“天问一号”着陆区遥感形貌建模与制图分析
2022-06-30柳思聪童小华刘世杰刘大永刘祥磊
柳思聪,童小华,刘世杰,谢 欢,赵 慧,刘大永,许 雄,叶 真,王 超,刘祥磊
(1.上海市航天测绘遥感与空间探测重点实验室,上海 200092;2.同济大学 测绘与地理信息学院,上海 200092;3.教育部深空探测联合研究中心 同济大学分中心,上海 200092;4.北京建筑大学 测绘与城市空间信息学院,北京 102616)
引 言
火星探测任务可为分析火星地质构造及演化历史[1]、构建火星高精度数字高程模型[2]、开展火星表面形貌分类[3]及水冰探测[4]等科学研究提供重要的数据支撑,还能将地外行星起源与演化相关的研究成果应用于研究地球演化过程,促进人类对宇宙和生命起源的探索,推动人类文明的不断进步。
2020年7月23日,中国“天问一号”火星探测器在海南文昌发射场成功发射,其主要由环绕器和着陆巡视器两部分构成,任务目标可以概括为“环绕”“着陆”和“漫游”3个部分[5],即通过一次发射实现火星全球环绕探测及特定区域的表面巡视探测。2021年2月10日,探测器顺利进入环绕火星轨道并于2021年5月15日成功着陆于火星乌托邦平原(Utopia Planitia)南部预选着陆区,标志着中国自主火星探测任务取得圆满成功,使得中国成为继美国之后第二个在火星开展表面巡视探测的国家,也是中国航天事业发展中又一极具重大意义的里程碑。截至2021年12月31日,“天问一号”环绕器在轨运行526天,距离地球约3.5亿km;“祝融号”火星车在火星表面工作225个火星日,累计行驶超过1 400 m。后续将继续向乌托邦平原南部的古海陆交界地带行驶,实施拓展科学探测任务。
基于轨道器和巡视器所携带的多源遥感载荷,“天问一号”将对火星表面及次表层开展如下科学研究:①探测火星形貌特征与研究地质构造演化;②探测火星表面土壤特性及分析水冰分布情况;③研究火星表面物质组成及探查矿物组成;④分析火星大气电离层及表面气候与环境特征;⑤探测火星磁场特性与分析内部质量分布[6]。其中,利用轨道器高分辨率遥感影像制作高精度地形和高分辨率形貌分类产品,是着陆安全和巡视器路径规划及行走的重要参考,可为火星形貌特征识别与地质演化分析提供重要的基础数据支撑和科学研究证据,同时也是后续火星表面矿物、水冰、磁场等科学探索的基石。
本文面向这一重大需求,以中国首次火星探测“天问一号”着陆区域为例,构建了面向火星表面形貌精细建模与自动分类技术,利用摄影测量法和明暗恢复形状法(Shape From Shading,SFS)制作了着陆区高分辨率地形,提出用深度神经网络分类方法实现着陆区精细形貌制图,并据此对比分析了着陆区附近的形貌特点及其在工程安全、科学探测上的重要性。
1 国内外研究现状
1.1 “天问一号”着陆区研究现状
