向算法求解待分类序列与每一个类别模型的似然率,即相似程度,最终选取最相似的类别作为分类结果。
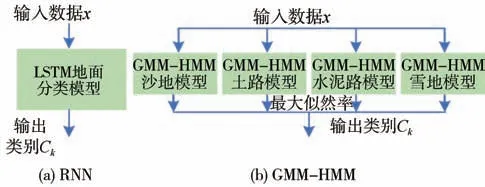
图7 RNN与GMM-HMM用于地面分类的开展方式的对比
本文中建立了相应GMM-HMM 模型实现越野地面分类,同时使用地面不平整度特征与力学特征的模型作为模型输入,同样采取5 折交叉验证的方式来开展算法的训练和测试验证。同时,在样本均为2 000个采样点的前提下,本文中采用不同的隐状态数和不同的高斯混合模型混合数作为GMMHMM模型结构参数,对比模型分类性能,结果如表3所示。
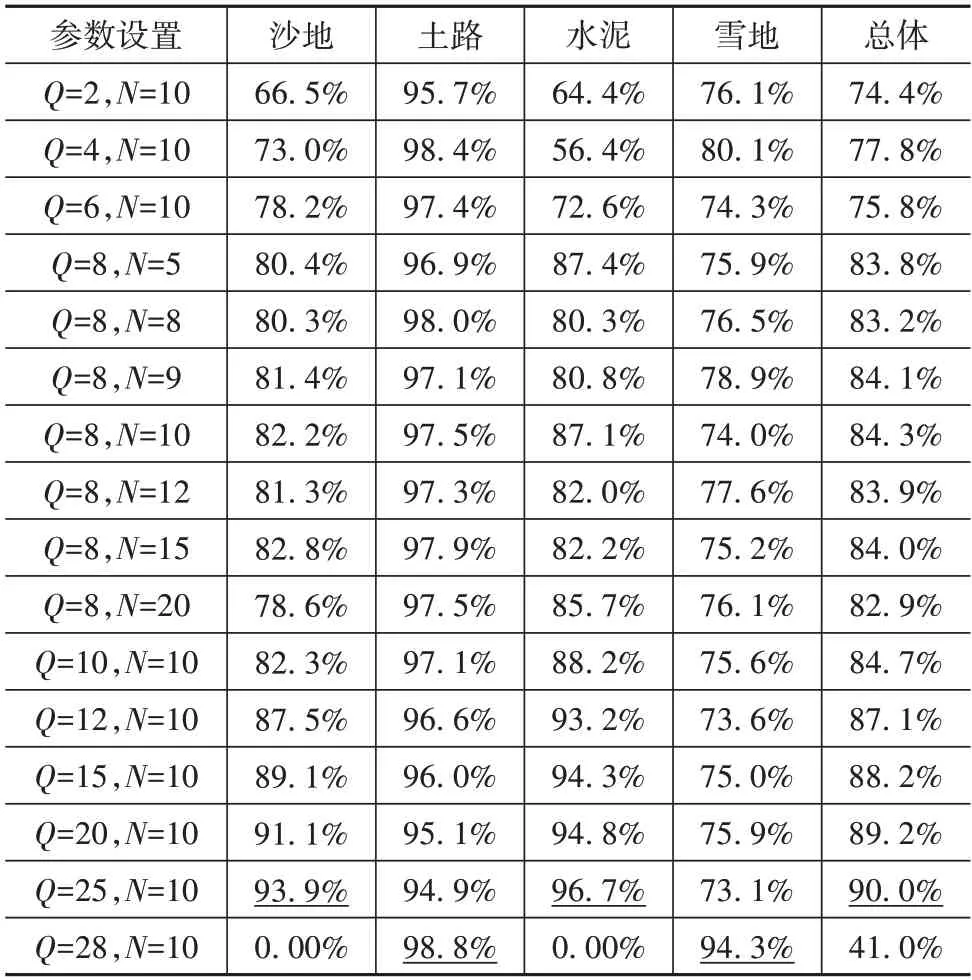
表3 不同参数的GMM-HMM 模型的地面分类算法正确率对比
由表可见,总体分类正确率最高可达90.0%,远低于LSTM 所达到的正确率。正确率整体呈现出随隐状态数增加而升高的趋势,在隐状态数达到28 时开始出现因隐状态数过大、算法多次训练过程中无法正确收敛的现象,最终出现模型正确率为0 的情况。本文在权衡模型的稳定性与分类性能后取隐状态数为25,高斯混合数则在10 个左右分类效果最好。
由表还可以发现,不同类别地面达到最高正确率的模型参数并不相同,但很接近。模型结构参数除对土路分类的影响较小以外,对其他类别道路分类的影响都比较大。由于GMM-HMM 模型支持对于不同类别选用不同的结构,因此针对每一种地面,选取正确率最高的模型配置,重新组成新的分类模型,其参数和测试结果如表4 所示。由表可见,重新构建的分类模型总体准确率为88.4%,相比于4 类路面采用=25、=10 并没有提升。这是因为GMM-HMM 模型通过数据与4个类别地面模型的相似程度进行对比来进行分类,单项类别分类正确率高的模型之间的差异不够明显,因此将其混合形成模型不一定能提高分类正确率。对比之下,LSTM模型的分类正确率大大高于GMM-HMM 模型,并且LSTM的实施过程和参数调整过程也较为简单。

