玉米精量播种机单体仿形机构的仿真与设计
2022-06-30陈继国衣淑娟刘凌峻李怡凯
陈继国,衣淑娟,刘凌峻,李怡凯
(黑龙江八一农垦大学工程学院,大庆 163319)
近年来,免耕播种技术在国内外得到快速发展[1-4],学者们主要集中在玉米、小麦和花生等播种机的研究工作上[5-8]。对于玉米精量播种机而言,四杆仿形机构是影响玉米播种机播种作业质量关键因素之一。作业过程中,特别是免耕播种作业中,由于播种单体相对地表上下起伏相对运动,导致排种轴与地轮之间的距离不断变化,四杆仿形机构仿形量变化较大,进而影响播种的作业质量[9]。因此,对平行四杆仿形机构参数的设计研究是保证免耕播种机作业播深一致的关键。
目前,对于玉米免耕播种机研究人员做了大量研究,主要有河北农业大学[9]设计的2BMQ-4 型玉米免耕清垄施肥精密播种机、罗红旗等[10]设计2BML-2型垄作免耕播种机、机美诺科技股份有限公司[11]设计的2BJM-4 型玉米免耕精密播种机、黑龙江八一农垦大学[12]设计的2BDMJ-6 型大垄双行免耕精量播种机以及黑龙江省农机研究院2BJM-6 型免耕精量播种机等。以2BJM-6 型免耕精量播种机为例,该机器采用悬挂式,外形尺寸为2 450 mm×5 510 mm×2 160 mm,配套动力55~88 KW,整机重量1 600 kg,6 行播种,播深30~70 mm,肥深80~100 mm,行距60~70 mm,大豆播种量54~90 kg·hm-2,玉米播种量15~45 kg·hm-2。该免耕精量播种机适合东北地区玉米茬地特别是旱区免耕播种作业,主要由机架、单圆盘施肥开沟器、仿形架、地轮、双圆盘开沟器、波纹圆盘破茬刀、镇压轮、仿形限深轮、排种器和外槽轮排肥器等机构组成,地轮整体驱动单体仿形。作业过程中,通过链轮的更换来改变种距,当其工作一次行程就可以完成精密播种所需的六道工序,可实现精密播种。上述机型均采用了平行四杆仿形机构,且均存在功耗大、作业效率不高,对土壤扰动量大的问题[12]。
为了提高播种作业质量和播深一致性,研究人员在仿形机构的控制与限深装置等方面做了大量的研究。李正义等[13]采用PLC 控制玉米精量播种,用步进电机代替地轮控制排种器,实现精量播种,提高了工作效率和播种性能,但在播深控制方面阐述较少;梁方等[14]设计了开沟深度定压电液仿形控制系统,利用MATLAB 仿真获得在20~200 N 的开沟力、10~80 mm 开沟深度下,系统的平均响应时间约在0.27~0.36 s,研究为电液仿形在土壤条件下的实际应用,特别是固定播深下仿形机构响应时间等方面提供了一定理论基础;许光彬等[15]采用UG 