研究人员综合利用多源数据对“天问一号”着陆区开展了相关先期研究,为探测任务进行了前、中、后期的准备。文献[7]使用轨道器、下降和漫游车图像对“天问一号”着陆器进行视觉定位,最终将着陆器位置确定为(25.066°N,109.925°E);文献[8]利用多源遥感数据对“天问一号”着陆区进行研究,绘制了多种地貌特征指示乌托邦平原曾存在大量的水冰/挥发分,并归纳了着陆区的地质演化历史,为“祝融号”火星车的未来探测规划和科学数据解译提供重要的支撑;文献[9]绘制了“天问一号”潜在着陆区乌托邦平原初步区域地质图,并对该区域的着陆危险性进行了初步分析;文献[10]基于HiRISE和CTX影像,研究了乌托邦平原南部的风成特征,并推测“天问一号”着陆区发生沙尘暴的概率小于3%;文献[11]研究了“天问一号”着陆区火星表面温度的空间自相关及其与近地表环境因子的时空关系,有助于了解可能危及“天问一号”着陆器在火星表面生存和运行的复杂表面环境。
1.2 火星高精度地形制作研究现状
火星遥感制图技术中,针对轨道器影像的摄影测量几何处理方法尤为关键,包括成像几何模型的建立、影像匹配与连接点选取、光束法平差、生成数字高程模型(Digital Elevation Model,DEM)和数字正射影像图(Digital Orthophoto Map,DOM)等技术环节[12]。从方法技术上,火星遥感制图的方法可分为利用立体像对的摄影测量、使用影像与地形结合的SFS法和使用激光测高数据制作地形三大类方法。欧洲航天局(European Space Agency,ESA)“火星快车号”(Mars Express)高分辨率立体相机(High Resolution Stereo Camera,HRSC)团队使用摄影测量的方法,将HRSC影像处理后得到了标定的二级影像数据、带地图投影的三级影像数据、DEM四级地形数据和DOM四级影像数据[13];文献[14]将火星轨道器激光测高仪(Mars Orbiter Laser Altimeter,MOLA)数据加入到HRSC影像数据平差模型中,获得了水平精度4~7 m、高程精度11~15 m的地形产品;USGS团队使用ISIS和SCOCET SET软件,对HiRISE影像进行校正、投影、电荷耦合元件(Charge-Coupled Device,CCD)拼接、平差、匹配与DEM生成等系列处理后,生成了精度较高的地形产品[15];文献[16]用HRSC数据制作的地形产品选取出地面控制点,加入HiRISE非严密成像模型中联合处理,得到了高分辨率DEM产品;文献[17]以MOLA数据生成的DEM为基准,配准了HRSC、CTX、HiRISE 3种数据生成的DEM产品。国内的解放军信息工程大学、香港理工大学、中国科学院遥感与数字地球研究所等团队也对火星遥感制图技术开展了众多研究,取得了系列制图成果。目前,仍存在一些问题需要针对性地进行研究,如针对大范围的区域制图时摄影测量方法与SFS方法的效率问题,以及在高分辨率影像覆盖较少的区域如何融合多源数据制作高分辨率的地形产品等。
