天基穿冰雷达系统:机遇与挑战
2022-07-01胡洛佳眭晓虹袁春柱于志同陈卓奇崔祥斌稂时楠
胡洛佳 黄 彦 刘 敏 王 成 陈 亮 刘 露 眭晓虹 袁春柱 肖 鹏* 于志同* 陈卓奇 崔祥斌 赵 博 稂时楠 李 萌
①(中国空间技术研究院钱学森空间技术实验室 北京 100094)
②(中山大学测绘科学与技术学院 珠海 519082)
③(中国极地研究中心 上海 200136)
④(中国科学院空天信息创新研究院 北京 100094)
⑤(北京工业大学信息学部 北京 100124)
⑥(中国空间技术研究院航天东方红卫星有限公司 北京 100094)
1 引言
极地是地球环境系统的重要组成部分,反映和影响着全球气候与海平面的变化[1]。该区域的冰盖/冰架对全球气候变化最为敏感,响应最为剧烈,是气候变化的“指示器”与“放大器”。以南极地区为例,现有调查资料表明[2]:南极冰盖平均厚度约为2160 m,最大厚度超过4776 m,其冰储量约占全球冰川总量的90%,占全球淡水资源的70%左右。如果南极冰盖全部融化,其对海平面上升的贡献可以达到近58 m[3]。近年,受全球变暖的影响,南北极冰盖变薄,冰架的崩解和退缩加剧[4]。加深对冰盖动态变化机制的认识,并采取有效措施应对和减缓以上变化过程迫在眉睫。由于环境因素的制约,迄今为止,极地冰盖仍旧是地球上人类认识最为匮乏的区域之一。而人类准确预测未来海平面变化的最大不确定性,正是来自对冰盖动态变化机制认知的不足[5]。因此,当前亟需发展有效观测手段实现冰川、冰盖/冰架的覆盖面积、层析结构、运动变化的精细探测。
从20世纪中叶开始,遥感技术的使用提高了冰盖/冰架信息获取的效率和精度,大幅推进了极地科学研究发展[6]。其中,由于较强的穿透性和高精度测距能力,穿冰雷达成为冰川立体层析遥感的核心技术。穿冰雷达(Ice-penetrating radar),又称无线电回波探测雷达(Radio-echo sounder)或冰雷达(Ice sounding radar)(本文中统称为穿冰雷达),是基于电磁波理论,通过雷达回波研究冰雪介质特征的一种地球物理探测系统。电磁波在冰盖内部传播呈现弱衰减性以及冰盖良好的成层性和匀质性是穿冰雷达能够探测极地冰盖的理论基础[7]。相较于其他地球物理方法,穿冰雷达具有穿透能力强、精度高、信息量大等优点。经过几十年的发展,穿冰雷达载体由地基、车载平台发展至机载平台;垂直分辨率由数百米提高至分米级;发射信号频段、带宽和极化模式也日趋复杂。然而,极地气候条件并不利于以上载体开展持续性的高频次、高密度观测,导致遥感数据匮乏,从而限制了极地冰盖科学研究[8—12]。因此,发展具有宽覆盖、高重访、无人化特性的天基穿冰雷达系统,获取极地冰盖三维层析成像数据,为科学研究提供普查信息就显得尤为重要。
不同于传统成像雷达(例如:合成孔径雷达SAR)获取地表后向散射信息,穿冰雷达获取的是飞行测线下方冰体的立体剖面反射信号(如图1)。传统机载穿冰雷达在垂直冰面方向上,利用脉冲压缩技术实现高分辨率测深;在航迹向上,采用合成孔径技术实现高空间分辨率;而在垂直航迹向上,则依靠波束宽度或第一菲涅尔积分区区分目标,飞行器在一个固定区域内往复飞行,获取三维冰下信息。由于观测体制发生变化,低频电磁波还会穿透数公里的冰层,传播机理更为复杂、系统指标需求也更为苛刻,导致传统天基成像雷达观测系统尚无法实现穿冰探测。这使得依靠天基平台实现极地冰盖观测仍是天基微波遥感领域的空白。
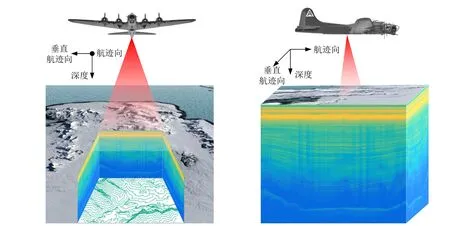
图1 机载穿冰雷达观测示意图Fig.1 Schematic diagram of airborne ice sounding radar observation
本文针对目前天基穿冰成像雷达系统设计面临的挑战,探索面向极地冰盖探测需求的天基穿冰雷达系统有效实施方案。具体而言,首先结合极地科研需求和穿冰雷达发展现状,阐述穿冰雷达在极地科研工作中的重要作用;其次,梳理分析天基平台下,穿冰雷达面临的3大挑战,包括:(1)电磁波传输过程的强衰减;(2)冰表面复杂的积雪杂波对冰底微弱回波的干扰;(3)观测高度提升带来的垂直航迹向分辨率恶化等。同时,结合现有天基雷达的新技术、新趋势,阐述天基穿冰雷达系统方案,并做出系统指标体系初步测算;最后,对该系统的未来发展和应用前景提出展望。
2 发展现状与科学需求
2.1 穿冰雷达系统演变历程
1933年,美国空军飞行员发现飞机雷达高度计在冰盖上空的读数不准,推测其原因是低频电磁信号对冰盖良好的透射能力。1957年,Waite[13]第1次利用雷达高度计观测到了南极Ross冰架的底部,拉开了使用低频电磁波观测数公里厚冰盖的序幕。
早期穿冰雷达研制国家主要集中于欧美地区。1963年,英国剑桥大学斯科特极地研究所(Scott Polar Research Institute,SPRI)的Evans[14]研制出第1台专用的穿冰雷达系统—SPRI Mark I 。此后,包括美国陆军电子实验室、美国地质调查局、美国埃迪科公司、苏联北极和南极科学研究中心、加拿大环境部、加拿大英属哥伦比亚大学、丹麦技术大学和冰岛大学在内的多家研究机构开始研制和使用穿冰雷达系统[7]。这些穿冰雷达系统以短脉冲体制为主,主要以探测冰厚和冰下地形为目的。1967—1979年,SPRI联合美国国家科学基金会(National Science Foundation,NSF)和丹麦技术大学(Technical University of Denmark,TUD),利用C130大力神运输机搭载其研制的SPRI-TUD穿冰雷达载荷,在南极冰盖展开了第1次大面积冰厚和冰下地形调查,测线间距为50~100 km,获得了数万个冰厚数据[15]。SPRI-TUD穿冰雷达工作频率为60 MHz和300 MHz,脉冲宽度250 ns,冰内垂向分辨率为40 m,最大探测深度超过4000 m。而后,该数据经过复杂的编译、插值处理,生成了第1幅南极冰下地形图[16]。
20世纪80年代起,数字信号处理和电子技术的发展极大地提升了第2代穿冰雷达系统的性能。脉冲压缩和相干信号处理提高了雷达的探测灵敏度和沿航迹向分辨率。美国堪萨斯大学(University of Kansas)研制了相干穿冰雷达系统(Improved Coherent Arctic Radar Depth Sounder,ICARDS),其中心频率为150 MHz,冰内分辨率5 m,最大探测深度超过3000 m[17]。1993年,美国航空航天局(National Aeronautics and Space Administration,NASA)和NSF在北极格陵兰地区开展了第2次大范围机载穿冰雷达调查,利用P-3B飞机搭载ICARDS及其后续穿冰雷达载荷探测冰厚和冰下地形,其中90%的测线探测到基岩面,沿航迹向分辨率达到150 m[18,19]。
进入21世纪后,穿冰雷达系统开始向多频段、多极化、多通道方向发展,获取了更加丰富的冰下信息。例如,堪萨斯大学研制的多频带合成孔径雷达(Multiband Synthetic Aperture Radar,MSAR)可以在75~85 MHz,140~160 MHz和330~370 MHz等3个频带范围内工作,通过搭载1个发射机和2个接收机用于同时获取冰的前向和后向散射信息[20];日本国立极地研究所(National Institute of Polar Research,NIPR)研制的穿冰雷达系统,工作频率分别有30 MHz,60 MHz和179 MHz,同时获取水平和垂直极化信号,可以探测冰层密度和深部冰晶组构差异[21]。
2009年起,为了弥补冰、云和陆地高程卫星(Ice,Cloud,and land Elevation Satellite,ICESat)失效后的极地观测空白,NASA启动了规模庞大的“冰桥”计划(Icebridge)[22],使用P3-B和DC-8飞机搭载多型传感器,对南极和格陵兰岛展开了大规模密集观测。其中,堪萨斯大学冰盖遥感中心(Center for Remote Sensing of Ice Sheets,CRESIS)研制的多通道相干穿冰雷达探测仪(Multichannel Coherent Radar Depth Sounder,MCoRDS)是最为重要的载荷之一。经过约10年的持续观测,“冰桥”计划获取了丰富的极地三维变化信息,有效促进了冰冻圈科学研究。该计划直到NASA第2代激光高度卫星ICESat-2在轨顺利运行后才终止,彰显了极地研究对时间分辨率和持续观测的迫切需求。
伴随着穿冰雷达发展,极地冰盖的水平分辨率和垂直深度测量精度不断提高,应用范围不断扩大。例如,穿冰雷达探测得到的极地等时层信息被用于深冰芯钻孔位置选定,并且与深冰芯结合,进行冰雪沉积过程反演、冰层与冰芯年代修订、冰层与冰盖积累速率重建、冰层与冰流动力学等方面的研究[23]。
2.2 国内穿冰雷达系统发展
我国在2004年第21次南极科考中,首次使用了NIPR研制的车载双频穿冰雷达系统,对中山站到南极冰盖最高点Dome A的断面区域开展观测[24];在第24次南极科考中,利用改进后的NIPR系统,获取了约5000 m的冰下信息,探深精度约10 m[25];在2009年第26次南极科考中,中国科学院电子学研究所研制的国产首台车载穿冰雷达系统成功获取了3000 m冰下信息(如图2),为南极中山站新机场建设提供了重要的科学数据;2015年,中国极地研究中心首次引入固定翼飞机平台开展南极考察,这架飞机被命名为“雪鹰601”(如图3),并根据极地运行和地球物理考察需求进行了特殊的改装[26]。