表4 根据不同地面类别特点重新构建的GMM-HMM 模型的正确率对比
4.4 分类结果后处理算法设计的验证
本文采取核心数为50的LSTM 模型作为最终的地面分类模型,分类特征同时采用不平整度特征与力学特征。算法经过5 折交叉验证得到的混淆矩阵如表5所示。
根据表5可以得到相应的转移矩阵:

表5 本文最终选用的地面分类模型混淆矩阵

观测分布质量函数则利用每一次分类时Softmax层中的分数进行归一化计算得到。
在之前的数据集验证中,数据样本是随机抽取的,而实际行驶场景中,地形特征是连续的,车辆运动力响应也是连续变化的。因此,在实际情况下,造成分类错误的地面特征会连续出现,进而造成连续的分类错误;同时,连续驾驶数据采集过程中包含地面坡度变化和冲坡、急加速急减速等激烈驾驶行为,对车辆动力学响应特征造成一定的干扰,因此在某些情况下,连续数据会比分类算法的测试集数据造成更多分类错误。为了进一步验证分类算法和后处理算法的效果,选取在不同地面上连续采集的典型数据来进行后处理算法的验证。由于HMM 算法中采用的步长数对后处理算法效果有影响,采用2-25个步长对HMM 后处理算法的效果进行对比。结果是选用12 个步长时的后处理准确率最高。即连续数据中,以100 ms 为周期提取车辆先前4 m 距离窗口范围内的行驶数据,并排除存在车辆静止和倒车情况的无效数据窗口,在所有有效数据窗口上进行地面分类;利用相邻的12 次地面分类结果之间进行分类结果后处理。
为了验证本文提出的后处理算法的效果,分别在沙地(1 685次分类,1 674个后处理窗)、土路(2 854次分类,2 843 个后处理窗)、水泥路(6 138 次分类,6 127 个有效数据窗)和雪地(3 189 次分类,6 178 个有效数据窗)连续行驶数据上进行地面类别识别和分类结果后处理。结果后处理对算法正确率提升的效果如表6 所示。每一种地面的处理效果如图8 所示,沙地、土路、水泥和雪地依次被标记为1、2、3 和4,分类标签是根据采集场景标记的数据标签。

图8 连续数据上的地面分类结果
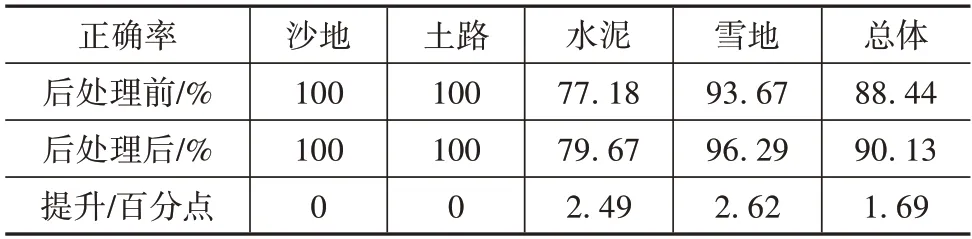
表6 后处理前后正确率的对比
表6 中后处理的正确率是以分类次数为基准,其数值为分类正确的分类次数与所有地面类别分类次数总和的比值。后处理后的正确率是以有效处理数据窗为基础,其数值为分类正确的数据窗占所有地面类别有效数据窗数总和的比值。由表6 和图8可见,对于没有产生错误的沙地和土路分类结果,后处理算法并没有产生额外的错误,而对于分类结果有误的水泥路和雪地,本文提出的后处理算法均提升了分类正确率,总体正确率由88.44%提升至90.13%,提升了1.69 个百分点,单类别正确率提升幅度最高的是雪地,达2.62个百分点。
5 结论
本文中对基于车辆动力学响应的越野地面分类方法进行研究。采用监督学习分类模型实现包括沙地、土路、水泥路和雪地的越野地面的分类。分类特征同时采用了地面不平整度特征与地面力学特征,采用了等效地面轮廓和车身垂向加速度作为地面不平路特征,选取行驶阻力和轮速波动作为力学特征。选取了LSTM 模型实现越野地面分类。该方法可以对时间序列进行整段建模和分类,无须人为定义输入数据的统计特征量。对比了不同网络核心数和不同特征组合得到的分类模型的效果,最终确定的核心数和分类特征可以使得分类算法达到95.5%的正确率。为了解决分类算法在同一种地面类别对应的车辆响应数据上分类结果产生跳变的问题,建立了基于HMM模型的分类结果后处理算法,可以综合考虑算法正确率的限制和越野地面随机性对分类结果的影响,使越野环境中连续行驶数据上地面分类准确率总体上从88.44%提升至90.13%。