永磁同步电动机智能自适应积分反推控制*
2022-06-29魏惠芳
魏惠芳
(沈阳城市建设学院信息与控制工程系,沈阳 110167)
0 引言
永磁同步电动机(permanent magnet synchronous motor,PMSM)广泛应用于机器人、电动汽车和机床等中低功率和高性能驱动领域。然而,PMSM系统是由参数时变的高阶复杂动力学组成的非线性系统[1-2]。PMSM的高性能应用要求其控制器具有响应速度快、跟踪精度高、超调量小、抗干扰能力强等特点。尽管线性控制算法已广泛应用于PMSM的控制中,但在跟踪能力和鲁棒性方面的性能还不尽人意[3]。因此,学者们提出了鲁棒非线性控制方法来提高PMSM的控制性能,包括反推控制,自适应控制,智能控制等[4-6]。
反推控制能够实现控制系统的全局跟踪与稳定,但存在“微分爆炸”问题,从而影响控制性能[7-8]。俞沛宙等[9]将自适应反推控制应用于PMSM的速度控制中,采用自适应算法调整参数,有效提高了速度跟踪性能和抗扰性,但自适应律容易产生控制死区。GALLEGOS 等[10]设计鲁棒反推控制器,但并没有提出任何误差补偿机制。
模糊神经网络(fuzzy neural network,FNN)的设计不需要数学模型,并且具有逼近非线性和不确定性系统的能力[11]。为简化FNN的设计,在实际应用中通常采用对称隶属函数。然而,采用对称隶属函数的FNN则需要应用大量的规则,从而增加计算复杂度。为此,学者们利用非对称隶属函数直接扩展标准高斯或三角隶属函数的维数,不仅可以提高网络的学习能力,还可优化模糊规则的数目[12]。此外,小波神经网络也因收敛精度高和收敛速度快受到了广泛的关注。鉴于FNN和小波神经网络的上述优点,若将二者结合,设计一种小波模糊神经网络(wavelet fuzzy neural network,WFNN),并应用于PMSM系统中,则可以进一步增强控制性能。
为提高PMSM系统的鲁棒性和良好的暂态控制性能,设计基于WFNN的智能自适应积分反推控制方法,利用WFNN估计外部集总不确定性,利用自适应积分反推控制来抑制不确定性的影响,从而实现系统对周期参考轨迹的跟踪。最后,通过实验验证了所提出的基于WFNN的自适应积分反推控制系统的跟踪性和鲁棒性。
1 PMSM数学模型
在PMSM的磁场定向控制中,建立d-q轴参考坐标系下的定子电压方程和磁链方程为:
(1)
(2)
式中,ud、uq、id、iq、ψd、ψq、Ld、Lq分别为d、q轴电压、电流、磁链和电感;Rs为电阻;ω为转子角频率;ψf为永磁体磁链。
由于Ld=Lq,可将电磁转矩方程表示为:
(3)
式中,Te为电磁推力;p为极对数;ψf为永磁体有效磁链;km=3pψf/2为电磁转矩系数。
PMSM机械运动方程表示为:

(4)
式中,J为转动惯量;θ为转子位置;D为摩擦系数;T1为外部负载力;Tr为摩擦力和Stribeck力;Tf为饱和磁通;Tc为齿槽力。
为便于控制器设计,将式(4)改写为:
z(t)=θ(t)
(5)
(6)
(7)
式中,z(t)=θ(t)为实际转子位置;x1=ω为角速度;a1=-D/J、b1=km/J>0、c1=-1/J为已知参数;Δa1和Δb1为由系统参数J和D引起的不确定性;u为控制输入。式(7)可改写为:
(8)
式中,y1=Δa1x1和y2=Δb1u为内部未知参数;y3=c1(F1+Ff+Fc+Fr)为外部集总不确定性。
2 自适应积分反推控制器设计
首先,定义跟踪误差e1为:
e1=zd(t)-z(t)=θr-θ
(9)
结合式(6),并对式(9)求导,可得:
(10)
在设计自适应积分反推控制器时,定义稳定函数δ表示为:
(11)
式中,k1和k2为正常数。
定义虚拟速度跟踪误差e2为:
e2=x1-δ
(12)
根据式(8)并对e2求导得:
(13)
由于不确定性y1、y2和y3是未知的,会对控制器设计造成困难,致使参数无法较好地选取。因此,采用自适应算法对不确定参数估计并调整。
假定外部集总不确定性有界,且上界值为η,即y3≤η。定义内部未知参数的估计误差为:
(14)
(15)

