基于改进MRAS的永磁同步电机无位置传感器控制
2022-06-29卜金林梅建伟
卜金林,梅建伟
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
无传感器控制是根据电机绕组中的相关电信号,通过适当的算法估算出转子的转速和位置[1-2]。目前常用的算法包括模型参考自适应系统(model reference adaptive system, MRAS)控制算法[3-4]、滑模观测器算法[5-6]、扩展卡尔曼滤波器算法[7]等。根据MRAS 控制算法的原理及辨识思想可知该算法相对简单,具有参数易收敛和鲁棒性强等优点,但是传统MRAS控制系统中转速环采用PI调节器,系统的控制精度和抗扰动能力较低。文中采用滑模速度控制器和MRAS 相结合来优化传统MRAS控制系统中存在的问题。通过介绍永磁同步电机(permanent magnetic synchronous machin,PMSM)的数学模型,构建改进MRAS 和滑模速度控制器模型,采用Popov超稳定理论证明了所设计自适应律的渐进稳定性,将转速及转角的估测量线性化[8],在PSIM中搭建仿真模型验证了该控制策略的有效性。最后以DSP 芯片TMS320F28335 为主控制芯片,搭建PMSM 实验平台,在空载和转速突变的情况下来验证了控制算法的可靠性。
1 PMSM数学模型
为了便于控制器的设计,选择在同步旋转坐标系下建立完全解耦的PMSM数学模型,其中定子电压方程可以表示为
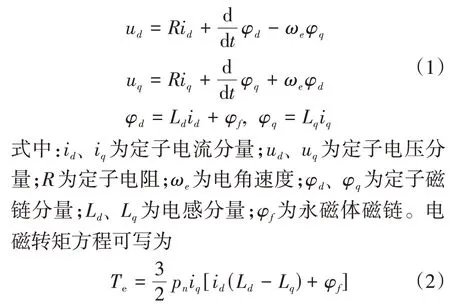
式中:pn为极对数。文中采用的是表贴式PMSM,即Ld与Lq相等。
2 改进MRAS
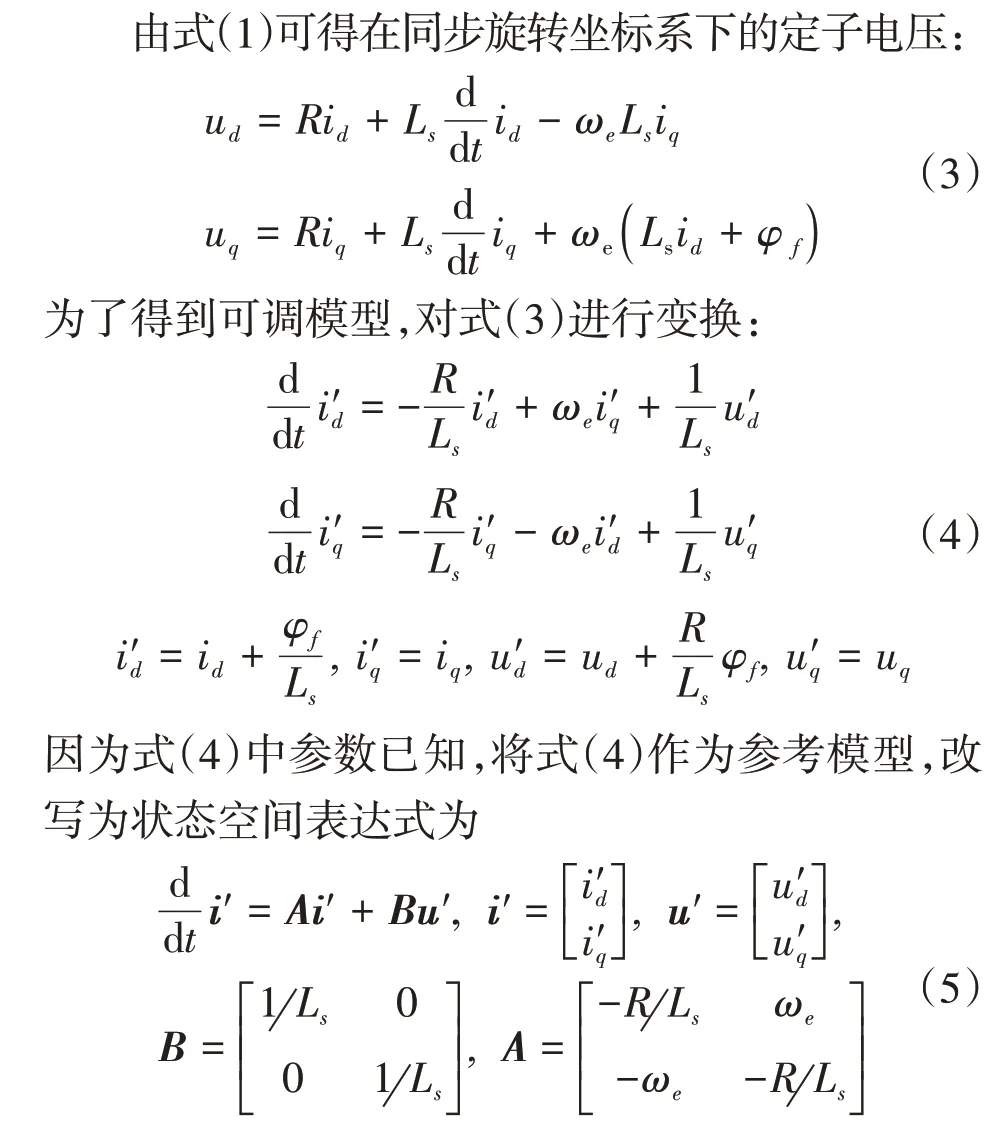
2.1 参考模型与可调模型
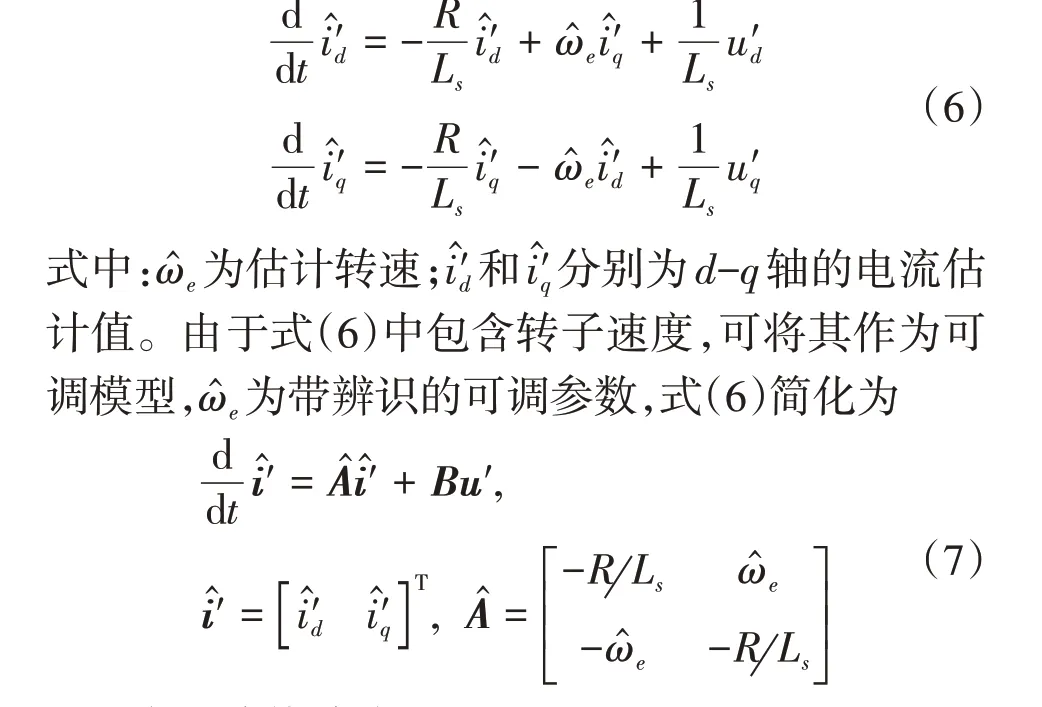
式(4)可以用估计值表示为
2.2 自适应律的确定
为了得到转速的估计值ω^e,需要选择合适的自适应律,结合式(4)和式(6)构造输出误差方程:
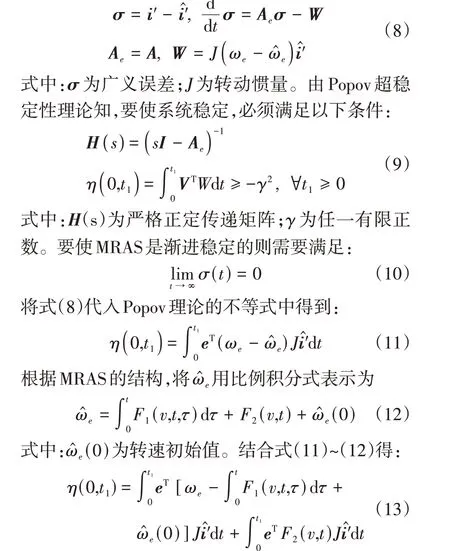
当t1和γ2为任一有限正数时,式(10)成立,即设计的自适应律符合Popov超稳定性理论判据,证明了设计的MRAS是渐进稳定的。自适应律为
