一种改进的图像灰度匹配方法
2022-06-27童伟
童 伟
(通号城市轨道交通技术有限公司,北京 100070)
1 概述
目前国内的城市轨道交通信号系统已经进入到全自动驾驶的阶段,全自动运行系统(Fully Automatic Operation,FAO)模式下地铁列车已经可以在没有司机的情况下运营。技术升级削减人工,但对于隧道、线路空间中出现的障碍物,则需要障碍检测装置的介入替代人为对环境因素的判断。通常障碍物检测采用传感器,即依靠雷达或者机器视觉。
机器视觉(Machine Vision)是模拟人对图像感知、判读过程,通过对光学设备收集的真实场景图像以及红外、雷达等非接触式传感器的采集信息进行分析、计算、处理后得出可靠的信息,用于控制机器人或者相关装置的动作的一门学科。机器视觉系统中最常用也最为重要的功能是图像模式匹配。通过图像模式匹配,可以实现目标校准、测量、检测以及分类等应用。图像模式匹配中比较常用的一种方法是图像灰度匹配(Grayscale Matching),以目标图像中灰度梯度或像素灰度信息作为比较的特征值,通过一系列的对比、计算活动,生成模板图像与目标图像区域之间归一化互相关值(Normalized Cross-Correlation)来确定匹配区域。
2 常见灰度匹配方法
常见的图像灰度匹配方法先对图像灰度进行归一化,然后在目标图像中滑动模板图像,可以计算出目标与模板的两幅图像比较区域的归一化互相关值,从而确定目标与模板匹配的范围、区域。若用I表示像素的灰度值,IMax和IMin代表原图灰度的最大值及最小值,InewMax和InewMin代表线性归一化图像所包含灰度信息的最大值及最小值,那么如公式(1)所示,可以计算线性归一化的图像灰度。

若采用尺寸为K×L的模板图像T(x,y),将其在尺寸为M×N的图像f(x,y)中从上到下、从左到右顺序移动(K≤ M 且L≤ M)时,它与目标图像中点(i,j)处区域的互相关值如公式(2)所示。

由于灰度匹配中的计算像素的乘积之和是互相关值,所以互相关值与图像灰度幅值的大小变化强相关。为避免或减少偏差,实际中通常使用下面归一化互相关值(Pearson相关系数),来消除图像灰度幅值的影响,如公式(3)所示。


Pearson相关系数计算结果在 [-1,1]区间,值越大说明模板和其覆盖的目标图像区域越相似。
在实际应用中,当被测目标在图像中平移和灰度变化时,归一化互相关值(Pearson相关系数)可保持良好的匹配结果,但是当图像的尺度变化和旋转时,归一化互相关值则匹配度特别敏感。通常来说,只有在图像不发生尺度变化,且被测目标仅在10°以内旋转时,才能较好地完成图像的匹配过程。而当图像有缩放时,直接使用这种匹配方法几乎无法得到实用的匹配结果。为了提高图像灰度匹配过程的实用性,必须设法使其尽量减少对图像的尺度变化和旋转关联,即具有尺度不变性和旋转不变性。
要使图像处理算法具有尺度不变性和旋转不变性,一般要对模板进行多次缩放或旋转。在每次缩放或旋转后,都要使用得到的模板重复一次与目标图像的匹配过程,最后再从所有归一化互相关值中选出极大值,并将其对应的区域作为匹配结果输出。在此过程中,缩放比例或旋转角度的间隔越小,匹配的准确程度越高,但计算量也越大。此外,求归一化互相关值的过程本身也需要很大的计算量,若再按照上述方法去获取尺度和旋转的不变性,得到的匹配结果根本不具有实用性。因此需要对不变性和实时性进行权衡,使灰度匹配算法结果在两个维度均能被实际应用接受。
3 改进型灰度比较方法
考虑实际地铁工程应用中,被测目标在拍摄到的图像中尺度变化极小,因此为了提高算法的实用性,可放弃灰度匹配算法对尺度不变性的支持,不进行各种尺度的模板与图像中目标的匹配计算,而是专注于将图像灰度匹配过程的旋转不变性和实时性提升至大多数机器视觉应用可接受的范围。具体来说,可使用“高斯图像金字塔(Gaussian Pyramid)法”和“先粗后细的匹配(Coarse-to-Fine Matching)”策略,来兼顾旋转不变性和实时性。在机器视觉学习和匹配过程中,同时对模板及目标图像进行多次隔行隔列的二进制下采样,生成多幅逐渐递减的高斯图像金字塔(尺寸为1/4倍、分辨率为1/2倍),从而有效减少后续计算数据量,如图1所示。在学习阶段,算法自动计算模板图像已生成的最高金字塔等级,然后提取金字塔的各层和多次旋转后生成图像中的特征值。接下来针对模板数据,算法进行分析,确定最迅速给出且最为精确的“最优”金字塔级,然后将其连同特征数据一起保存在模板图像中,为后续相关数据处理提供信息。
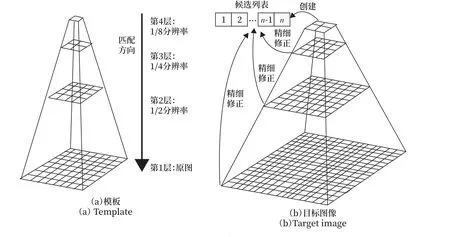
图1 高斯图像金字塔与先粗后细匹配示意Fig.1 Schematic diagram of Gaussian Pyramid and Coarse-to-Fine Matching
本算法在图像匹配阶段是从图像金字塔的最高层开始,对该层与相应的模板图像进行灰度匹配。由于缩小了模板和目标图像,可以很快完成整个匹配运算过程。为弥补因下采样导致的图像信息丢失对算法可靠性的影响,可以在最高层匹配时就建立一个候选匹配区域列表,记录多个可能的匹配区域。对于各低层分辨率较高的模板和金字塔图层,则仅对其重新计算候选区域与模板的归一化互相关值。
为能兼顾旋转不变性和实时性,算法在金字塔最高层进行灰度匹配时,不仅在目标层滑动缩小后的模板计算目标及匹配图像的归一化互相关值,还会先以一个较粗的角度间隔旋转模板,再对归一化互相关值较大的多个区域按照较小的旋转角度进行精细匹配。而这种情况下的候选区域列表,则基于所有归一化互相关值,按由大到小的顺序来选择创建。此后,对于各低层模板和金字塔图层,算法则不仅基于较高分辨率重新计算候选区域与模板的归一化互相关值,还会按照更小的旋转间隔对其进行更新。计算完成后,最终的记录列表中归一化互相关值最大的区域,即为与模板最相似的匹配区域。
4 结束语
以上改进的图像灰度模式匹配方法适合解决大多数常规的机器视觉问题,但应注意该方法对图像的尺度变化(仅能处理小于±5%的尺度变化)和光源的非线性变化适应性较差。此外,当目标旋转角度大于±10%时,该算法的实时性会下降,因此实际中应通过其他辅助手段限定目标的旋转角度或考虑使用几何匹配法。
在城市轨道交通中,由于线路上的物品相对较为单一,图像尺度变化较少。本方法应用可以有效地提高对目标的识别,为障碍物的识别提供一种有效的算法。