定义Lyapounov函数为:
(16)
对式(16)求导,可得:
(17)
(18)
(19)
将式(18)和式(19)代入到式(17)中可得:
(20)
根据式(20),得自适应积分反推控制律u为:
(21)
式中,k3为正常数;η为常数,且为集总不确定性上界值。将式(21)和y3≤η代入式(20)中,得:
(22)
定义
(23)
则有

(24)
由于g(e1(0),e2(0))是有界的,而g(e1(t),e2(t))是非增且有界的,因此可得出:
(25)
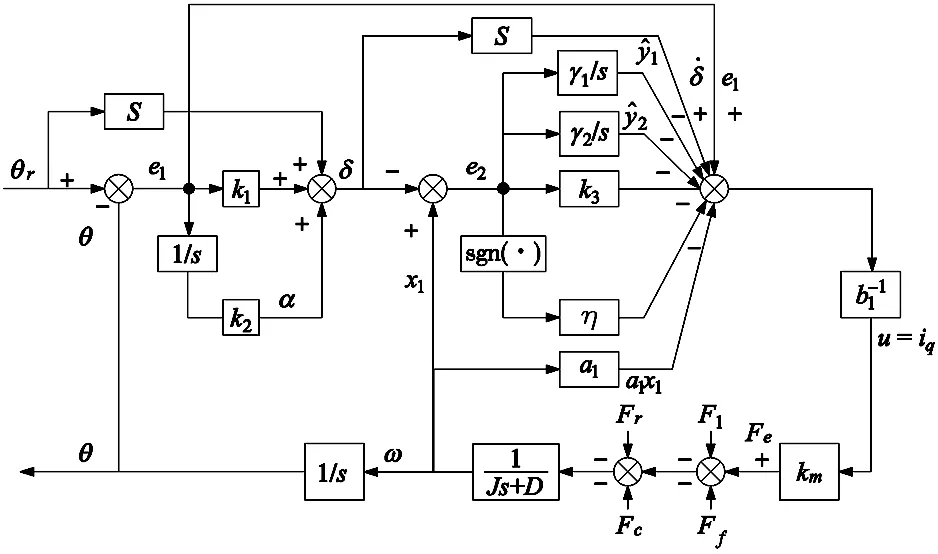
图1 基于自适应积分反推控制的PMSM系统框图
由于实际应用中y3未知,且上界难以确定,因此,需设计不确定性观测器对y3进行观测,并假设在观测过程中为常数。为此,提出WFNN作为观测器,以估计集总不确定性的实际值。
3 WFNN观测器设计
WFNN能够使用足够的规则和训练数据来描述非线性时变系统。WFNN的结构包括输入层、隶属层、规则层、小波和承接层以及输出层,其结构图如图2a所示,隶属层中的非对称高斯隶属函数如图2b所示。
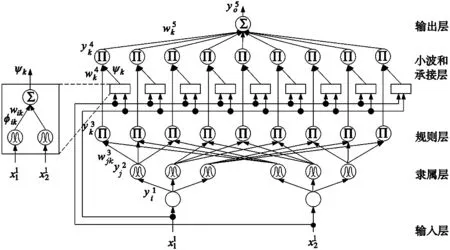
(a)
WFNN各层的信号传播和基本功能如下:
(1)输入层:对于该层中的每个节点,输入节点和输出节点表示为:
(26)

(2)隶属层:在隶属层中,接收域函数采用非对称高斯函数,输入节点和输出节点表示为:
(27)

(28)
(3)规则层:由于规则层中的节点表示一个模糊逻辑规则的预处理部分,因此该层中节点表示为:

(29)

