基于多参数融合的行为安全监测研究
2022-06-28李小奇郑建立
李小奇,郑建立
(上海理工大学医疗器械与食品学院,上海 200093)
0 引言
国家统计局于2021 年5 月11 日发布的第七次全国人口普查结果显示,全国老龄化程度进一步加深,60 岁以上人口数为26 402 万人,约占总人口数的18.70%,相较于2010 年人口比重上升了5.44 个百分点[1]。随着全球老年人口增多,老年人监护问题受到了人们的普遍关注[2]。由于年龄增长,身体的各种机能逐步衰退,极易发生跌倒。跌倒是一种突然、不自主、无意识的姿势变化,其中步态失衡是指无意识跌倒在地上或更低的平面[3]。分析表明,跌倒是人体受伤的主要原因,也是全球第二大意外死亡原因,尤其对老年人而言更为致命。据WHO 报告显示,每年全球因跌倒而死亡的人数超过30 万,其中年龄在60 岁以上的占一半以上,跌倒已成为老年人日常受伤的“元凶”之一。
1 国内外研究现状
由于跌倒检测根据应用特征参数和使用相关技术不同,现阶段可分为以下3 类[3]:基于视频图像的跌倒检测[4]、环境传感器的跌倒检测与可穿戴式的跌倒检测。
1.1 基于视频图像的跌倒检测
谢辉等[5]利用Le2i 数据库和采集的跌倒行为视频数据作为训练数据集,基于OpenCV 框架开发了一套跌倒检测系统。系统能准确区分日常行为与跌倒行为,识别跌倒行为的准确率高达96%。高苗等[6]采用改进的ViBe 算法对视频前景进行提取,经过形态学方法处理后能够有效去视频除噪声。实验表明,该算法能准确、快速地检测运动的目标。马凌云等[7]提出了基于单应性的投影重合率特征和投影变化速率特征检测算法,该算法能对“疑似摔倒事件”进行初步判定。Chen 等[8]提出了一种基于视频的人体跌倒检测算法,该算法能在静止状态下实现高精度实时检测。
1.2 基于环境传感器的跌倒检测
Chandra 等[9]借助附加特征减少了计算量,提高了计算效率,检测准确率高达95.53%。Sixsmith 等[10]提出了基于S-IMBAD 模型的监测报警系统,显著提高了系统功能的可靠性。
1.3 基于可穿戴式的跌倒检测