转子位置的表达式为

2.3 滑模速度控制器设计
在传统MRAS控制系统中,因为PI调节器对外界扰动信号敏感,而滑模速度控制器对外界扰动信号不敏感且响应速度很快,因此用滑模速度控制器来代替PI速度调节器。滑模面定义为
式(19)中的积分项可以优化PI调节时系统抖动和稳态误差较大的问题。
2.4 PMSM无位置传感器控制框图
采用d轴电流分量为零的控制策略,根据建立的数学模型画出基于MRAS 的PMSM 无位置传感器控制框图如图1所示。
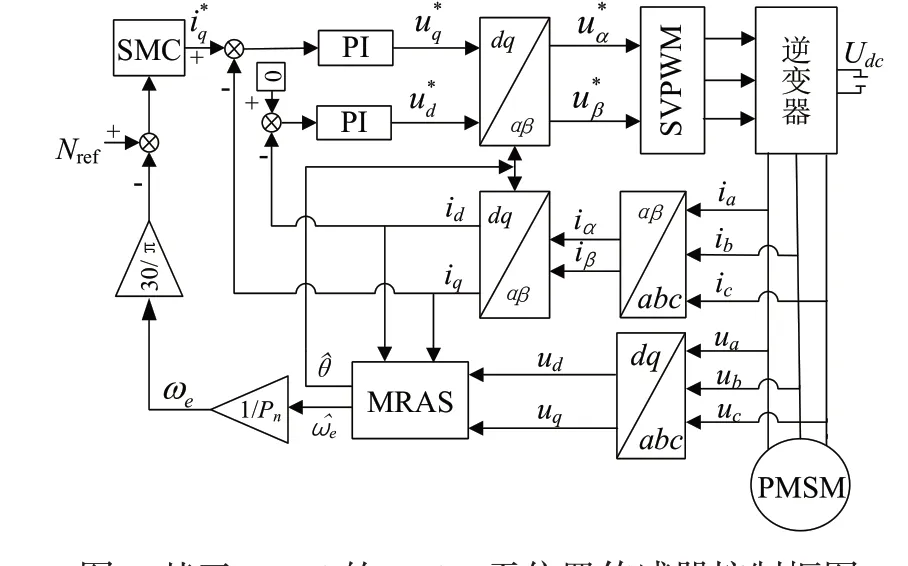
图1 基于MRAS的PMSM无位置传感器控制框图
3 仿真及实验结果分析
3.1 仿真分析
在PSIM 仿真环境下搭建传统MRAS 和改进MRAS 的仿真模型,在同样的条件下分别进行仿真,模型中所采用的PMSM参数如表1所示。
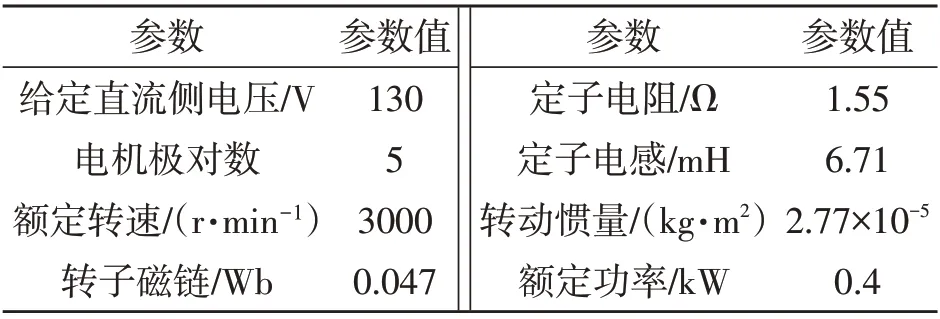
表1 PMSM仿真系统参数