(4)小波和承接层:该层主要包括小波层和承接层。小波层的输出ψk可表示为:
(30)
(31)
式中,aik和bik为小波函数的相关平移和扩展参数;wik为输入层和小波层之间的连接权重。因此,承接层的节点可表示为:
(32)

(5)输出层:输出层中,输出节点充当解模糊器。该层中的输出节点表示为:

(33)

为了用反向传播算法描述WFNN的在线学习算法,定义能量函数为:
(34)
WFNN的参数更新律如下:
在输出层中,要传播的误差项为:
(35)

(36)
(37)
式中,ηw1为承接层和输出层之间连接权重的学习速率。
在小波和承接层中,要传播的误差项为:
(38)
连接权重wik的更新律为:
(39)
wik(N+1)=wik(N)+Δwik
(40)
式中,ηw2为输入层和小波层之间连接权重的学习速率。
在规则层中,要传播的误差项为:
(41)
在隶属层中,要传播的误差项为:
(42)
非对称高斯函数的平均值mj的更新律为:
(43)
mj(N+1)=mj(N)+Δmj
(44)
式中,ηm为mj的学习速率。
(45)
σlj(N+1)=σlj(N)+Δσlj
(46)
(47)
σrj(N+1)=σrj(N)+Δσrj
(48)