图2 南极冰盖层析图像(中科院电子所穿冰雷达系统)Fig.2 A tomographic image of the Antarctic ice sheet obtained by the ice sounding radar developed by the Chinese Academy of Sciences

图3 “雪鹰601”科学调查平台Fig.3 “Snow Eagle 601” scientific investigation platform
“雪鹰601”的引入使得我国极地冰下信息获取能力大幅提升,其中较为突出的成果是弥补了国际上对南极“伊丽莎白公主地”冰下观测的空白[27]。至今,我国穿冰系统正在极地观测领域发挥着相当重要的作用,并且我国自主获取的遥测数据也被正式纳入国际南极冰下测绘项目Bedmap3中。
2.3 穿冰雷达系统发展需求
经过近60年的发展,地基、空基穿冰雷达系统已经日趋成熟,提供了丰富的极地冰下信息。然而,由于恶劣天气和平台观测距离的限制,极地仍存在较大的观测盲区。针对测线不足的问题,科学家使用地形插值技术和多源遥感数据融合反演等方法弥补数据空缺[28—30]。然而,这些基于模型计算得到的结果在空间网格和数字高程上误差较大。以英国南极局2013年公布的第2代Bedmap数据集为例[28],约有40%的极地区域存在实测数据空白;通过数据融合和相关处理,空间网格精度提升至1 km2,但局部冰盖厚度误差依然在数十米以上(如图4)。此外,Bedmap近10年更新一次的极地冰下数据库,也远远不能满足气候科学研究需求[31],特别对冰盖快速演变、短期动力学等方面的研究依然存在较大不确定性。
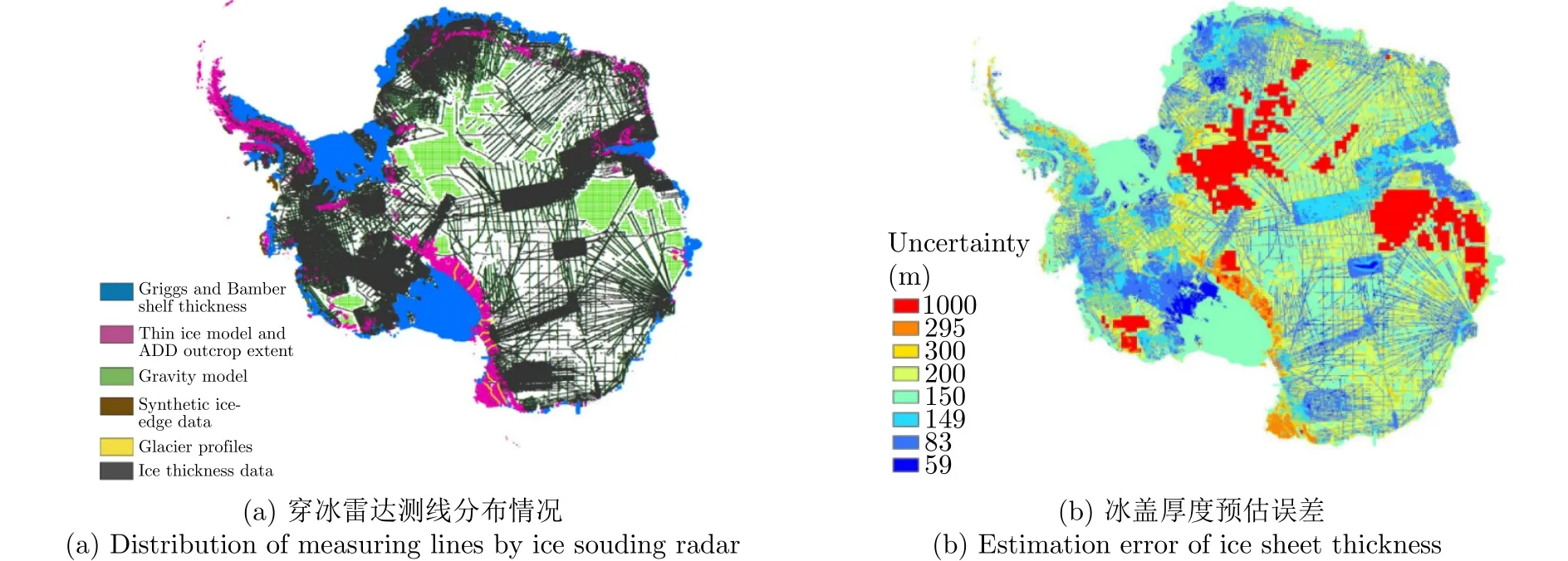
图4 Bedmap2数据库示意图[28]Fig.4 Bedmap2 database diagram[28]
受制于冰盖立体探测数据的缺失,在模式建立方面陆冰模式与陆地模式依然是单向的,即陆冰模块只从陆面模块获得初始场,但是冰对地形的改变等不会进一步传递给陆面模块[32,33]。国际上冰川系统模型(包括冰川底部物理化学过程及其水文演化过程)的建立研究迫切需要更精细的观测数据描述冰盖变化,以提高模式模拟冰川和冰盖对气候变化的敏感性。具体要求为[34]:(1)在冰盖边缘的复杂流动区及陡峭区域中,模拟极地冰盖需要1 km的水平分辨率;(2)对于山谷冰川,输入场及冰动力过程的模拟可能需要100 m的水平分辨率,如果我们希望模拟出冰川末端的年际变化,需要的水平分辨率甚至达到10 m;(3)对于改进气候与冰盖模式的耦合技术,需要季节性时间尺度的冰川、冰盖动力过程观测数据。
2001年,NASA和NSF联合资助堪萨斯大学等多家科研机构发起“极地冰盖探测雷达”(Polar Radar for Ice Sheet Measurement,PRISM)研究计划[35]。该计划致力于设计和研制革命性的雷达探测传感器网,观测极地冰盖关键参数,进而研究极地冰盖对全球海平面升高的影响。其核心科学测量体系如表1所示。表中所示的7个关键测量参数中,有3个需要使用穿冰雷达作为主要探测手段,可见其在极地研究中有着非常重要的地位。而对于现有的穿冰雷达发展和观测能力来说,满足以上指标需求尚存在较大的难度。