对逆变器输出端的三相电压信号进行采样,通过Clarke变换和Park变换后得到d-q轴的电压,根据式(6)可得到d-q轴的电流估计值,仿真模型如图2所示。将d-q的实际电流输入与估计电流相减得电流误差再结合式(15)得到估计转速,由式(15)可得到转子位置估计值,仿真模型见图3。
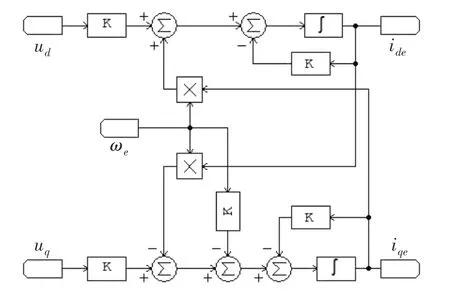
图2 d-q 轴电流估计值仿真模型
对PMSM 无位置传感器控制系统在空载时进行仿真分析,系统的稳定转速设置为1000 r·min-¹,对应的转速变化曲线如图4所示,转子位置变化曲线如图5所示。由图4可知基于PI调节器的MRAS系统在0.15 s 之前实际转速与估计转速有着明显的误差,但是在基于滑模速度控制器的MRAS系统中实际转速与估计转速之间误差较小,表明在空载启动时改进的MRAS 系统能有效减小转速误差。由图5可知,基于滑模速度控制器的实际转子位置和估计转子位置的重合度更高,说明基于改进MRAS的控制策略具有较高的稳态估计精度。
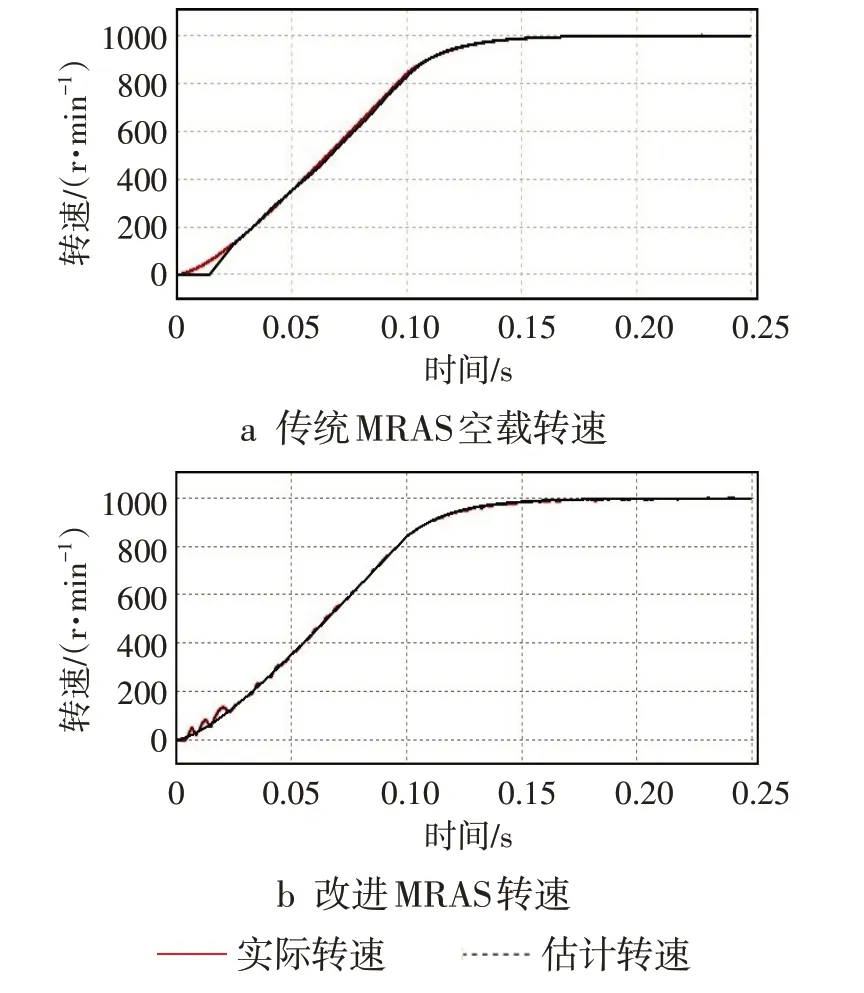
图4 空载时转速变化曲线
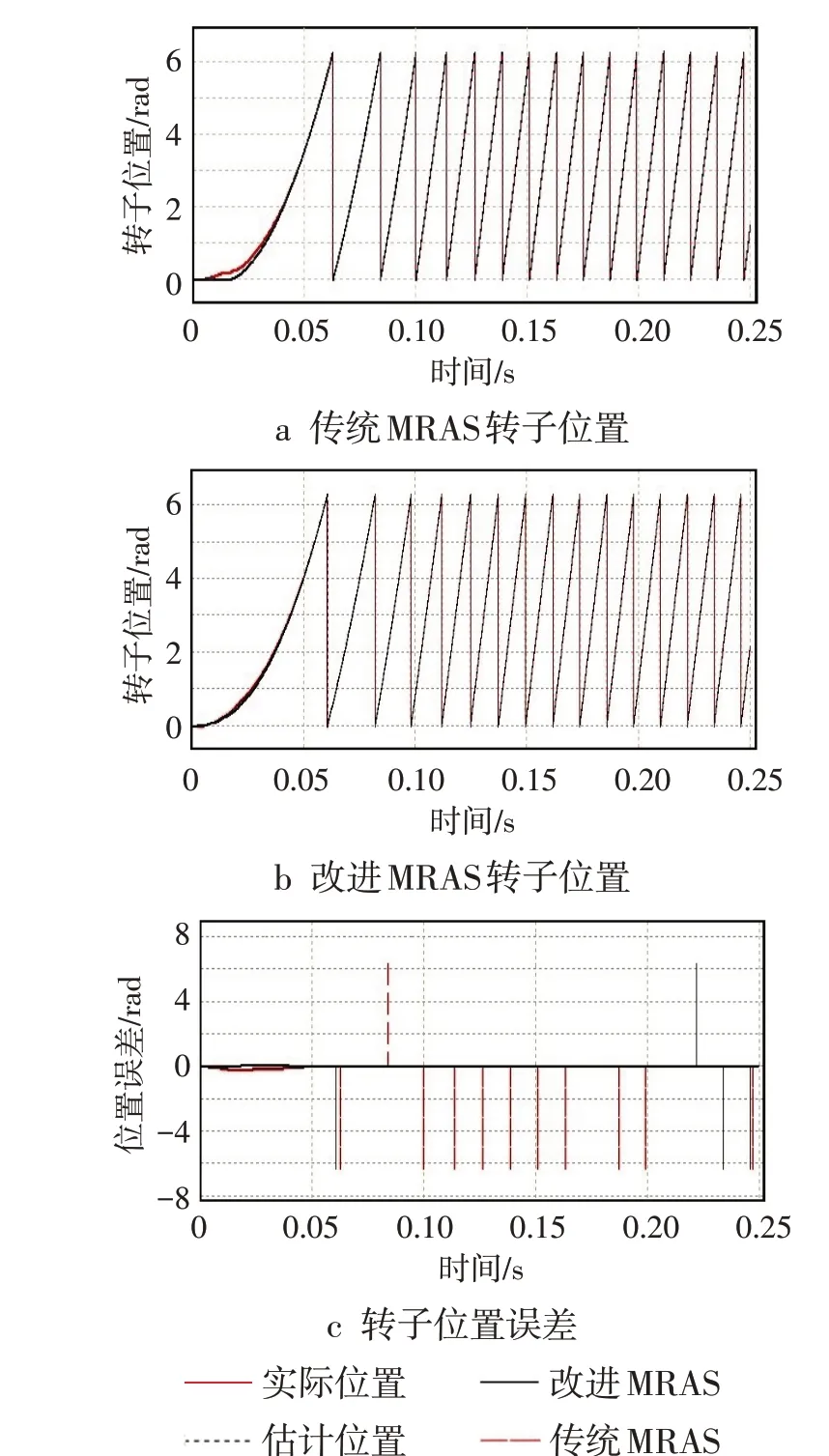
图5 空载时转子位置及误差变化曲线