1.3 火星表面形貌分类研究现状
国内外学者基于火星轨道器影像及其生成的DEM/DOM地形数据,对火星形貌分类开展了相关研究。文献[18]利用数字地面模型(Digital Terrain Model,DTM)数据,通过非监督方法对提取的组合特征向量进行聚类,将火星新梅里亚高地(Terra Cimmeria)区域的形貌分成高地、陨石坑、低地、高起伏区域和管道5种类别;文献[19]根据MOLA DEM上纹理、凸凹度和坡度3种特征属性,采用无监督聚类方法将火星萨希斯(Tharsis)区域地形分成9大类;文献[20]在多源轨道器数据(如HRSC、MOLA)上提取多种具有区分性的特征,利用贝叶斯分类器和boosting分类器,将地形特征划分为平原、低地、斜坡、火山4类,将风蚀地区划分成常规风蚀、吹蚀两类,将地质特征划分成平原、撞击物质、撞击坑底部、斜坡、峡谷、山脉六大类;文献[21]和文献[22]采用深度全卷积语义分割网络Deeplab,对“火星2020”(Mars 2020)任务8个候选着陆区,利用HiRISE影像将其形貌类别分成17大类,为候选着陆区可通行性分析做了前期准备。由于火星表面形貌类型复杂,对其形貌进行精细遥感分类制图是着陆器安全选址和巡视器长距离行走的关键。如巡视器路径规划中需要考虑不同形貌区域的可通行性,坡度变化明显的撞击坑、密集分布的大块岩石区几乎很难通行,深沙区域容易导致车轮的打滑、下沉,有棱角的岩石会对车轮有磨损等。
2 研究区和数据集
2.1 研究区简介
“天问一号”火星探测器的着陆区位于火星乌托邦平原南部预选着陆区[23]。乌托邦平原是火星北部低地最大的公认撞击盆地,直径约3 200 km,是一片广袤的熔岩平原,分布有陨石坑、风成山脊和一些巨石。该区域也是“海盗2号”(Viking 2)在火星上的着陆与探索区域[24]。乌托邦平原的低海拔、清晰地形和潜在地下水冰的存在,使其成为火星探测任务的着陆候选区和高价值科学探测区域。
2.2 HiRISE数据
HiRISE是NASA“火星勘测轨道飞行器”(Mars Reconnaissance Orbiter,MRO)上搭载的科学成像仪器,是一种推扫式成像传感器,具有14个CCD(10个红波段、2个蓝绿波段和2个近红外波段)。每个CCD由跨轨道方向的2 048个像素和沿轨道方向的128个像素组成,其中10个红色光谱(700 nm)的CCD位于中间[25]。HiRISE可提供高达0.25 m/像素的超高分辨率影像[26]。自2006年以来,HiRISE已获取超过48 000幅图像,已被广泛用于研究火星撞击坑、火山学、构造作用、河流等,并提供前所未有的高清火星表面形貌细节[27]。HiRISE相关参数如表1所示。
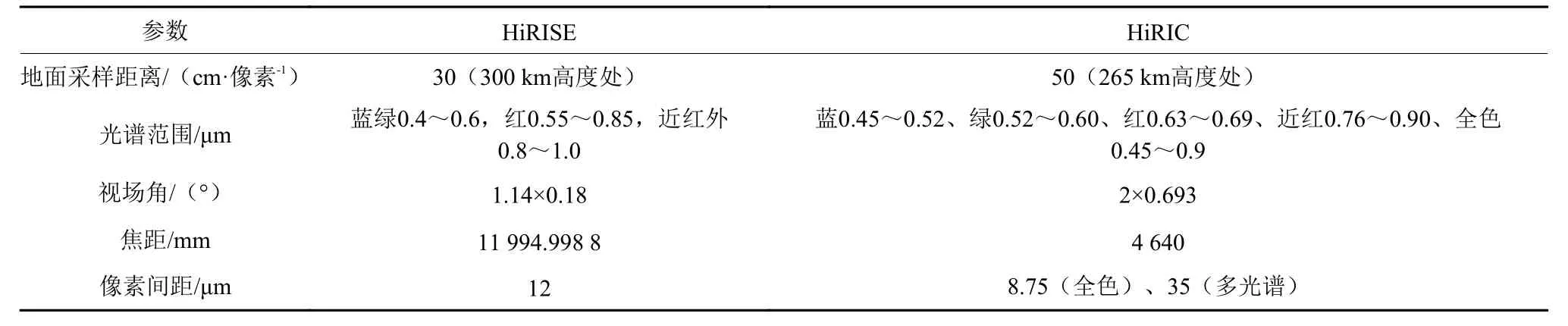