表1 PRISM科学测量体系[35]Tab.1 PRISM scientific measurement system[35]
2.4 天基穿冰探测空白
利用天基平台对极地冰盖进行季节尺度观测可以极大弥补目前极地冰盖科学研究数据的不足。从联合国气象组织全球冰冻圈观测(World Meteorological Organization-Global Cryosphere Watch,WMO-GCW)中的天基冰冻圈观测计划中可见[36](如图5):在冰冻圈表面关键参数测量方面(光学、SAR和高度计等),现有天基能力已经足够成熟,可以提供完备的观测数据;但极度缺乏厚度观测和层析观测能力,依靠重力仪等大尺度厚度观测结合表面参数进行联合反演存在较大误差。此外,在可预见的天基系统发展计划里,并没有包含针对厚度和层析观测的相应载荷。因此,天基穿冰探测仍是国际空白领域,具有极大发展空间。
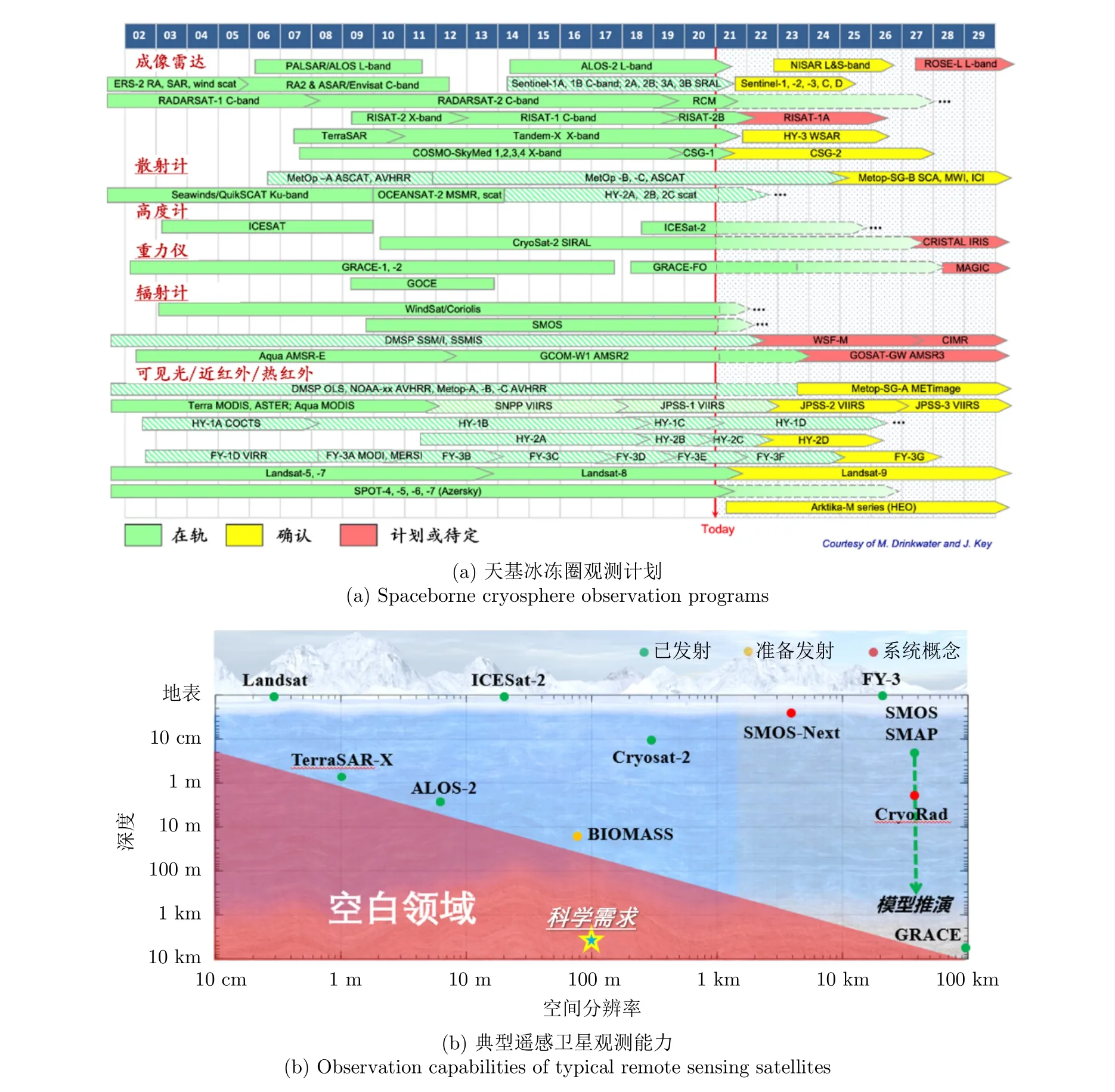
图5 WMO-GCW天基冰冻圈观测计划及能力[36]Fig.5 WMO-GCW spaceborne cryosphere observation programs and capabilities[36]
天基穿冰雷达的概念源自行星次表层探测计划,其利用低频雷达载荷穿透灰尘、土壤等覆盖物,意图探测月球、火星等行星上可能存在的水资源等。例如:欧空局/NASA的“木卫二”探测计划[37]、欧空局“Rosetta”探测计划[38]以及我国“天问一号”[39]等,都将次表层探测雷达作为重要科学探测载荷纳入实施计划中。其中,最具代表性的是欧空局的“火星快车”计划所携带的火星次表层及电离层探测雷达[40](Mars Advanced Radar for Subsurface and Ionosphere Sounding,MARSIS),以及NASA火星勘测轨道器所搭载的浅地表雷达[41](SHAllow RADar,SHARAD)(如图6)。受制于平台搭载能力和功耗限制,两型雷达都使用了高折展比的棒状天线,并将载频选择在HF频段。极低的载频使得这类雷达载荷在较小的发射功率和天线增益的条件下依然具备了穿透数百米深度地表的探测能力。