仿真研究了旋播一体机弹-液双位仿形机构;贺俊林等[16]对2BQYF-6A 硬茬精密播种机仿形传动进行设计,通过改变四杆仿形机构的尺寸方案获得III 型样机传动性能稳定,观察不到明显的跳动现象出现;白晓虎等[17]采用ADAMS对2BG-2 型免耕播种机仿形机构弹簧参数进行优化设计,发现安装拉力弹簧有利于开沟深度稳定,弹簧刚度系数越大,最大偏角越小,开沟深度变化就越小;马永财等[18]对比分析了基于弹簧变形的四杆仿形机构和电液自控仿形机构仿形精度,发现电液自控仿形的精度要高于基于弹簧变形的四杆仿形机构,但要考虑地表的起伏和土质软硬对仿形精度影响。
基于以上研究,目前主要的仿形机构包括基于弹簧变形的机械仿形和电液仿形机构。对于机械仿形中平行四杆仿形机构应用最为广泛,因为随着地表的起伏,弹簧会产生压缩或伸长,弹簧力对开沟器的竖直压力会产生变化,直接影响开沟深度,所以基于弹簧形变的四杆仿形机构并不能严格保证开沟深度完全一致;对于电液仿形机构来讲,一般利用的机电液一体化的技术,利用PLC、传感器等控制装置调节液压缸的位移,实现播种深度的一致性,而当播种机处于高速作业和复杂的土壤环境时,执行元件-液压缸的反馈仍会出现一定滞后的现象,也就是说在高速作业中播深控制出现滞后现象。综上所述,四杆仿形机构是保证播深一致性的设计关键,其的仿形性能可有效保证播种机作业过程中种沟具有一致性,最终保证种子具有较好的出苗率。因此,设计出合理性能参数的四杆仿形机构,对智能免耕高速精量播种机仿形控制具有直接的理论与实践指导意义。
1 玉米播种单体结构、工作原理和主要参数
1.1 播种单体结构和工作原理
玉米免耕精量播种机主要适用于干旱和半干旱地区,如中农机2BJ-470B 型,免耕精量播种机一般是由平行四杆仿形机构、种箱、肥箱、指夹式排种器、免耕破茬装置、双圆盘开沟器、覆土镇压轮和限深装置等组成,该类型播种机一次工作行程可完成播种所需的开沟、施肥、播种、覆土和镇压等工序。所设计的玉米精量播种机播种单体结构见图1 所示,主要是由平行四杆仿形机构、波纹圆盘破茬刀、播深调节装置、双圆盘开沟器、限位块、仿形限深轮和拉力弹簧等组成,该播种单体排种器采用指夹式,排肥器采用外槽轮式,传动机构采用链条传动,排种开沟器采用双圆盘式,防堵工作部件采用波纹圆盘式。

图1 玉米精量播种机播种单体结构Fig.1 Seeding monomer structure of maize precise seeder