王翔等[11]比较分析了现阶段基于MEMS 和磁阻传感器的姿态检测系统和数据融合算法。季祥等[12]通过建立右手坐标系,以俯仰角、横滚角、足底压力为依据,通过支持向量机确定阈值,判断人体行为动作。赵晋伟等[13]设计了以FPGA 为核心的多传感器姿态融合算法和导航位置解算方法,相较于传统算法在长期稳定性和精度上都具有显著提升。徐涛等[2]设计了一种基于加速度传感器的检测方法,通过监控加速度幅值进行跌倒检测。欧国维等[14]结合四元数卡尔曼滤波进行姿态识别和活动强度分析。崔瑞超等[15]通过自适应加权信息融合技术,对传感器模型进行分析。薛源等[16]通过结合人体倾角信息和足底压力阈值作为判断跌倒依据。李坤等[17]融合加速度计和陀螺仪的特征参数,设计了基于阈值多特征参数的跌倒检测算法。Kim 等[18]提出了一种三轴加速度传感器和深度传感器相联合的跌倒检测算法。Li 等[19]基于训练数据确定阈值,同时最大化算法的检测概率,提出了一种最优检测算法。
然而,上述跌倒检测技术都存在一定的缺陷,例如基于视频图像的跌倒检测技术无法保障使用者的隐私;基于环境传感器的跌倒检测技术受场地限制的同时易受外部噪声干扰;基于可穿戴设备的方法虽然结构简单、使用简便、成本低,但目前仍缺乏统一的阈值设定标准。
由于在跌倒过程中必然伴随着身体高度变化,目前高精度高度微型传感器的出现给跌倒检测带来了新的思路。结合三轴加速度和角加速度传感器,可将融合的高度变化率和姿态角变化率作为检测跌倒的联合判据。基于此,本文设计了一种可穿戴式跌倒检测装置,通过采集高度和加速度数据,融合多种传感器参数检测跌倒。
2 可穿戴装置系统设计
可穿戴式跌倒检测系统的硬件包含主控芯片、加速度传感器和高度传感器三个部分。其中,主控芯片选择支持低功耗蓝牙5.1 的多核微控制器DA14695,该芯片采用Cortex-M33 内核,片内SRAM 大小为512KB。加速度传感器选择MPU6050,最大量程范围可达±16g,角速度全格感测范围为±2 000°/sec(dps),可精准追踪快、慢速动作。高度传感器模块SPL06 的量程范围为-500~+9 000m,精度小于0.09m,采样频率为50HZ。系统硬件总体框如图1所示。
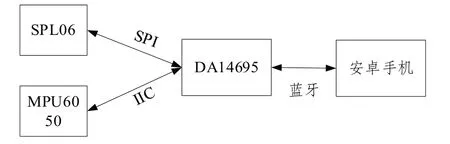
Fig.1 Overall design block diagram of wearable device hardware图1 可穿戴设备硬件整体设计框图