图6 火星探测雷达Fig.6 Mars sounding radars
在获取有效行星探测数据后,美国喷气推进实验室(Jet Propulsion Laboratory,JPL)等组织开始规划利用该种载荷开展对地观测,并进行了大量的机载飞行试验,提出了干旱次表层和冰盖轨道探测器(Orbiting Arid Subsurface and Ice Sheet Sounder,OASIS)[42]。考虑到地球电离层的严重影响,OASIS将载频提升至45 MHz,即便如此系统也仅能在电离层出现平静窗口时才能开展有效观测,且发射信号带宽有限[43]。
图7 JPL OASIS计划Fig.7 JPL’s OASIS program
以上3个典型载荷相关参数见表2。在航迹向上OASIS采用了与MARSIS相同的直接累积方法,这就意味着OASIS系统仅能针对相对均匀的目标开展观测,且对地表杂波干扰无能为力。此外,OASIS系统的垂直航迹向分辨率也没有做出明确说明,仅能依靠轨道间隔作为区分,这也会带来较大的误差。在综合考虑空间分辨率、地表杂波干扰、收发增益等一系列问题后,该计划将沙漠地下水观测调整为首要任务[45]。
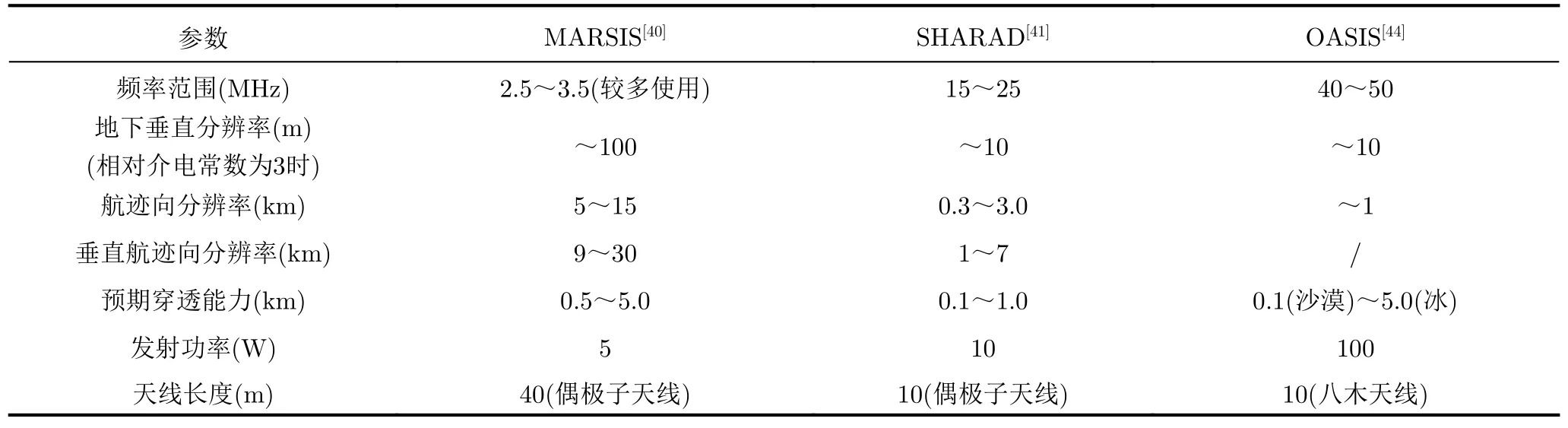
表2 次表层探测雷达卫星参数Tab.2 The paramenters of sounding radar satellites
综上可见,受制于单星负载能力的限制,使用经典的单站式雷达进行穿冰探测困难较大,几乎不可能达到百米量级的空间分辨率和数公里的冰盖穿透能力需求,采用新型探测原理和遥感技术势在必行。
3 天基穿冰雷达系统挑战
为实现天基穿冰雷达系统,尚存在多个问题需要解决,本节将集中讨论其中最为关键的3个因素。
3.1 传输衰减
采用正下视合成孔径观测模式,依据雷达方程计算穿冰雷达系统的信噪比为
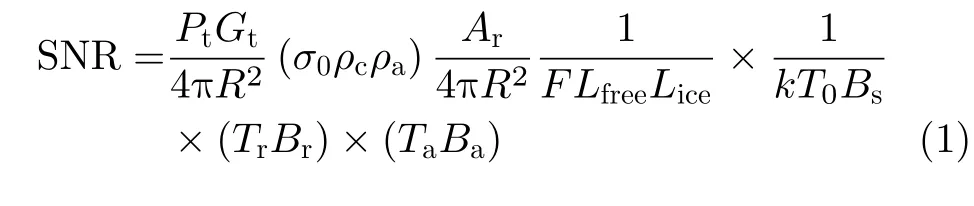
其中,R为雷达等效作用距离,Pt为峰值发射功率,Gt和Ar分 别为天线发射增益和接收电尺寸,σ0为探测目标的反射系数,ρc和ρa分别为垂直航迹向分辨率和航迹向分辨率,F和Lfree为系统损耗和自由空间传输损耗(一般认为是5~6 dB),Lice为冰衰减,k为玻尔兹曼常数,T0为系统工作温度,Bs为采样率,Tr和Br分别为发射信号脉宽和带宽,二者乘积是脉冲压缩增益,Ta和Ba分别为合成孔径时间和多普勒带宽,二者乘积是合成孔径处理增益。
其中,Pavg为平功发射功率,Gr为接收天线增益。穿冰雷达系统传输衰减主要由自由空间传输衰减和冰介质衰减两部分构成:相较于空基穿冰系统,天基系统自由传输衰减高约90 dB;而相较于传统天基成像雷达,穿冰雷达载荷需要额外面对数公里深的冰层衰减。
对于载荷能力有限的天基平台,极地冰盖冰衰减的预估是系统能量链路设计的关键环节。由麦克斯韦方程可以推得非磁介质中电磁波的衰减系数α为[46]

其中,f0为电磁波频率,µ0和ε0分别为真空中的磁导率和介电常数,εr和γ分别为介质的相对介电常数和电导率。为了便于计算,往往使用

来衡量冰衰减情况[47]。其中,冰的电导率γ和相对介电常数εr的计算是一个较为复杂的过程,与冰密度、深度、厚度、内含的离子浓度等多个因素相关联,无法通过一个常数来直接决定。
利用经验公式[48],可以通过冰温Tice计算得到冰的相对介电常数

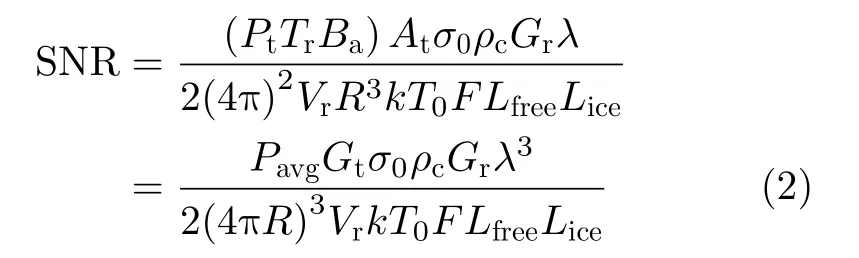
冰的电导率γ由两个部分相加组成:一部分是由纯冰产生的电导率γpure,另一部分是由冰内的酸性离子[H+]和盐性离子[Cl—]等杂质所产生的电导率γimpure。其中,依据文献[47]所提出的经验公式可以得到纯冰电导率

其中,参数A,B和C利用查表3方式得到。
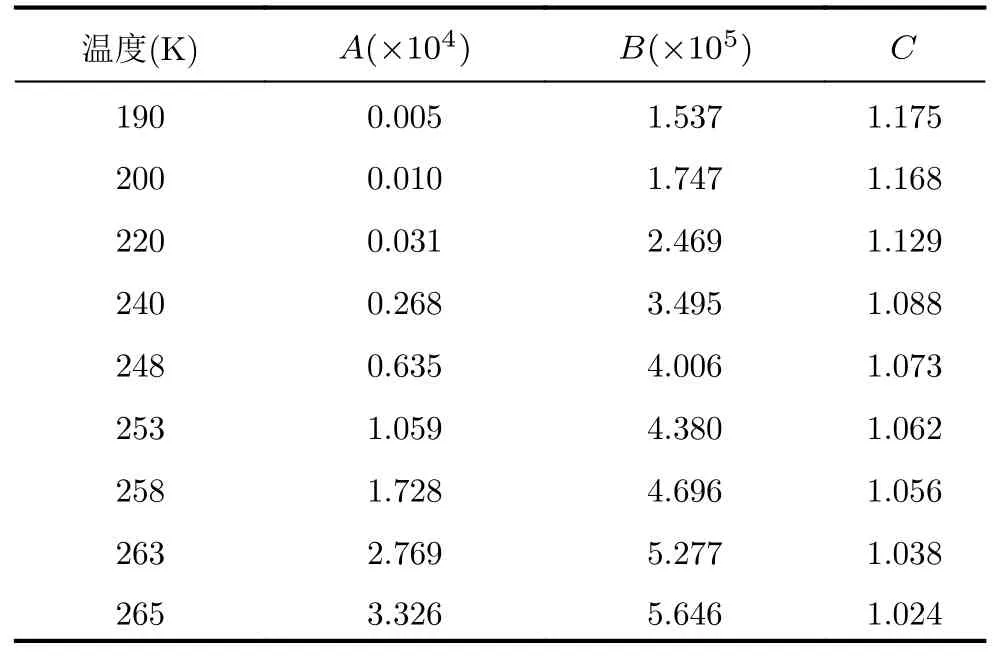
表3 Fujita参数表1[47]Tab.3 Fujita parameters table 1[47]
非纯冰电导率较为复杂,综合多个研究中构建的模型[47,49,50],将其描述为

其中,Iimpure为冰内离子浓度,在理想情况下可以通过酸、盐离子浓度计算得到Iimpure=[H+]+0.134[Cl-] µM;γ251为温度在251 K条件下电导率,近似为γ251=3.2Iimpure(µs/m);参数a和b可以查表4得到[47];此外,Tc=2.32×103K。根据文献[50]中的统计,将南极地区的冰内离子浓度视为常数[H+]=2 µM,[ ssCl-]=4 .2 µM。由此推算可得Iimpure=2.56 µM及γ251=8.2 µS/m 。

表4 Fujita参数表2[47]Tab.4 Fujita parameters table 2[47]
至此,冰衰减的未知量仅剩冰温分布Tice,该数值也是众多环境参数中最为重要的一个。依据热力学模型,在忽略水平扩散影响,并认为冰内温度场稳定的情况下,冰温分布Tice依赖该层面的深度d,可表示为[51]