当电机达到给定转速1000 r·min-¹时,分别在0.35 s 时给电机加负载,在0.35 s 时将电机的转速由1000 r·min-¹变为1500 r·min-¹,对应电机的转速变化曲线如图6~7 所示。由图6 可知,在0.35 s 时改变电机负载,改进后的MRAS控制系统相比于传统的MRAS 控制系统转速波动范围小且恢复稳定的时间缩短,说明改进后的系统在外加干扰的情况下动态性能更好。由图7 可知电机在达到稳定转速之前传统MRAS 转速误差为90 r·min-¹,在改变转速后转速误差最大为20 r·min-¹,而改进后的系统转速误差在1000 r·min-¹之前最大为60 r·min-¹,在转速变化后最大误差为10 r·min-¹,结果表明改进后的系统具有更高的精度和动态性能。
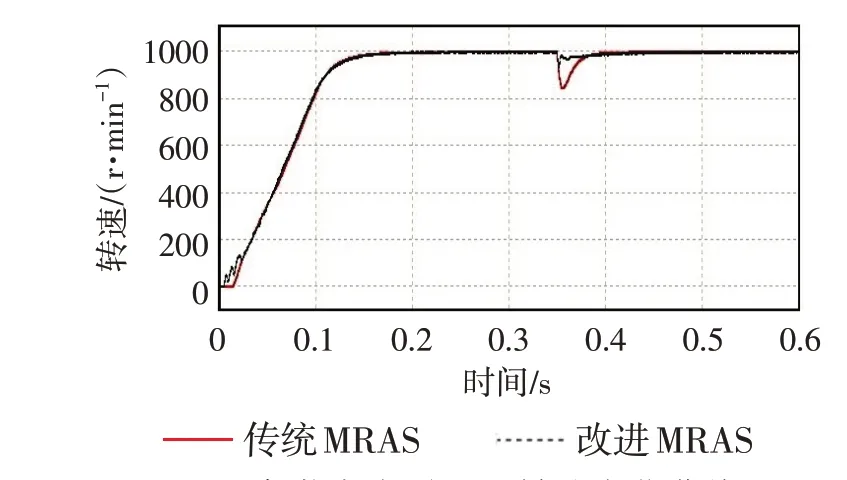
图6 负载突变时电机转速变化曲线
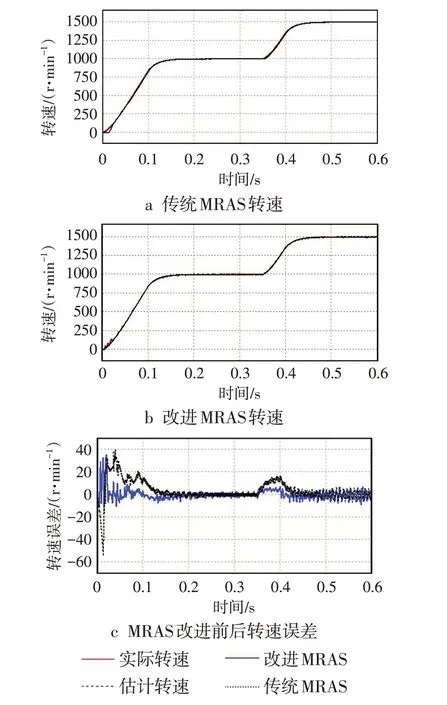
图7 转速突变时转速变化曲线
3.2 实验验证及结果分析