表1 HiRISE和HiRIC相关参数Table 1 Related parameters of HiRISE and HiRIC instruments
2.3 HiRIC数据
高分辨率相机(High Resolution Imaging Camera,HiRIC)是中国“天问一号”火星探测器上搭载的主要载荷之一。HiRIC焦面探测器包含2个线阵TDI CCD探测器和2个面阵CMOS(Complementary Metal Oxide Semiconductors)探测器,分别实现推扫成像和面阵或视频成像。其主要用于获取火星表面轨道高度在265~800 km且太阳高度角不小于10°时感兴趣区域的高清光学图像[28]。TDI CCD可以获取全色图像和多光谱图像。全色波段CCD推扫成像是HiRIC默认在轨探测模式。全色分辨率在高度265 km处可达0.5 m,幅宽9 km,以支持对火星形貌、地质结构及地质演化的研究[23,29-30]。HiRIC相关参数如表1所示。
3 形貌建模与制图分析方法
3.1 高分辨率三维地形建模方法
针对高分辨率HiRISE影像数据,首先进行多个CCD的拼接、校正、添加星历信息等预处理,然后利用光束法平差修正影像数据的外方位元素。进行密集匹配后得到初始视差图,然后对初始视差图进行亚像素的细化,通过前方交会生成点云数据,内插得到初始的DEM。
利用初始DEM和HiRISE单幅影像数据,结合光照参数、相机参数等,建立影像的反照模型、估算光源方向,根据反照模型进行渲染与影像进行比较,列出成本函数并对DEM进行数值迭代,最终得到细化后的高分辨率地形结果。通过分别引入亮度约束、平滑度约束和初始地形约束作为正则化约束,构建基于SFS的成本函数(共k副影像),通过最小化成本函数(式1),优化表面地形h(x,y)
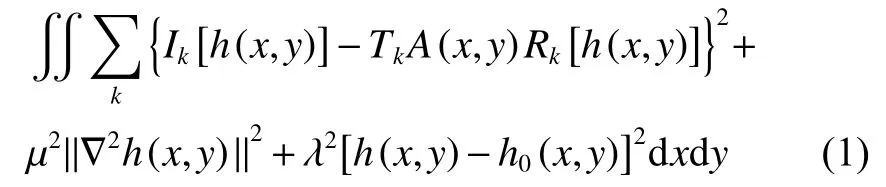
SFS得到的DEM结果与HiRISE影像具有同级别分辨率。本文构建的高分辨率三维地形建模方法流程如图1所示。
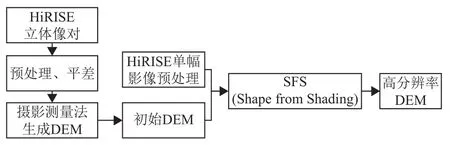
图1 所构建的高分辨率三维地形建模流程Fig.1 High-resolution DEM construction process
3.2 高分辨率形貌分类方法
HiRISE影像分辨率可达0.25 m,“天问一号”HiRIC影像分辨率为0.7 m(轨道高度约370 km)。在亚米级高分辨率影像上,能够清晰地分辨出着陆区的撞击坑、孤立沙丘、岩石、光滑及粗糙风化层等细致火星表面形貌特征。这些复杂形貌特征分布区既是火星车巡视与科学探测的感兴趣区,同时也是其行走潜在的障碍与风险所在。但大范围区域人工标记这些类别耗时费力,且标记结果受人主观因素影响较大。目前深度学习方法被广泛应用于遥感影像的分类与目标识别中,如经典的深度学习网络VGG,具有复杂和有效的特征表示能力,可直接使用原始数据进行特征提取和分类,无需使用人工设计的特征[31]。