因此,基于WFNN的自适应积分反推控制器框图如图3所示。
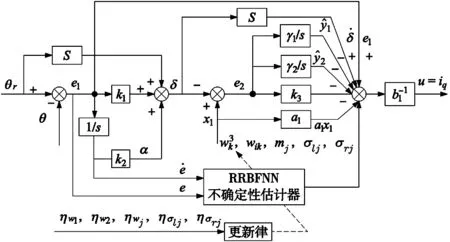
图3 基于WFNN的自适应积分反推控制器框图
4 实验结果及分析
采用数字信号处理器(DSP)的PMSM驱动系统的整体框图如图4所示。该系统由PMSM、斜坡比较电流控制脉冲宽度调制(PWM)、电压源逆变器(VSI)、磁场定向机构、坐标变换、速度控制器、位置控制器和霍尔传感器等构成。
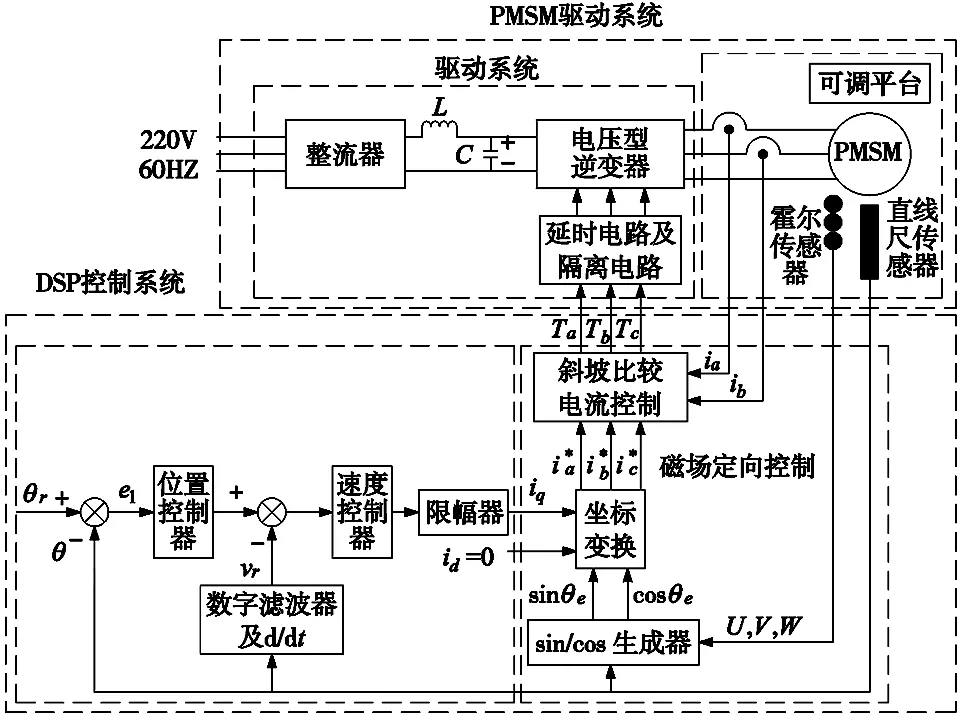
图4 采用DSP的PMSM驱动系统整体框图
实验中所选取的PMSM规格为极对数P=4,转动惯量J=0.038 kg·m2,额定电流I=3.8 A,电感Ld=480 mH,电阻R=3.6 Ω,摩擦系数D=0.008 5 N·m/rad/sec。此外,控制器参数选取为k1=2.2,k2=1.7,k3=2.3,γ1=0.1,γ2=0.1,η=7.5,ηw1=ηw2=0.2,ηm=0.5,ηlσ=ηrσ=0.5。
为验证自适应积分反推控制的有效性,分别采用反推控制、自适应积分反推控制和基于WFNN的自适应积分反推控制对比实验。对PMSM系统给定信号为如图5所示的幅值为2.5 mm的梯形信号。对系统进行参数变化,使实际的转动惯量调整为标称值的2倍。且在1.5 s时,突加150 N的负载。采用3种方法的位置跟踪误差曲线如图6所示。通过对比图6中3种控制方法的误差曲线可以看出,在1.5 s时,基于WFNN的自适应积分反推控制方法的位置跟踪误差曲线的幅值最小,约为0.02 rad,相比于反推控制的0.08 rad和自适应积分反推的0.04 rad相比,跟踪精度优良明显提高。这证明了基于WFNN的自适应积分反推控制方法对负载扰动和参数变的抗干扰性能最优。同时,基于WFNN的自适应积分反推控制方法的位置跟踪误差曲线的曲线最为平滑,这表明自适应积分反推控制方法对参数变化的抗摄动能力最优。综上所述,基于WFNN的自适应积分反推控制方法拥有良好的位置跟踪性能和鲁棒性。
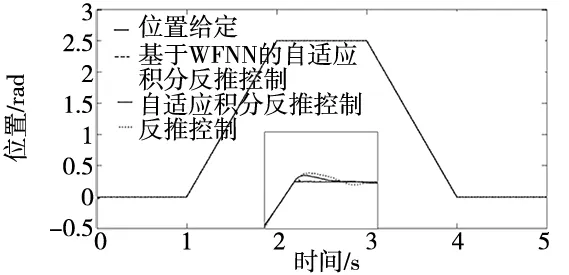
图5 基于梯形信号的位置跟踪曲线
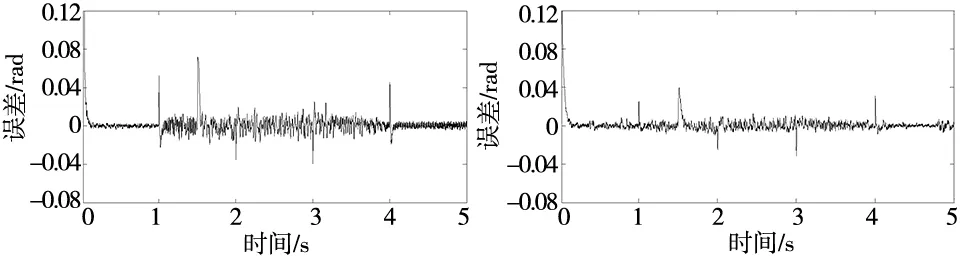
(a) 反推控制 (b) 自适应积分反推控制
5 结论
针对PMSM驱动系统易受参数变化、外部扰动、以及摩擦力等干扰影响的问题,本文设计了基于WFNN的自适应积分反推控制方法,主要贡献如下:
(1)根据Lyapunov函数,成功地设计了自适应积分反推控制方法,以减小外部集总不确定性的影响。
(2)为解决由于不确定性未知而造成参数难以选取的问题,采用WFNN对不确定参数进行估计并在线调整,进一步提高PMSM系统控制性能。
通过实验表明,在参数扰动和负载扰动的条件下,基于WFNN的自适应积分反推控制方法具有良好的位置跟踪性能和更好的抗干扰能力。