系统上电后,初始化各模块,不断循环采集加速度、角速度和高度信息,并将数据通过蓝牙模块与手机互联实现数据实时传输。运算模块通过控制模块对跌倒行为进行判断并发出警报。系统运行模块总体框图如图2所示。
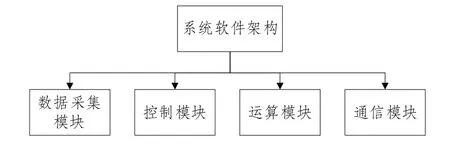
Fig.2 Overall module composition block diagram of wearable device hardware图2 可穿戴设备硬件整体模块框图
3 多参数融合跌倒检测算法
3.1 卡尔曼数据融合
对于动态系统的状态估计,卡尔曼数据融合是一种高效递推滤波器(自回归滤波器),可在一系列不完全或包含噪声的测量中估计动态系统的状态,统计每一被测量数据不同时间的值,通过分析其在各时间的综合分布,估计未知变量。系统的状态方程如式(1)所示:
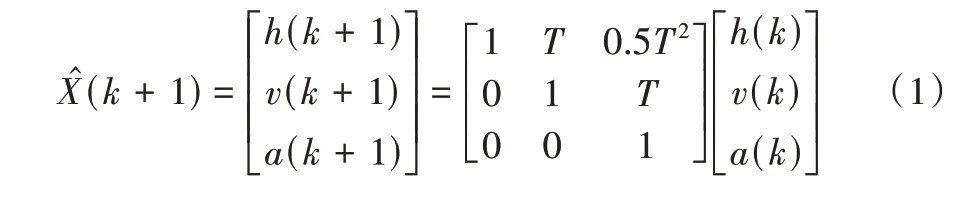
其中,k表示当前时刻,k+1 代表下一时刻,T为时间间隔,(k+1)为k+1 时刻状态矩阵,h(k)为k时刻的高度,h(k+1)为k+1 时刻的高度,v(k)为k时刻的速度,v(k+1) 为k+1 时刻的速度,a(k) 为k时刻的加速度,a(k+1)为k+1时刻加速度。
状态方程的观测输出矩阵Y为k时刻加速度a(k)和k时刻气压P(k)。当海拔较低且变化范围在几百米以内时,气压与高度呈线性关系,即气压每变化ΔP时,高度变化0.09×ΔP。由此可得式(2),其中P0为初始气压值。
式(3)中根据高度传感器的实际测量值Y(k),通过卡尔曼增益K(k)计算本次高度的最优估计X(k+1)。H为状态变量到测量(观测)的转换矩阵,(k+1)为k+1 时刻估计的状态矩阵。比较融合了加速度信息前后的高度信息如图3所示。
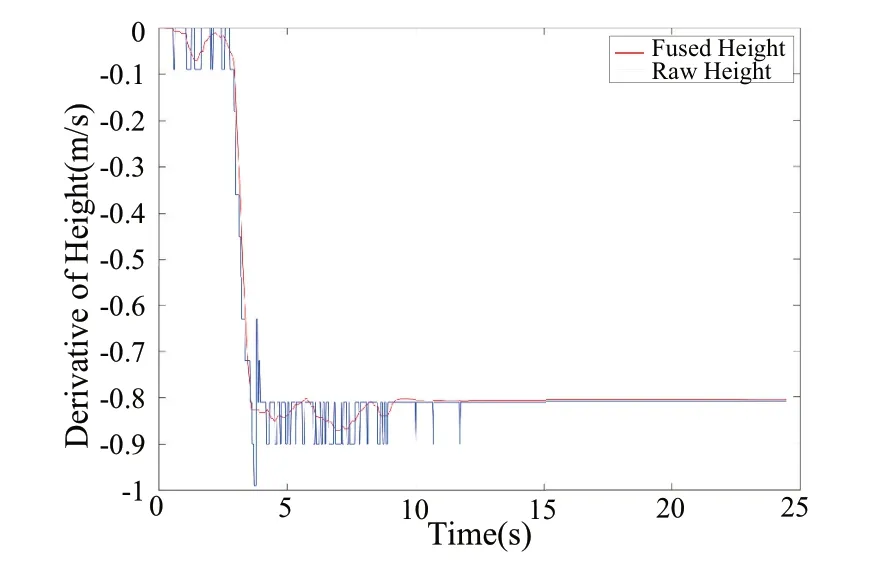
Fig.3 Height comparison before and after fusion图3 融合前后高度对比
由图3 可见,相较于原始高度数据,融合加速度信息后高度变化更平缓,可直观反映实际高度的变化数值,并由于加速度计的快速响应特性,弥补了高度计反映滞后的缺陷。因此,本文将两者融合可有效提升系统的响应速度和抗干扰能力。
3.2 姿态解算算法
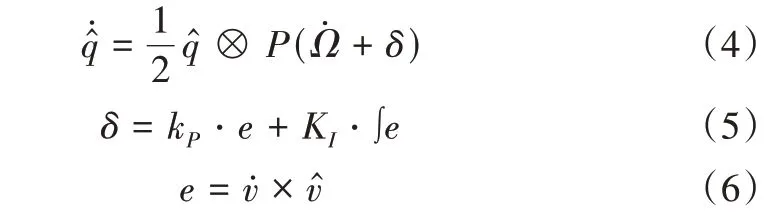