本文制作高分辨率形貌分类方法的流程如图2所示。其中,使用类似于VGG的卷积神经网络进行火星高分辨率轨道器影像的形貌分类。所构建的卷积神经网络架构如图3所示,其中Conv[3×3]:64表示卷积核大小为3×3,特征图个数为64,BN代表批归一化层,使用的Relu激活函数,FC 1 000表示全连接层的节点数为1 000,ClassNum为样本类别数,使用SoftMax进行最终分类。首先针对每个标记的训练样本像素点,选择周围一定大小(如31×31)的Patch,输入到网络中进行训练,利用训练后的网络对全尺度影像进行分类。试验中使用Adam优化器,学习率为0.000 1,批次大小设置为128。
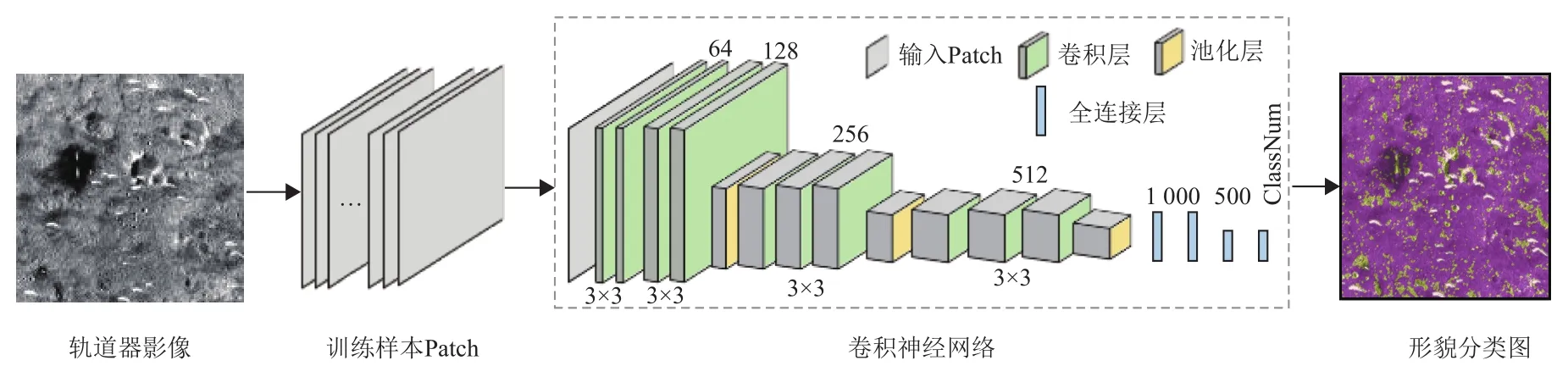
图2 构建的高分辨率形貌分类方法流程图Fig.2 The flow chart of the proposed high-resolution topography classification method
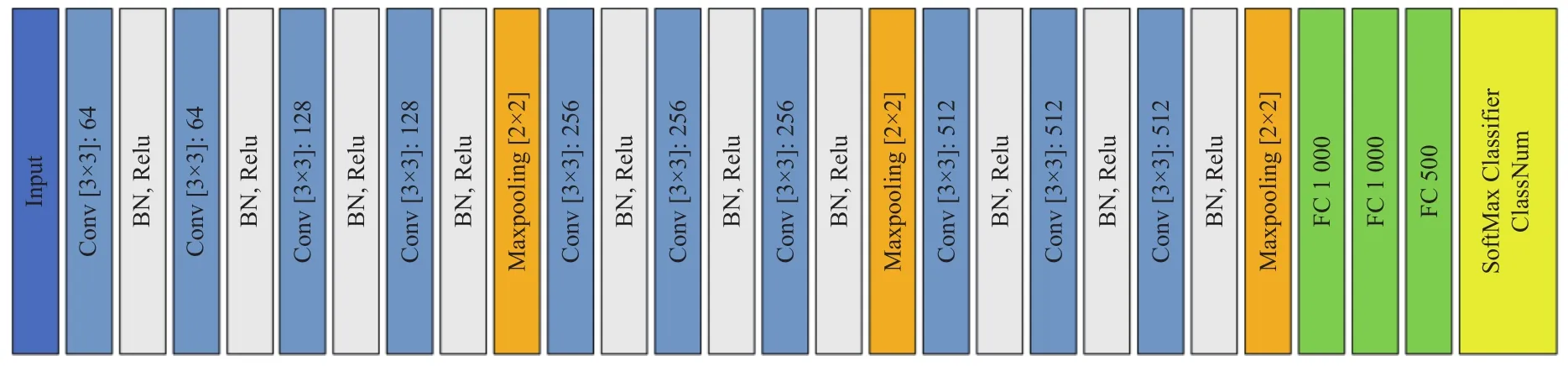
图3 所使用的卷积神经网络架构图Fig.3 Convolutional neural network architecture
4 结果与分析
4.1 高分辨率地形制图结果与分析
目前NASA HiRISE团队已发布了“天问一号”着陆点附近的1m/像素的高分辨率DEM产品,中国国家航天局也利用“天问一号”轨道器HiRIC数据制作了3.5 m/像素的着陆点附近DEM产品。本文利用HiRISE数据,采用提出的结合摄影测量与SFS的地形制图方法,自主制作了“天问一号”着陆点附近5.2 km×4.7 km范围内0.25 m/像素的高分辨率DEM,其结果如图4所示。为进一步验证所制作DEM的有效性和可用性,选取着陆区域相互间隔1 km的东西(D、E、F)和南北(A、B、C)方向上多组剖面线处高程值(如图4中红线所示)。NASA发布的NASA-HiRISE-DEM和CNSA发布的“天问一号”CNSA-HiRIC-DEM地形产品进行对比分析,结果如图5(a)~(f)所示。通过6个剖面高程对比及均值误差统计,可以看出基于本文方法制作的DEM与NASA-HiRISE-DEM在高程上差异均值为1.866 m,与CNSA-HiRIC-DEM的高程平均差异均值为1.074 m,一致性较高,可用于后续高精度地形分析与辅助决策。

图4 本文制作的“天问一号”着陆区高分辨率DEM(0.25m/像素)Fig.4 High-resolution DEM (0.25m/ Pixel) that made in this paper of Tianwen-1 landing area