其中,ρI为冰密度,cI为冰的热容,kI为冰的热导率,vd为 垂直冰流速,和τ分别为冰内的有效应变率和剪应力。
式(8)的边界条件为冰面温度Ts以及冰底温度梯度

其中,G为地热通量,τb=-ρIgD×∇s为冰底部剪应力(g为引力常数,D为冰厚度,s为冰面高度),vb是底部滑动速度(可由文献[52]所提方法估算)。基于边界条件,可以估算冰底温度Tb。特别地,如果冰盖层较厚,使得Tb达到了压熔点,则冰温不再随着式(8)连续变化,保持为

在冰海交界面处,冰架底部温度被视为海水温度Tb=—2°C,需要根据实际情况选择。
如果仅考虑温度的垂直扩散和对流情况(可能导致温度估算偏低),则可得到冰温的解析解[51]

其中,分子热导率κ ≈1.14×10-6m2s-1,vs为冰盖表面积累率。
根据南极数据库[53],可以测算得到不同频率下南极冰盖的冰衰减分布情况(如图8)。从图8(a)可见,随着频率增高,冰衰减急剧增大,在L波段(约1.2 GHz)时需要对抗100 dB以上的冰衰减;而在VHF波段(30~300 MHz)冰衰减的变化较小,但依然需要考虑70~80 dB以上的冰衰减才能实现98%以上南极区域的有效探测(该结论与文献[54]所述结果相符),此载频条件下冰盖会带来15~20 dB/km的双程衰减(如图8(b))。
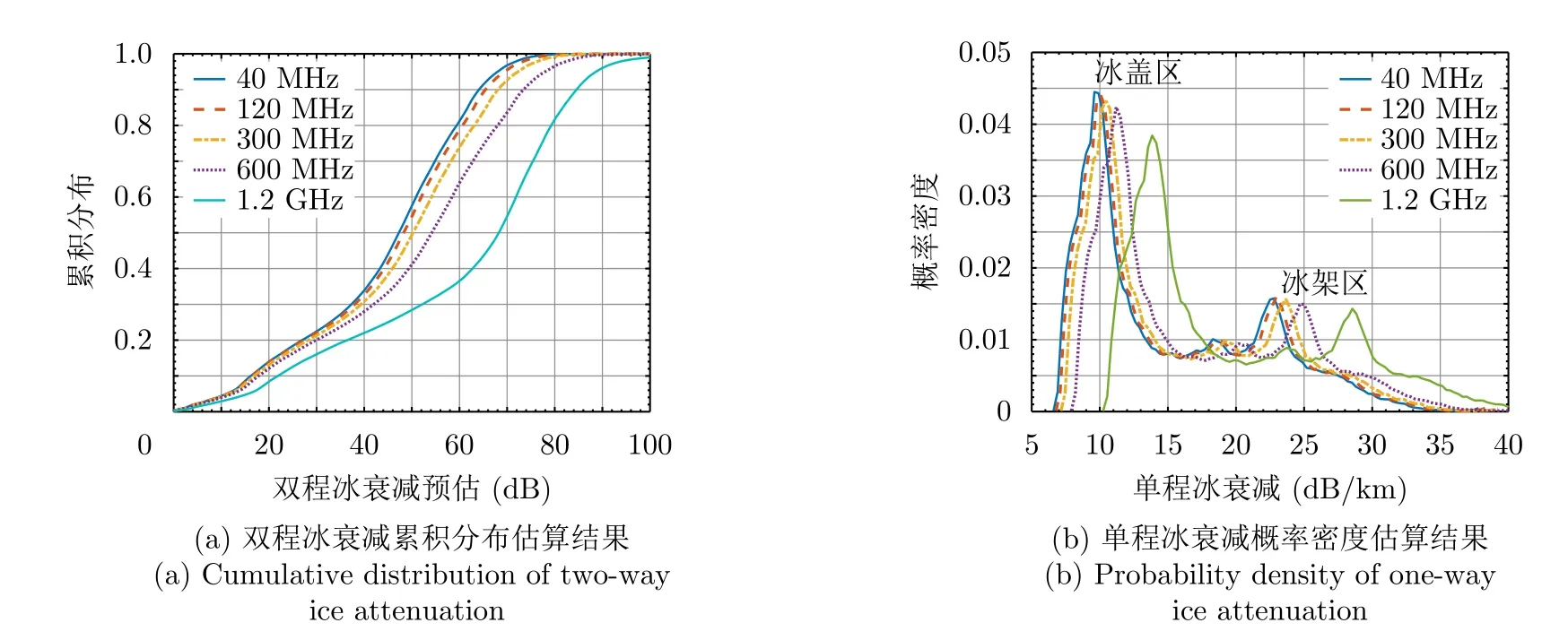
图8 不同频率下南极冰盖冰衰减估算结果Fig.8 Ice attenuation estimations of the Antarctic ice sheet with different frequencies
3.2 积雪杂波干扰
由于雷达是等时分辨系统,因此在对冰体进行三维立体探测时,在同一等时线上的表面积雪杂波会掩盖冰内部微弱的回波(如图9)。
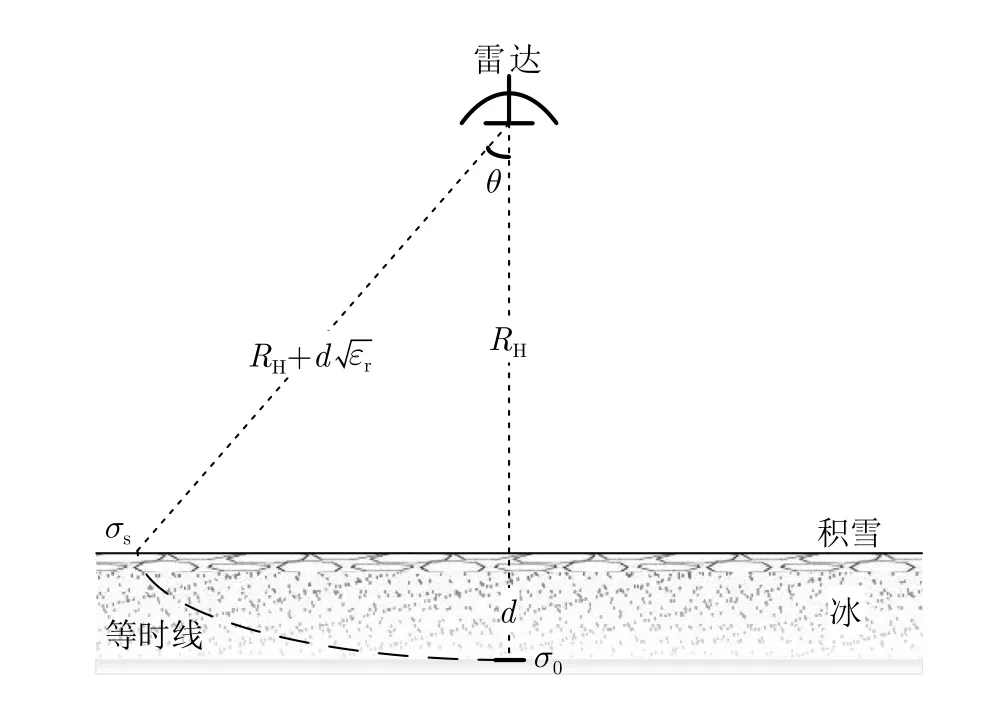
图9 穿冰雷达积雪杂波干扰示意图Fig.9 Schematic diagram of snow clutter jamming for ice sounding radar
考虑到电磁波进入冰后传播速度减慢,在冰下深度d处的等时线为