由于人在不同行为过程中,加速度和角加速度会动态发生变化。为了避免在实际测量过程中外界因素的干扰,在实际姿态解算中常用四元数和互补滤波相互融合获取姿态角,作为日常行为检测系统的补充判据,以准确反映人体姿态变化。常用Mahony 姿态解算算法输出人体的三个姿态角,主要过程分为以下3 个步骤,具体运算过程如式(4)-式(6)所示。
4 实验结果与分析
由于人在运动时重心的加速度会发生变化,因此重心处的加速度是跌倒检测的重要信息。本次实验将装置佩戴在实验者的腰部,选取了男、女各5 名志愿者,采集他们在12 种日常行为过程的数据,包括走路、跑步、站立、坐下、上楼、下楼、乘坐电梯、跳跃、向前倒、向后倒、向左倒、向右倒,为了避免实验的偶然性,每组动作反复采集10次。其中,采集主要日常行为的数据信息如表1所示。
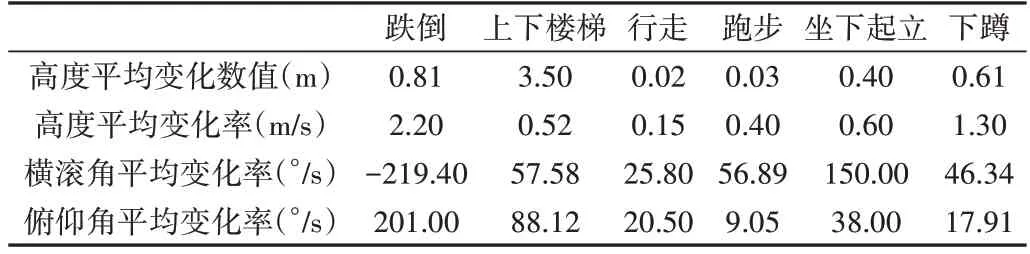
Table 1 Summary of main daily behavior characteristics表1 主要日常行为特征汇总
如图4、图5 可见,人体在发生跌倒时高度变化率明显高于其它日常活动的数值。同时,人体姿态变化角度出现极大值。基于融合后的高度及欧拉角变化率作为判据,实验结果如图4 所示,在跌倒发生时融合算法曲线能在1s 内趋于稳定,即使在跌倒过程中高度传感器数值发生剧烈波动,融合后的曲线仍能保持稳定,体现了系统的鲁棒性。
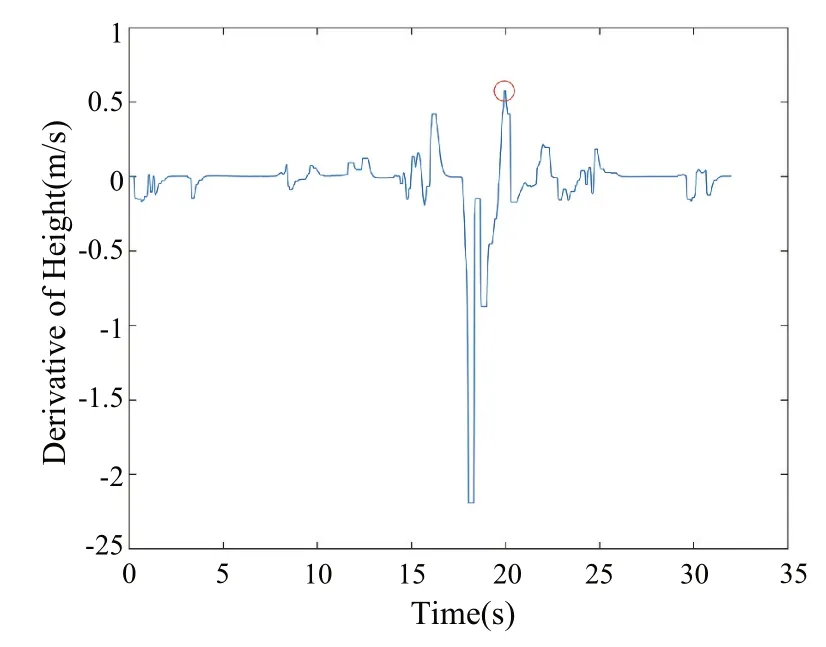
Fig.4 Height change rate图4 高度变化率
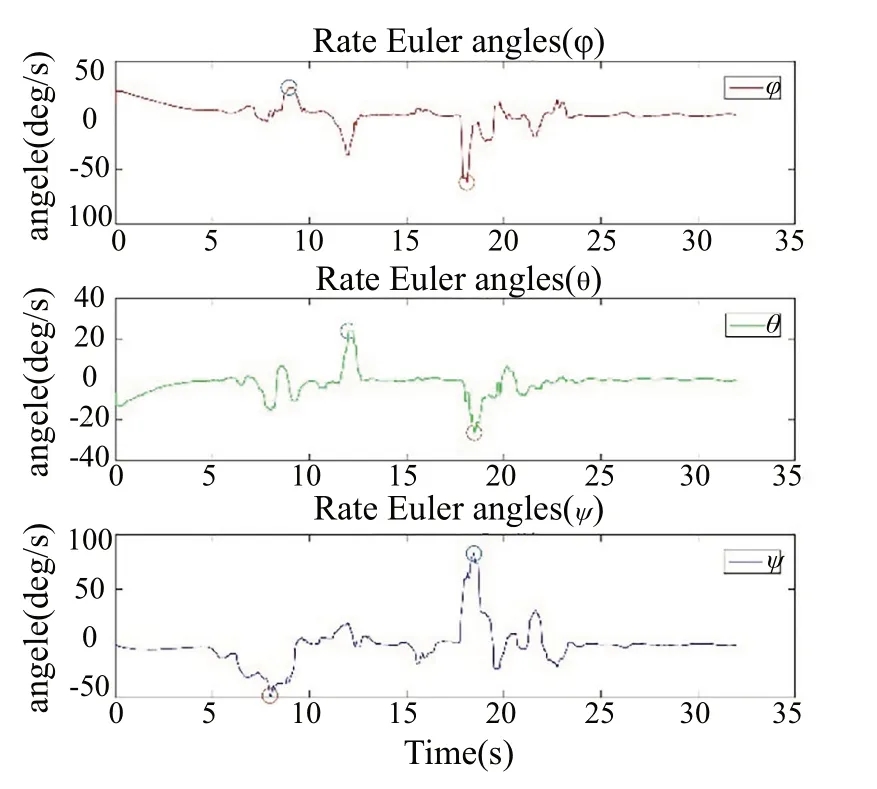
Fig.5 Change vate of Euler angle图5 欧拉角变化率
5 结语
本文通过对老人日常行为的跟踪调查与数据分析,设计了一种基于DA14695 平台的多参数融合跌倒检测系统。通过采集人体日常运动的加速度、角速度、高度等信息,采用卡尔曼滤波算法融合加速度传感器和气压计计算高度变化率,利用Mahony算法检测姿态角变化率。
实验结果表明,高度与姿态角的变化率在跌倒和非跌倒行为中有着显著差异,以此作为判据条件的平均准确率为95%。该方法在结合加速度传感器高灵敏度特点的同时,避免了外界温度和气压对高度传感器的干扰,能够准确采集高度变化信息。