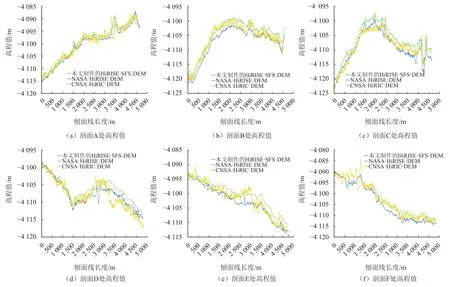
图5 本文方法制作的DEM地形数据与公开发布产品在不同剖面上高程值对比Fig.5 The elevation values comparison in different sections of DEM data produced by our method and published products
根据图4所示本文制作的DEM地形数据,对“天问一号”着陆点附近区域的坡度和粗糙度进行分析,结果如图6所示。从图6(a)生成的坡度图中可以看出,着陆点附近区域整体地形坡度在3°以下,全局上较为平坦;此外,用半径1.25m的圆逐像素计算圆内最大最小高程差值来进行粗糙度分析,从图6(b)粗糙度结果图中可以看出,着陆点附近地表的起伏程度不大于30 cm,整体地势相对平缓,符合火星探测器在该区域安全着陆和后期巡视探测的工程需求。
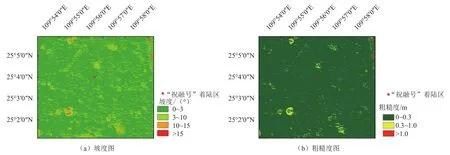
图6 本文制作的“天问一号”着陆区地形产品坡度及粗糙度图Fig.6 The slope map and roughness map of the terrain products in Tianwen-1 landing area produced in this paper
4.2 高分辨率地形分类结果与分析
本文利用“天问一号”着陆区附近的HiRISE和HiRIC轨道器高分辨率影像进行试验,影像分辨率分别为0.25 m和0.7 m,所选区域尺寸大小分别为2 979像素×5 602像素和7 448像素×6 723像素。根据研究区的形貌特征、火星车巡视探测中可能的感兴趣区以及巡视过程中的潜在障碍,本文将研究区形貌划分成光滑风化层、粗糙表面(包括粗糙风化层、石场等)和沙丘3种类别,具体示例如图7所示。轨道器高分辨率影像上形貌类别样本标记信息见表2。

表2 数据描述及训练样本个数Table 2 Data description and number of training samples
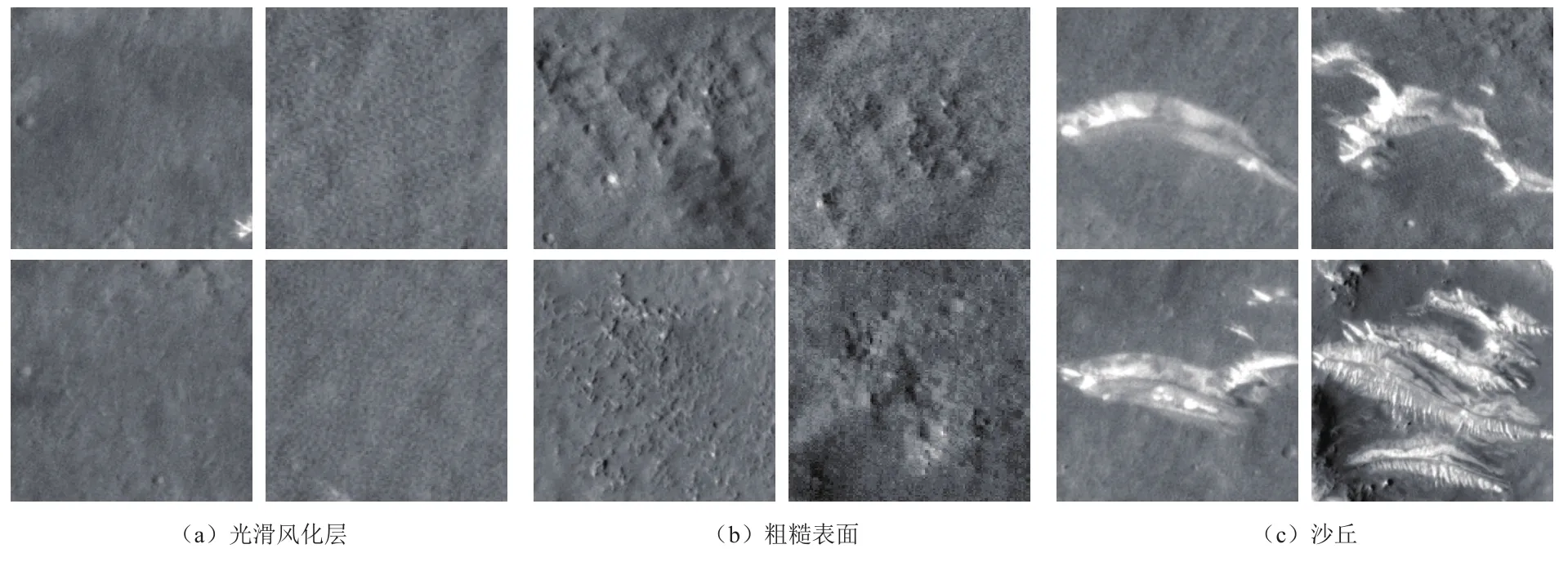
图7 “天问一号”着陆区表面形貌类别及示例Fig.7 Topography categories and examples in Mars Tianwen-1 landing zone
图8展示利用本文提出的类VGG卷积神经网络方法在两种火星轨道器数据上获得的形貌分类制图结果,并将其局部结果进行放大以进一步对比和评估。可以看出,着陆点附近的形貌类别分布主要由光滑风化层、孤立的沙丘和由石场、粗糙风化层等粗糙表面所构成。其中,光滑风化层为主要形貌类别;沙丘、成片存在的岩石区、孤立裸露岩石和小型撞击坑等影响着陆和巡视安全的潜在障碍目标类别,在研究区零散分布,也都能被构建的深度分类方法很好地自动识别出。