其中,RH为雷达距冰面飞行高度,c 为光速,冰的相对介电常数εr可近似为经验值3.17。换算成入射角为

当雷达飞行高度为数百米时,在|θ|≤60°范围内(针对带反射器的半波长偶极子天线),积雪杂波仅干扰到数百米深的冰层探测(如图10红黄色区域所示)。
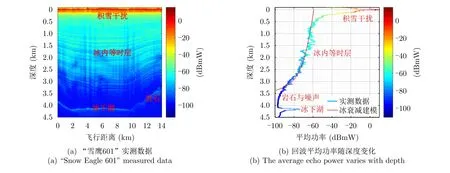
图10 “雪鹰601”穿冰雷达积雪杂波干扰示意图Fig.10 Snow clutter interference of “snow Eagle 601” ice sounding radar
利用式(13)可以通过实测数据中的浅层回波功率,计算不同入射角条件下积雪杂波的强度变化[55](如图11,截取明显高于冰内等时层回波部分)。可以看出,积雪杂波干扰强度随着入射角的增大迅速下降。利用乌拉比积雪散射模型[56],结合“雪鹰601”实测数据待定相关参数,推导得到积雪杂波强度空间分布特性
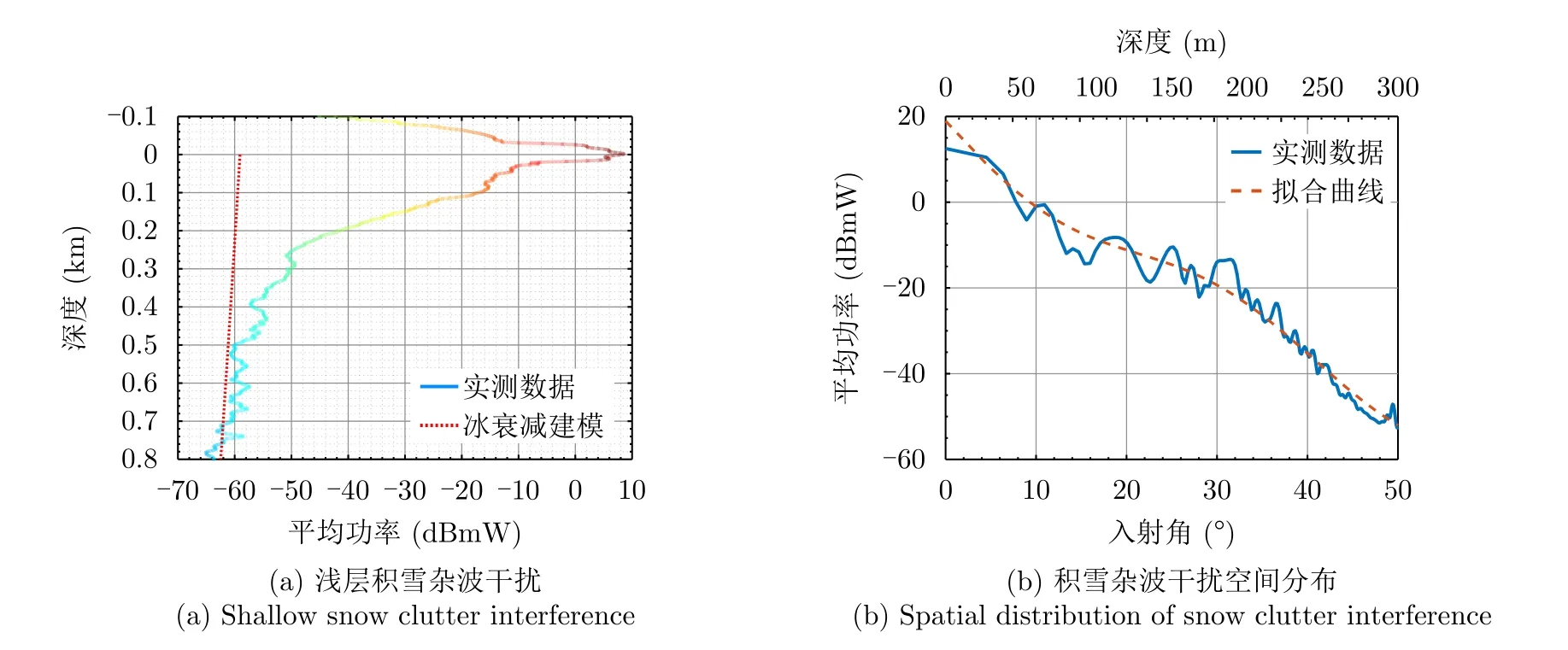
图11 VHF频段积雪杂波强度空间分布特性(基于“雪鹰601”实测数据)Fig.11 Spatial distribution characteristics of snow clutter intensity based on “snow Eagle 601” data
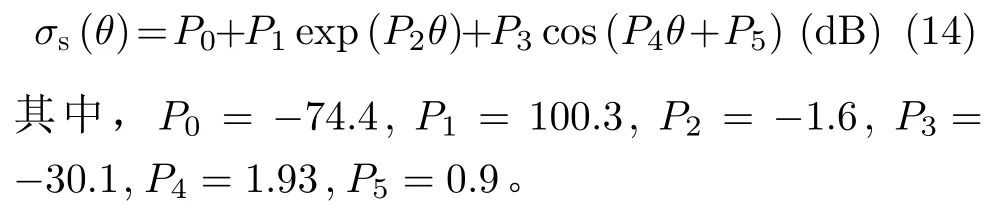
结合冰衰减特点,可以得到空间杂波抑制目标函数

其中,σ0为探测冰内/冰下目标的反射系数,σs(θ)为入射角θ条件下的积雪杂波强度,Lice[d(θ)]为深度d处对应的冰衰减,根据前面的推导近似认为冰衰减与冰厚呈线性关系,比例系数为20 dB/km,d(θ)为入射角θ条件下等时线对应的探测深度。
对于数百公里飞行高度的天基系统,积雪杂波将会完整覆盖整个冰层回波,必须考虑抑制。假设卫星飞行在距地表480 km的轨道上,并假定探测目标为冰下湖σ0≈-3.5 dB,检测门限设定为3 dB,可以得到如图12所示的空间杂波能量抑制需求情况。从图中可见,除中心的探测目标区域之外,杂波抑制需求急速提高,在约4 km深的冰层处(对应空间角约为9°),空间能量抑制需求达到—75 dB,这就对天线方向图赋形能力提出了更高需求。
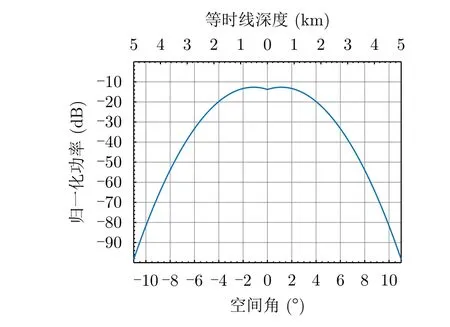
图12 天基条件下杂波抑制需求曲线Fig.12 Clutter suppression demand for spaceborne radar
3.3 垂直航迹向分辨率下降
传统穿冰雷达采用正下视探测模式对冰层进行层析观测(如图1),在垂直方向采用脉冲压缩技术实现高分辨率冰层探测;在航迹向(即沿飞行方向)采用合成孔径技术实现高分辨率;在垂直航迹向上则常利用第一菲涅尔积分区(The first fresnel zone)宽度作为分辨率指标,系统通过平台在区域多航迹飞行实现三维观测的目的。
第一菲涅尔积分区分辨率的概念源自通信领域:假设无线电波收发路径上的干扰具有相同散射特性时,由于不同空间位置散射信号到达相位的正负差异,空间回波正负抵消,从而实现高于波束分辨率(半功率宽度)的分辨率能力。在穿冰雷达系统中,第一菲涅尔积分区分辨率为[57]

其中,λ为载频波长。
当垂直航迹向波束宽度较窄或遇到非匀质散射体时,垂直航迹向的分辨率则回归到传统的波束分辨率[58]