播种单体的工作原理为作业前需设置播深,作业过程中,通过调定播深调节装置(6)的调节手柄调整限深轮与双圆盘的相对位置,来控制播深。调节手柄在调节板上共有7 个档位,从而调节限深块的位置,满足不同条件对播深的要求。当播深确定后,仿形限深轮(9)沿地表运动,配合平行四杆仿形机构(3)作用,播种单体可以自动调节上下位置,保证播种深度的稳定一致;波纹圆盘破茬刀(7)将秸秆切断,双圆盘开沟器(8)开出种沟;排种器排种导管导出种沟,然后完成覆土镇压。设计单体四杆方形机构和限位机构的配合,解决了播种单体的播深一致性问题,既能保证稳定的机械仿形,也可满足足够的机械强度要求。
1.2 主要参数
播种机一次作业可完成破茬、开沟、播种、覆土和镇压等多项作业,主要参数如表1 所示。

表1 玉米播种机主要参数Table 1 Main parameters of corn planting monomer
2 关键部件的设计与分析
2.1 四杆仿形部件的结构原理
平行四杆仿形机构保证了玉米播种机播深一致性的要求,保证播种单体开沟深浅一致,进而对种子出苗和做作生长的均匀性提供了有力条件[18]。根据仿形轮和开沟器的位置关系,四杆仿形机构可分为前位、侧位、后位三种类型仿形形式。采用侧位仿形,即将仿形轮放置在开沟器两侧,与开沟器紧密贴合,与其它两类仿形相比而言,侧位仿形精度较高,但开沟器与仿形限深轮之间会存在间隙,作业过程中也会出现堵塞现象的发生。播种单体四杆仿形机构简图见图2 所示,主要是由机架AC、上连架杆AB、下连架CD 和连杆BD 等组成。

图2 四杆仿形机构简图Fig.2 Four rod profiling mechanism diagram
由图2 可见,四杆仿形机构的上连架杆AB 和下连架杆CD 平行且相等,A 和C 点铰链在机架AC上,B 和D 点铰链在连杆BD 上,由上连架杆AB、下连架杆CD 和连杆BD 组成四杆机构绕铰链点A 和C 转动。鉴于平行四边形的运动特点,作业过程中,由于上连架杆AB 和下连架杆CD 做平行运动,因此与连杆BD 相连的双圆盘开沟器总是做上下的平行运动,保证了播种作业过程中的种子沟的深度相同,进而保证播深一致性。
2.2 四杆仿形部件的受力分析
研究表明[19-20],平行四杆仿形机构的土壤对镇压轮的支反力主要因素包括单体的配重、牵引角及开沟部件所受的阻力。同时,也发现开沟器与仿形轮与土壤相接触的底端垂直距离决定了播种单体的播深。为了保证开沟器和仿形轮在随地面轮廓上下起伏的作业过程中的稳定性,因此,对开沟器、限深轮和镇压轮的受力分析对四杆仿形机构的结构设计至关重要。在田间作业过程中,为保证播深的稳定性和仿形的流畅性,四杆仿形机构应保持受力平衡。四杆仿形机构的受力分析见图3 所示,对播种单体进行受力分析,可得其受力平衡和力矩平衡方程:

图3 四杆仿形机构受力分析图Fig.3 Stress analysis diagram of four rod profiling mechanism