为了验证改进的MRAS 控制系统在实际控制中的性能,选用额定功率为400 W 的PMSM,以TMS320F28335 为控制核心,借助于DSP Oscilloscope 功能和SCI 功能,搭建了参数可调且可以实时观察参数变化曲线的实验平台,如图8所示。

图8 PMSM实验平台
空载情况下将电机转速设定为1000 r·min-¹,观察电机运行情况,然后将电机转速由1000 r·min-¹突然上升为1500 r·min-¹,电机转速变化曲线如图9所示。在空载启动时转速在0.15 s内快速稳定,此时转速波动范围在25 rad·min-¹,当转速突变时系统同样在0.15 s内快速恢复稳定,且转速波动范围在25 r·min-¹,证明系统具有良好的动态响应和较高的控制精度。
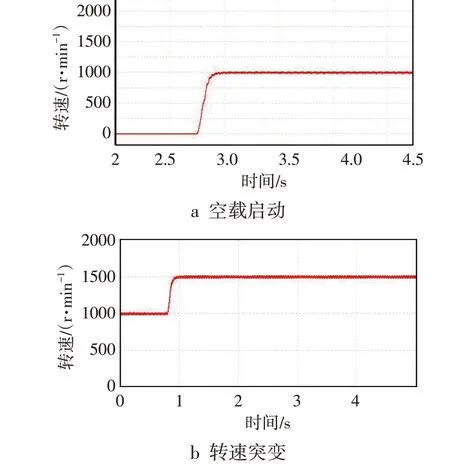
图9 电机转速变化曲线
4 结论
在PMSM 矢量控制的基础上,提出改进MRAS控制算法,在PSIM中搭建仿真模型,并借助实验平台进行验证,最后对结果进行分析,由仿真及实物结果分析可知系统在外加扰动的情况下能快速恢复稳定,且实际值与估计值的误差很小,验证了该策略具有良好的动态响应,提高了系统的误差精度,鲁棒性强。