其中,Lc为天线电尺寸。
由于穿冰雷达采用较低频率的电磁波以保证穿透能力,同时平台搭载能力有限,往往无法携带庞大的天线系统实现较高的波束分辨率,因此常使用第一菲涅尔积分区分辨率来衡量垂直航迹向分辨率。以“雪鹰601”为例,当飞行高度为600 m时,垂直航迹向分辨率仅为80~180 m(随着探测深度增加而增大)。然而,在天基平台下,若卫星飞行高度为480 km,则该分辨率恶化为公里级别,难以满足科学观测要求。
因此,必须考虑利用更窄的波束替代第一菲涅尔积分区分辨率,以满足百米量级分辨率的科学观测需求。通过波束分辨率计算可知,当分辨率优于100 m时,需要一个电尺寸数公里的天线,这对于单星系统来说无疑是个难题。
综上所述,如表5所示:天基平台系统与机载平台系统相比,由于飞行高度的大幅提升,3个关键参数的性能恶化是非常明显的,且难以通过简单的系统修改所补偿。
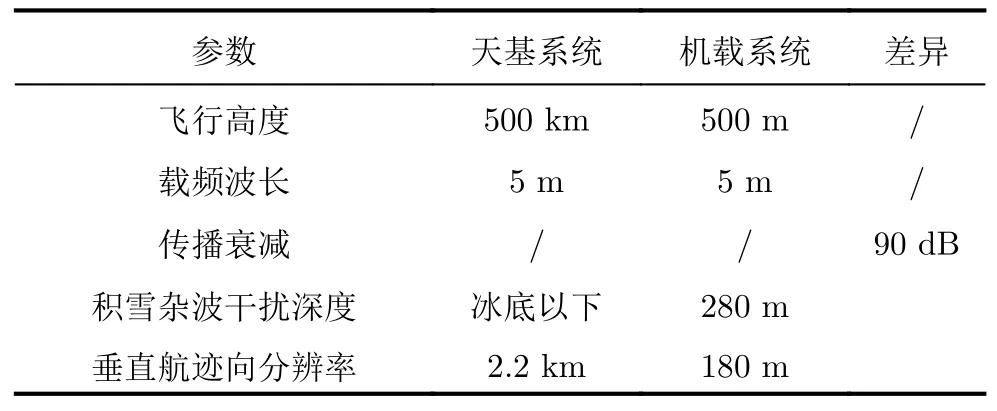
表5 天基与机载穿冰雷达相关参数对比Tab.5 The paramenters of spaceborne and airborne ice sounding radars
4 分布式穿冰雷达系统
由上文分析可知,天基穿冰系统需要更低的载频、更高的增益、更低的方向图副瓣以及更大的天线电尺寸,这对天基系统设计提出了巨大的挑战。随着卫星集成化、小型化发展,利用大规模微小卫星群协同工作实现独立大型卫星难以达到的指标能力,已经成为未来天基遥感的一大发展趋势。基于微小卫星的分布式系统主要有以下几方面的优势:(1)多发多收系统可以有效地提高总发射功率,从而提高系统增益。(2)分布式系统可以更加灵活地组成数字阵列天线,有效抑制积雪杂波干扰;(3)利用分布式系统组成大尺寸基线,扩展有效天线电尺寸,从而实现空间高分辨能力。这一系列的优势使得基于分布式遥感探测系统实现天基穿冰探测成为可能。近年来,数个国际相关组织陆续开展了该方向的研究。
4.1 分布式系统概念
在总结了OASIS的研发经验后,JPL后续提出了分布式阵列波束合成探冰雷达系统(Distributed Element Beamformer Radar for Ice and Subsurface Sounding,DEBRIS)[59]。系统延续了OASIS的45 MHz载频观测分析结果,进而利用11颗分布式12 U立方星系统编队飞行,形成环形飞行阵列,每条基线上都有3颗卫星,利用大基线合成波束提高空间分辨率;单星携带3.3 m×3.3 m的柔性天线,可压缩到4 U的立方空间中(如图13)。多发多收(Multiple-Input Multiple-Output,MIMO)系统有效提高了空间分辨率,同时抑制了积雪杂波干扰。
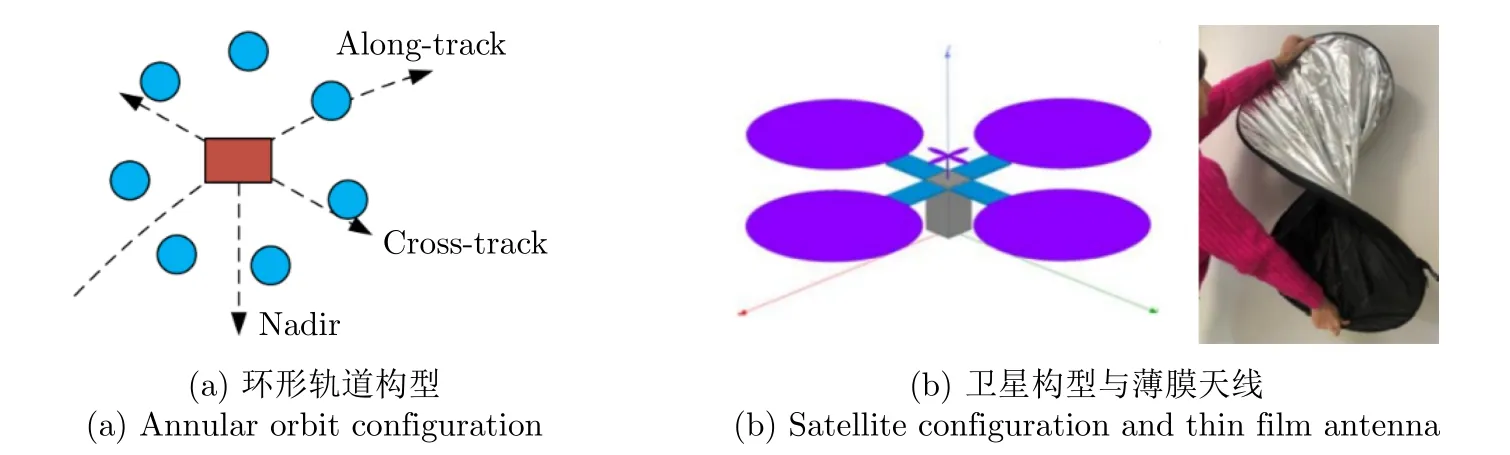
图13 DEBRIS系统示意图[59]Fig.13 DEBRIS system schematic[59]
同时,意大利Trento大学的Bruzzone团队[58,60]也在谋划将火星探测系统移植到对地观测中,与DEBRIS同步提出了地球次地表探测雷达系统(SaTellite Radar sounder for eArTh sUb-surface Sensing,STRATUS)。该系统以OASIS为母型,使用一发多收(Single-Input Multiple-Output,SIMO)模式缓解收发同步问题,并采用了“一”字型阵列编队,仅在南北极地区形成大基线,有效减少了星群数量(如图14)。与DEBRIS类似地,该系统依然存在严重的电离层误差影响和水平分辨率较差等问题。

图14 STRATUS系统Fig.14 STRATUS system
为了解决低频系统电离层影响大、水平分辨率差的问题,Alabama大学联合NASA等多家科研单位,提出了多立方星紧密编队的CubeSat Train方案[61,62],实现200 m空间分辨率。为了抑制栅瓣影响,单星上使用了15 m长的复杂十字形多通道天线(图15),这无疑加重了系统的负担;大规模星间收发同步及码分多址技术也使得系统实现难度较大。

图15 CubeSat Train系统[61]Fig.15 CubeSat Train system[61]
综合以上3个天基分布式穿冰探测计划,其详细系统性能如表6所示。可以看出:(1)3种系统都选择了VHF波段作为载频,用以增大穿冰探测能力;(2)受制于较低载频,需要使用较为复杂的天线系统;(3)系统预期的空间分辨率依然无法满足科学应用需求;(4)多发多收系统的同步方案,尚未详细考虑;(5)阵列合成后的波束栅瓣干扰尚无法彻底解决。
4.2 关键性能指标测算
4.2.1 系统灵敏度
依据式(2)推导的信噪比结果,考虑到探测目标反射系数和冰衰减均具有不确定性,本文中将穿冰雷达系统灵敏度定义为

相较于单星系统,多发多收系统有

其中,N为星群数量,Pavg_0,Gt_0和Gr_0分别为单星平均功率、天线发射和接收增益。可见,低载频和分布式对系统增益的提升是非常明显的;即便在一发多收系统下,也可获得N倍的增益提升。
4.2.2 分布式垂直航迹向分辨率
使用空间角响应来衡量垂直航迹向分辨率