式中:
FQX、FQY—分别为播种单体所受牵引力的水平分力和垂直分力;
FKX、FKY—分别为开沟器水平和垂直方向所受的阻力,FKX=fFKY,f 为土壤阻力系数;
FSX、FSY—分别为限深轮水平和垂直方向所受的阻力,FSX=μFSY,μ 为限深轮所受阻力系数;
FZX、FZY—分别为镇压轮水平和垂直方向所受的阻力,FZX=f1FZY,f1为镇压轮所受阻力系数;
M—为牵引力在xy 平面上的力矩;
rk—为开沟器的半径;
rS—为限深轮的半径;
rZ—为镇压轮的半径;
G—为播种单体的重力;
H1—为播种单体所受牵引力受力点距铰链点C在y 坐标轴上的距离;
H2—为限深轮回转中心距铰链点D 在y 坐标轴上的距离;
H3—为限深轮回转中心距铰链点D 在x 坐标轴上的距离;
H4—为开沟器回转中心距铰链点D 在y 坐标轴上的距离;
H5—为开沟器回转中心距铰链点D 在x 坐标轴上的距离;
H6—为播种单体重力作用点距铰链点D 在x 坐标轴上的距离;
H7—为镇压轮回转中心距铰链点D 在x 坐标轴上的距离;
H8—为镇压轮回转中心距铰链点D 在y 坐标轴上的距离;
α—为连架杆CD 与x 标轴所夹的角度。
由公式(1)、(2)和(3)可得,限深轮所受的阻力为:

由公式(4)可见,仿形限深轮所受的阻力与重力G、开沟器的工作阻力FXY、镇压轮的工作阻力FZY和水平角α 等有关,当播种单体的重力G 恒定不变时,随着FKY、FZY和α 的增加,仿形限深轮受到的阻力减小。相反,随着FKY、FZY和α 的减少,仿形限深轮所受的阻力值就变大。限深轮所受的阻力将直接影响仿形的精度和播深的准确。同时,要保证开沟部件在作业过程中的稳定性,覆土镇压轮与地面之间有合适的垂直阻力FZY。若垂直阻力FZY的值越大,则容易导致镇压轮的下陷量越大,致使镇压轮所受的前进阻力FZX就越大;相反,若垂直阻力FZY的值越小,则机器重力G 不足,导致开沟部件不能够稳定工作,最终导致不能保证播深的一致性。
2.3 四杆仿形部件的参数设计
平行四杆仿形机构的结构尺寸如杆长尺寸、牵引角、横向宽度、强度和刚度等,是影响四杆仿形机构仿形性能主要因素[20]。为保证开沟器稳定工作,牵引角的变化范围越小越好。仿形机构中上下连架杆要有但一定强度,且长度适合。若连架杆长度过长会导致播种机构重心后移,破坏作业工作时的稳定性。结合农艺要求和土地处理程度,来确定四杆仿形机构的杆长尺寸。通常,上下仿形量为80~120 mm,横向宽度选定为350 mm,其四杆机构尺寸参数见图4 所示。
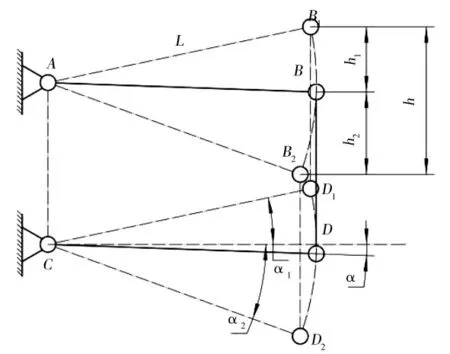