图9(a)展示了中国“祝融号”火星车巡视路线和巡视区域[32],并将其与本文在HiRISE、HiRIC轨道器数据上的形貌分类结果叠加显示,结果如图9(b)、(c)所示。可以看到,由于影像分辨率的优势,HiRISE影像(0.25 m)能够更好地区分一些形貌细节特征,如小型岩石块和小型撞击坑等,对于精细化的形貌分析是国产HiRIC数据的有力补充。但因其分辨率过高,也会不可避免地引入孤立点的噪声,在一定程度上会影响制图的精度和效果。在HiRIC影像(0.7 m)上,中等尺度的形貌特征更加显著,而火表目标的形态及轮廓更为清晰(如孤立沙丘等)。“祝融号”火星车在实际巡视探测行走过程中,基本避开了障碍目标区域,如沙丘、岩石、小型撞击坑等(见图9),实现了截至2021年12月31日超过225个火星日的安全巡视探测任务。通过对着陆巡视区域形貌特征及其分布的细致分析,可以为火星车的持续安全行走提供重要参考信息,如可以优先选择光滑风化层区域,绕过或者避开零散分布的小型撞击坑、陡坡和岩石区域等。同时,也可以为下阶段寻找感兴趣的科学探测潜在目标区域提供重要的参考数据。
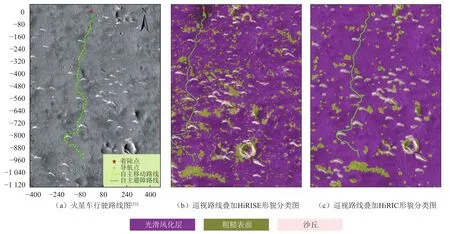
图9 “祝融号”火星车巡视路线与HiRISE、HiRIC形貌分类结果叠加对比图Fig.9 Zhurong rover patrol route and its overlapping with HiRISE and HiRIC topography classification results
5 结 论
本文利用国内外火星轨道器多源高分辨率遥感影像,研究构建了火星表面形貌精细建模与自动分类方法。使用摄影测量和SFS法制作了“天问一号”着陆区的高分辨率三维地形,并构建基于深度学习的形貌分类方法对着陆区形貌类别及分布进行了制图分析。本文制作的高精度地形数据在6个剖面上与NASA和CNSA官方发布的DEM产品均具有较高一致性,高程差异均值分为1.866 m和1.074 m。通过制作的地形数据和形貌分类结果分析可得,着陆点附近坡度在3°以下,着陆点附近地表的起伏程度不大于30 cm,可以得出“天问一号”着陆区整体地势平缓,形貌类别较单一,符合探测器安全着陆和安全巡视的工程需求。但火星车在实际巡视探测过程中仍需绕行或者避开如沙丘、岩石、小型撞击坑等诸多障碍。后续“祝融号”巡视器科学探测可结合高分辨率地形及形貌分类结果进行综合考量。
致 谢
本文中“天问一号”轨道器高分辨率相机HiRIC数据和CNSA-HiRIC-DEM地形产品由中国月球与深空探测工程地面应用系统处理制作,由中国国家航天局提供(http://moon.bao.ac.cn);HiRISE高分辨率轨道器影像和NASA-HiRISE-DEM均下载自https://www.uahirise.org/。