其中,φi和φe分别为入射波束和出射波束的扫描宽度。
如图16所示,在垂直航迹向上星群形成的垂直航迹向基线长度为B⊥时,若系统为一发多收则有ρc≈λ/φe=λRH/B⊥,若为多发多收则有ρc≈λ/(2φe)=λRH/(2B⊥)。由此可见,更大的波长需要匹配更长的基线,才能保证垂直航迹向分辨率不恶化。
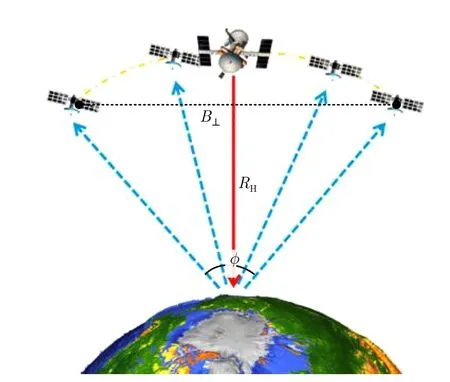
图16 空间收发角度示意图Fig.16 Spatial transmitting and receiving angles diagram
4.2.3 垂直航迹向波束合成栅瓣与卫星数量
由阵列理论可知:当阵元间隔小于半波长条件时,波束合成后不会产生栅瓣干扰。实际上,卫星间很难保证在数米间隔条件下安全飞行,因此合成波束栅瓣必定存在,其产生的强积雪杂波依然会干扰主瓣成像区域。
假设垂直航迹向卫星数量为N,则星间基线间隔为

由阵列理论[63]可知,第n个栅瓣会出现在空间角为θg的位置

为了使得栅瓣等时线不会出现在5 km深的冰层内,依据式(13)可知第一栅瓣出现在12°以外(对应400 km高度)。因此,当载频为144 MHz时最小基线间隔应小于10 m,而采用45 MHz时最小间隔增大到32 m。可见,更低的载频对栅瓣抑制也是有益的。
对于星群规模,可以得到

如图17所示,在400 km轨道高度下,20 km垂直航迹向分辨率需要约3颗卫星,7.5 km分辨率则需要约5颗卫星,这与前面所述的分布式系统方案相符;而在小于1 km的分辨率需求下卫星数量急剧上升,可利用不同的收发星组合成虚拟阵元弥补实际卫星数量的不足,但这会大幅增加系统复杂度。

图17 垂直航迹向分辨率与卫星数量Fig.17 Cross-track direction resolution with the number of satellites
4.3 关键技术研究展望
为了实现分布式天基穿冰探测,笔者认为后续需要在以下几个方面开展重点研究。
4.3.1 高增益系统
远高于传统天基微波遥感系统的增益是实现穿冰探测基本条件之一。
依据式(19),当轨道高度为400 km、空间分辨率为100 m、探测目标为冰下水系(σ0=-3.5 dB[64])、冰衰减预期为70 dB时,即使采用45 MHz的载频,依然需要系统具备提供PavgGtGr>75 dBW以上增益的能力。考虑采用50颗卫星组成多发多收系统,单星依然需要能够提供约24 dBW的增益。这对于仅能携带偶极子天线且功耗有限的立方星平台来说,依然具有相当大的挑战。如何在单星成本、星群数量和探测能力上做出平衡,需要进行更进一步的探讨和研究。
另一种解决方案是将高增益需求集中于一颗主星上,通过高功率和大尺寸天线满足探测需求,而其他辅星仅需提供多角度回波信息实现高空间分辨率,该方案能够缓解辅星群的设计压力。本文作者在文献[65]中提出了这种系统概念并对其进行了详细分析:40 m直径的大型可展开天线,能够在300 MHz载频条件下提供约80 dBi的收发增益,配合数千瓦的发射机,可以实现80 dB冰衰减条件下的冰下水系探测;此外,大型天线的使用更便于进行空间波束赋形,有利于对积雪杂波干扰进行抑制。
现有的遥感雷达卫星已经可以携带直径超过12 m的拉索式网状反射面天线[66—68],而在地球同步轨道通信卫星上抛物面天线的尺寸也早已逼近了20 m大关[69]。随着天线直径的增加,对天线的收纳、展开和形状保持能力的要求大幅提高,导致重量和成本的不断跃升。为了实现大尺寸、高增益、低副瓣的低频天线,需要采用新方法、新技术、新材料。近年来,薄膜反射阵列天线的出现,使得该需求变为可能。该种天线出色的折展比、超轻的重量、独特的平面展开特性和灵活的赋形能力,受到了多个行业的关注。从目前可获取的信息来看,美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)和NASA等多个组织,正在对其开展相关研究和在轨实验工作。
在大功率发射机方面:新型氮化镓材料的引入,使得发射机效率从30%提升至55%左右,发射机体积和损耗也有相当程度的缩减,大型太阳能帆板和更高效的锂电池组也已经能够满足数千瓦发射功率的需求。
4.3.2 星间收发同步
大规模星群系统工作并能够进行相干处理的前提是保证收发信号之间的相位同步,而相位同步的误差主要来自不同振源的频相差异。
现有的干涉SAR系统(例如:Tandem-X[70],LuTan-1[71]等)多数是双星伴飞系统,星间通过特殊链路进行准实时收发同步校准。对于大规模多发多收星群来说,两两星间均需要建立独立的同步链路,难度较大。新一代多基雷达可以使用原子钟等高精度振源解决同步问题[72—74],利用统一广播源进行整体标定后,可以稳定地工作较长时间[75,76]。
另外一种简单高效的同步方案是使用透明转发技术:回波信号被辅星接收后,直接模拟上调频至某一高频频段后转发回主星进行下调频和采样,通过频分复用技术区别不同辅星的回波信号。由于收发过程均在同一振源驱动下进行,因此频相误差可以得到保证。德国宇航中心(DLR)在其新一代高分宽幅系统HRWS中明确使用了该种方案,实现一发四收的子星MirroSAR[77]。由于穿冰雷达发射信号带宽仅为数十兆赫兹,即便采用了数十颗辅星进行编队,其转发信号的总带宽也可以控制在1 GHz左右,现有雷达模数转换器也已经可以满足采样要求。
4.3.3 立方星雷达平台
穿冰雷达系统需要构建数十颗卫星协同工作的星群,因此需要单星成本足够低、体积足够小,才能保证系统能够实现。
现有能够独立工作的立方星雷达已经能够压缩至6 U以下(例如JPL的RainCube卫星[78]),并正朝着更小的体积发展。如今,各国航天组织正在积极发展折展比更高的天线、更便宜轻小的离子推进系统,以及更加高效的能量支持系统。未来,可以通过一箭多星或者利用弹射框架等方法一次性将星群发射入轨。
此外,发展非等间隔稀疏阵列技术,利于抑制波束合成后的栅瓣能量,对于减少星群规模也有着相当重要的意义。这同样需要小型卫星平台高精度姿轨测控能力的支持。
5 总结与展望
冰川、冰盖的特殊热交换属性和庞大的含水量,使其成为全球气候变化中最为重要的环节。对数米至数公里厚的冰层动态变化立体监测是极地科学研究的重点和难点。
穿冰雷达是迄今为止对冰盖开展立体观测的最有效手段。受制于极地恶劣环境影响,现有穿冰雷达数据积累有限、更新速率较慢,远无法满足科学研究需求。利用天基平台搭载低频穿冰雷达,对极地数公里厚的冰层开展层析观测,充分发挥天基微波遥感全天时、全天候、高重访观测优势,是突破极地遥感瓶颈的关键所在。
受制于传输衰减、积雪杂波干扰、电离层干扰等因素的影响,天基高分辨率穿冰探测尚处于方案探索阶段。近年来,欧美数个科研机构开始探索采用分布式系统突破高分低频遥感系统所面临的诸多难题。本论文的参与单位也同步开展了相关工作,并提出了自主的观测方案[65]:通过一发多收模式配合立方星编队,以期实现100 m×100 m(航迹向×垂直航迹向)空间网格,5 m穿深测量分辨率,以及15 km幅宽和季节尺度的重访,满足极地科学普查需求。
得益于遥感卫星小型化、集成化的高速发展,大规模星群协同观测已经逐步成为可能。天基穿冰雷达系统中所涉及的低频载荷、星群协同工作、轻量化高增益天线、小型卫星平台等多个关键技术也将牵引微波遥感领域的发展。天基穿冰雷达系统的发展,将使微波遥感能力从“面”延伸到“体”,拓展探测维度,弥补国际上天基遥感领域的空白。致谢 本论文作者感谢“中国空间技术研究院-中山大学 全球变化天基观测系统联合研究中心”陈泓研究员(中国空间技术研究院)和程晓教授(中山大学),以及研究过程中为我们提供支持的各位专家、老师。