图4 上下仿形的尺寸参数Fig.4 Dimension parameters of the upper and lower profiles
上下仿形机构的总仿形量h、连架杆长度L 和上仿形量h1分别为:
式中:
h—为总仿形量,mm;
h1—为上仿形量,mm;
h2—为下仿形量,mm;
L—为四杆机构的连架杆长度,mm;
α1—为上仿形角,°;
α2—为下仿形角,°;
α—为牵引角,°。
由公式(5)可见,若上下仿形量相同时,上下连架杆越短,则牵引角变化范围越大;反之牵引角变化范围则越小。为了保证玉米精密播种单体在作业过程的稳定性,牵引角取值应小一些更为有利[20]。同时,四杆仿形机构的上下连架杆越长,则可以提高播种机具作业的稳定性。但是上下连架杆过长会导致整个播种单体尺寸过大,整机尺寸过大和重心转移,不利于播种单体作业的稳定性。因此,设计选定上仿形角为15 °,牵引角为0 °,下仿形角为20 °,则得到四杆机构中机架LAC长度为205 mm。在此基础上,假定上下仿形量相等,进一步确定四杆机构的连架杆L长度。由公式(6)可得到连架杆AB 的长度。取下仿形量h2为120 mm,下仿形角α2为20 °,算的连架LAB杆长度为350.86 mm,取LAB为350 mm。同时,将LAB为350 mm,上仿形角α1为15 °带入公式(7),可得上仿形量h1为90.58 mm,满足上下仿形量80~120 mm的使用要求。
2.4 四杆仿形机构拉力弹簧分析
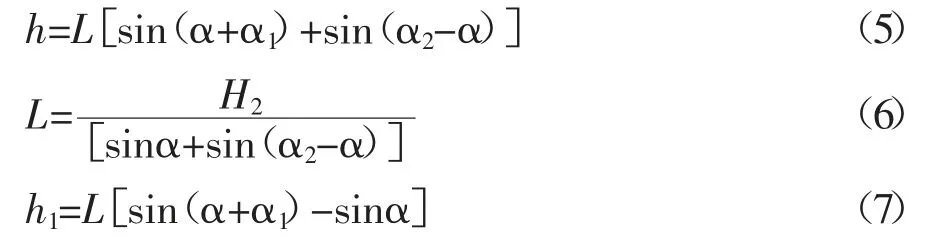
对于四杆仿形机构中的双圆盘开沟器需要播种单体提供一定的向下压力,在作业过程中可以保证以一致的深度平滑开出种子沟。在设计中设置在平行四杆上的拉力弹簧向下方供给压力,对弹簧的力分析将有力于四杆仿形机构的结构设计。四杆机构处于水平、上浮和下浮三种不同位置时弹簧的状态见图5 所示。
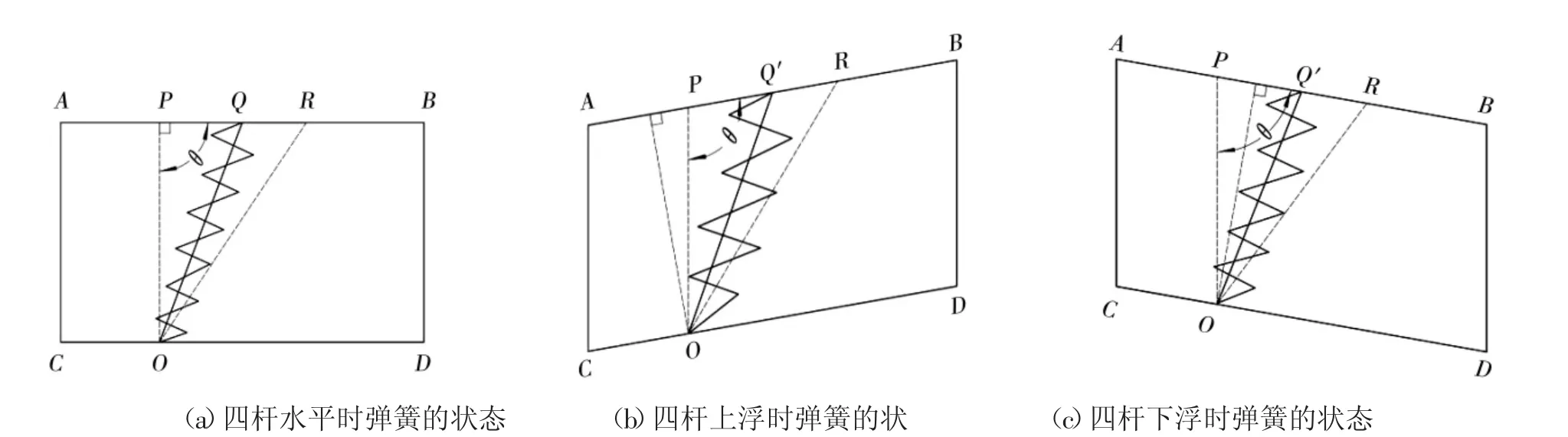
图5 四杆机构处于不同位置时弹簧的状态Fig.5 State of spring when four rod profiling mechanism in the condition of different positions
由图5 可见,当玉米精密播种单体的四杆机构处于水平状态时,连架杆AB 为上连杆,播种单体主梁上连接的是机架AC,播种机前进方向为水平向左,此时弹簧的长度为lOQ;当玉米精密播种单体的四杆机构处于上下浮动时时,机架AC 和连架杆AB 的夹角θ 发生变化,此时弹簧的长度为lOQ′。经分析可得四杆机构分别处于水平时、上浮动时和下浮动时下弹簧的长度分别为:

当仿形四杆机构处于水平位置时,设此时的弹簧拉力为F0,由公式(10)可见,随着夹角θ 的增加,则弹簧的拉伸量增加,弹簧拉力增加,迫使仿形四杆机构由向下运动的趋势,也就是说当随着夹角θ 增加时,由弹簧所产生的垂直向下的分力增加,即当仿形四杆机构向上运动时,弹簧会对四杆仿形机构产生垂直向下的压力,以确保播深的稳定性。设计为了保证弹簧不同的预紧力、单体重量和下压力的需求,在仿形四杆机构的连架杆上通过一根横梁来挂接四个弹簧,并设置了两个挡位,分别为Q 点和R 点,距离铰接点A的距离长度分别为lAQ为170 mm,lAR为230 mm,弹簧下端固定在下杆的点O 上,lOC为92.5 mm。
针对上述弹簧的分析,弹簧主要承受拉伸载荷,选用圆柱螺旋拉伸弹簧,具体技术参数为碳素弹簧钢丝C 级,端部结构采用两端具有可转钩环,弹簧簧丝直径d 为5 mm,弹簧中径D 为30 mm,有效圈数n为28 圈,自由长度H0为207.5 mm,初拉力P0为164N,工作极限载荷Pj为960N,实际极限载荷Pn为768N。
3 结果与分析
3.1 四杆仿形机构的仿真设计
根据玉米精量播种机的工作原理,在充分考了各个零部件结构的基础上,采用UG 软件对玉米精量播种机播种单体结构进行参数化三维建模,见图6所示,主要是由平行四杆仿形机构、波纹圆盘破茬刀、播深调节装置、双圆盘开沟器、限位块、仿形限深轮和拉力弹簧等组成。仿真设计过程中采用了各个零件之间装配所需的同轴、同心和平行等约束关系和运动副的连接关系,通过对装配体的干涉检查、碰撞检查和动态间隙检测,可发现干涉区域,据此优化设计模型,经验证各零件和部件间不存在干涉现象,单体的总体结构设计可行合理。仿真设计的播种单体播深的调节范围10~70 mm,对应的限深轮拐臂长度为260 mm,经计算仿形限深轮直径为367.7 mm,最终选用仿形限深轮规格为101.6 mm×406.4 mm(宽×直径),即可满足不同地块玉米精密播种的播深要求。

图6 玉米精量播种机播种单体结构Fig.6 Seeding monomer structure of maize precise seeder
3.2 四杆仿形机构的运动仿真与分析
四杆仿形机构运动仿真方案见图7 所示。在进行运动仿真时,为减少运动副的数量,同时也能将各个部分的运动关系表达清楚,提高在运动仿真操作时的效率,在进行运动仿真分析前,要根据各运动副对单体运动的影响进行结构简化,在定义连杆时,将具有相同运动形式的部件视为同一连杆。由于在运动仿真中的弹簧柔性形变涉及到有限元分析,将仿形机构上的四个压力弹簧去除,即对于四杆仿形机构的运动仿真,要根据各运动副对单杆运动的影响进行结构简化。在定义连杆时,将具有相同运动形式的部件视为同一连架杆,依次完成四杆机构机架、连架杆和连杆定义,依次将固定机架定义为L001,上连架杆定义为L002,下连架杆定义为L003,连杆整体定位为L004。对四杆仿形机构的机架、连架杆和连杆所形成的转动副,完成J001~J009 转动副的创建,以L002 连架杆为驱动对象,定义谐波函数,幅值35 °,频率为180 °·s-1,名称定义为Drv001。进入结算方案后,分析类型为常规型,时间为1s,步数为300,指定重力方向,数值为默认。解算完成后,可通过运动仿真观察平行四杆仿形的整体运动情况,同时导出J004 旋转副在300 步中所转过的角度数据表,为了方便分析,取步长为0~4 和160~165,见表2 所示。
图7 四杆仿形机构运动仿真方案Fig.7 Motion simulation scheme of four rod profiling mechanism
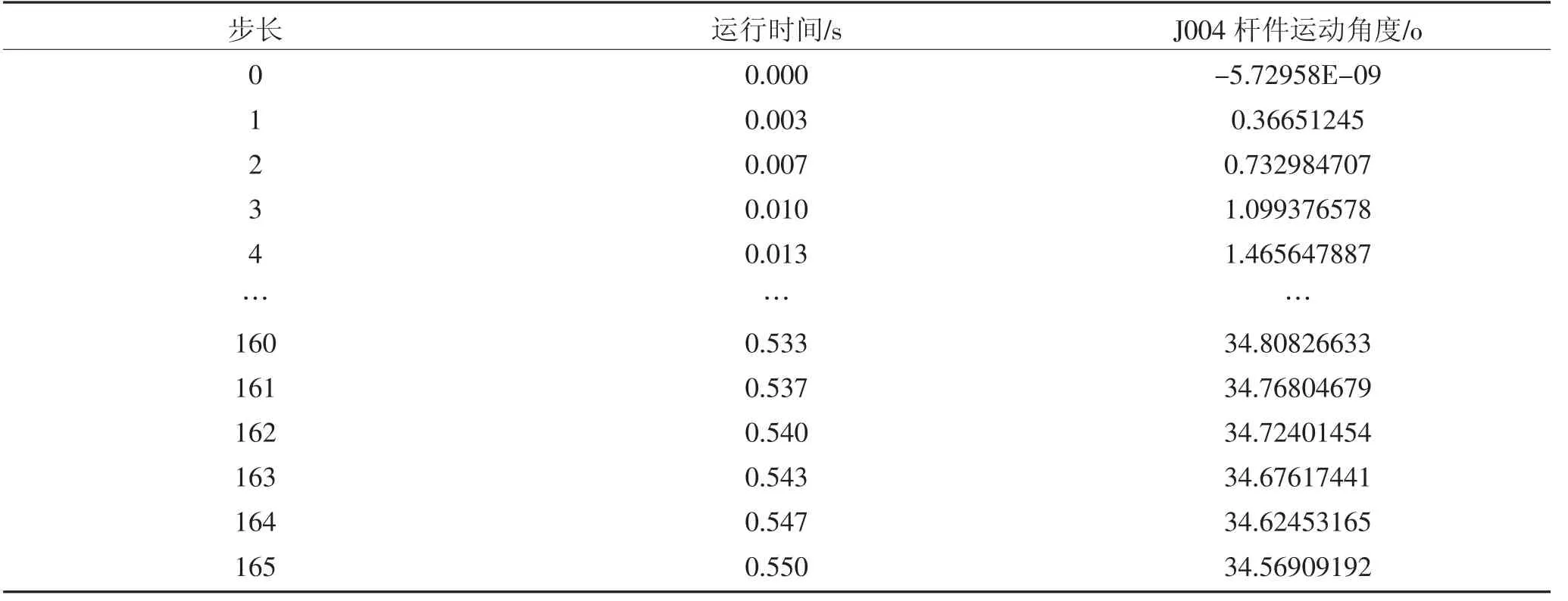
表2 运动仿真数据Table 2 Motion simulation data
由设计结果可得,上仿形角为15 °,下仿形角为20 °,由表2 可见,连架杆从最低点到最高点转过角度为35 °,满足其仿形要求。运动仿真结论为:最终确定四杆仿形机构的关键设计参数为:横向宽度为350 mm,机架长度为205 mm,连架杆长度为350 mm,牵引角为0°,上仿形角为15°,下仿形角为20°,仿形限深轮的直径为406.4 mm,限深轮宽为101.6 mm,播种深度的范围为10~70 mm;所设计的四杆仿形机构满足使用要求,验证了平行四杆仿形机构的合理性。
4 结论
(1)研究设计的玉米精量播种机播种单体结构是由平行四杆仿形机构、波纹圆盘破茬刀、播深调节装置、双圆盘开沟器、限位块、仿形限深轮和拉力弹簧等组成,该播种单体排种器采用指夹式,排肥器采用外槽轮式,覆土镇压采用V 型橡胶圆盘式,传动机构采用链条传动,排种开沟器采用双圆盘式,防堵工作部件采用波纹圆盘式。利用UG 仿真软件建立玉米播种单体的关键部件模型特别是四杆仿形机构,进行了干涉检查和运动仿真分析,检查了设计参数的合理性,提高了关键部件和整机设计质量。
(2)播种单体所配置的四杆仿形机构的仿形量可调,可以适应不同仿形量需求,同时该四杆仿形机构结构参数适合高速作业。所设计的四杆仿形机构的横向宽度为350 mm,机架长度为205 mm,连架杆长度为350 mm,经仿真验证分析得到所设计的四杆仿形机构满足上下仿形量80~120 mm 的使用要求,且满足高速作业的需求,适应性强。
