一种超视距组网无人机载通信系统设计*
2022-06-27张捷,杨晨,刘学
张 捷,杨 晨,刘 学
一种超视距组网无人机载通信系统设计*

(1 天津航天中为数据系统科技有限公司天津 300458 2 天津市智能遥感遥测数据处理技术企业重点实验室 天津 300458)
针对超视距集群作业需求,提出将Ka频段高通量卫星技术与TD-LTE协议区域组网技术相结合,构建一种“1+N”架构的无人机载测控通信系统。通过方案介绍,阐述了卫星、组网、载荷等模块的设计思路、方案选型及实物设计结果,明确核心单元特点。详细论述了异构网络通信、平滑低延时传输、信源加密等关键技术,并完成链路余量计算、带宽时延测试及飞行试验。试验结果表明:系统任意终端间双向通信稳定可靠,方案设计合理可行。相比于卫星、组网单模通信方式,系统在长航距集群测控、任务协同、临场机动及应用资费等方面具有明显优势,为后续构建空天一体化多平台支撑通信系统,提供工程实践参考。
无人机;超视距组网;异构网络;任务协同;集群测控
引言
随着无人机技术不断升级,无人机在以应急通信、测绘巡检、情报侦察、反恐察打为代表的行业应用越发广泛。面对多种测控通信需求,文献[1]提出基于蓝牙与数传模块的无人机通信系统设计,可实现区域集群测控,但通信距离短、传输速率较低,不满足长航距任务要求。文献[2]提出5G与集群组网相结合的通信思路,信息传输便捷,但大部分海域与偏远山区无信号覆盖,应用场景受限。各科研院所研制的多型谱视距通信链路,在相控阵天线与大功率前端增益下,可实现上百公里的有效通信,而面对山区、丘陵、多建筑物等非通视环境,也需增加地面站、无人机、卫星等中继转发节点[3]。文献[4]提出了带状接力测控设计,有效改良单节点中继方案,作业距离更远,但航行线路固化,缺乏机动应变能力。文献[5]提出Ka频段卫星通信策略,在实现超视距高通量通信基础上,有效提升了资源利用率与抗干扰性能,然而单机任务模式在区域覆盖、并行作业、战场生存及应用成本等方面仍存在诸多不足。
针对无人机自主收发起降技术愈发成熟,受现代航空母舰应用与无人机协同作战启发[6,7],为应对超视距条件下大范围、高带宽、机动灵活的集群作业需求,设计了一套融合Ka频段卫星通信与星型区域组网技术的无人机载通信系统。该系统以大型远程任务无人机为支撑平台,搭建高通量卫星通信主链,同时挂载区域组网终端,与多架轻小型便携自主收发无人机一起构建“一主多从”的区域组网次级链路。本文介绍了无人机载通信系统的整体框架与工作流程,阐述了系统方案设计与关键技术实现,完成了相关性能指标测试,并给出飞行测试结果。
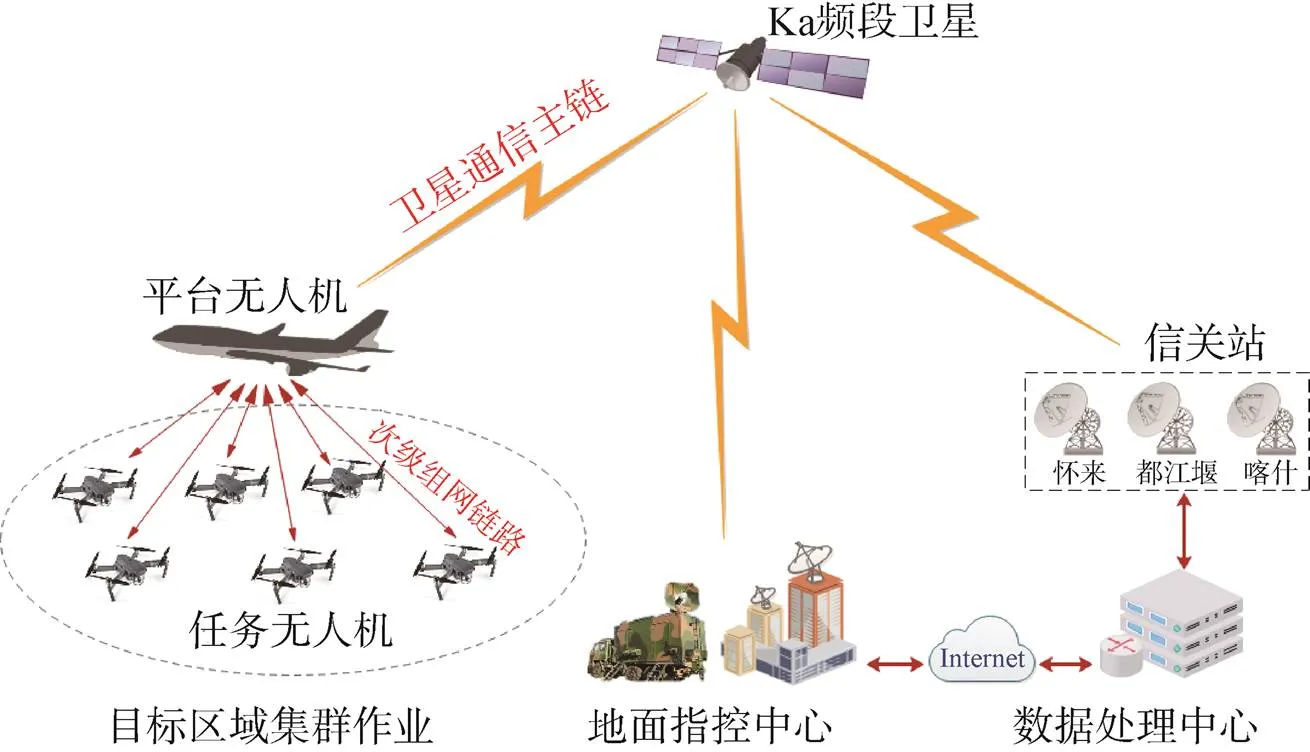
图1 无人机载通信系统框图
1 系统总体框架与工作流程
本文设计的无人机载通信系统总体框架如图1所示,整套链路拓扑采用“1+N”模式设计,即“1”为高通量卫星通信主链,“N”为区域集群组网二级链路。其中,卫星通信由无人机载终端、卫星、信关站、数据处理中心及地面指控中心组成,而区域组网链路则由系统分设机载主/从终端节点,以星型网状结构实现数据交互。远程平台无人机装备机载总线接口单元,通过多种高低速总线协议,实现两级链路业务的快速传递。
根据信息流向,无人机载通信系统包含前向链路与返向链路两个过程。前向链路传输是指:地面指控中心向平台无人机发送目标区域信息、航迹规划、作业科目及遥控指令,平台无人机解析并转发给任务无人机;返向链路传输是指:任务无人机通过装备载荷完成业务数据捕获,依据链路拓扑结构,经平台无人机、卫星转发至地面指控中心,同时回传两级无人机的航迹姿态、遥测信息、系统状态等飞行数据。系统信息传输过程如图2所示。
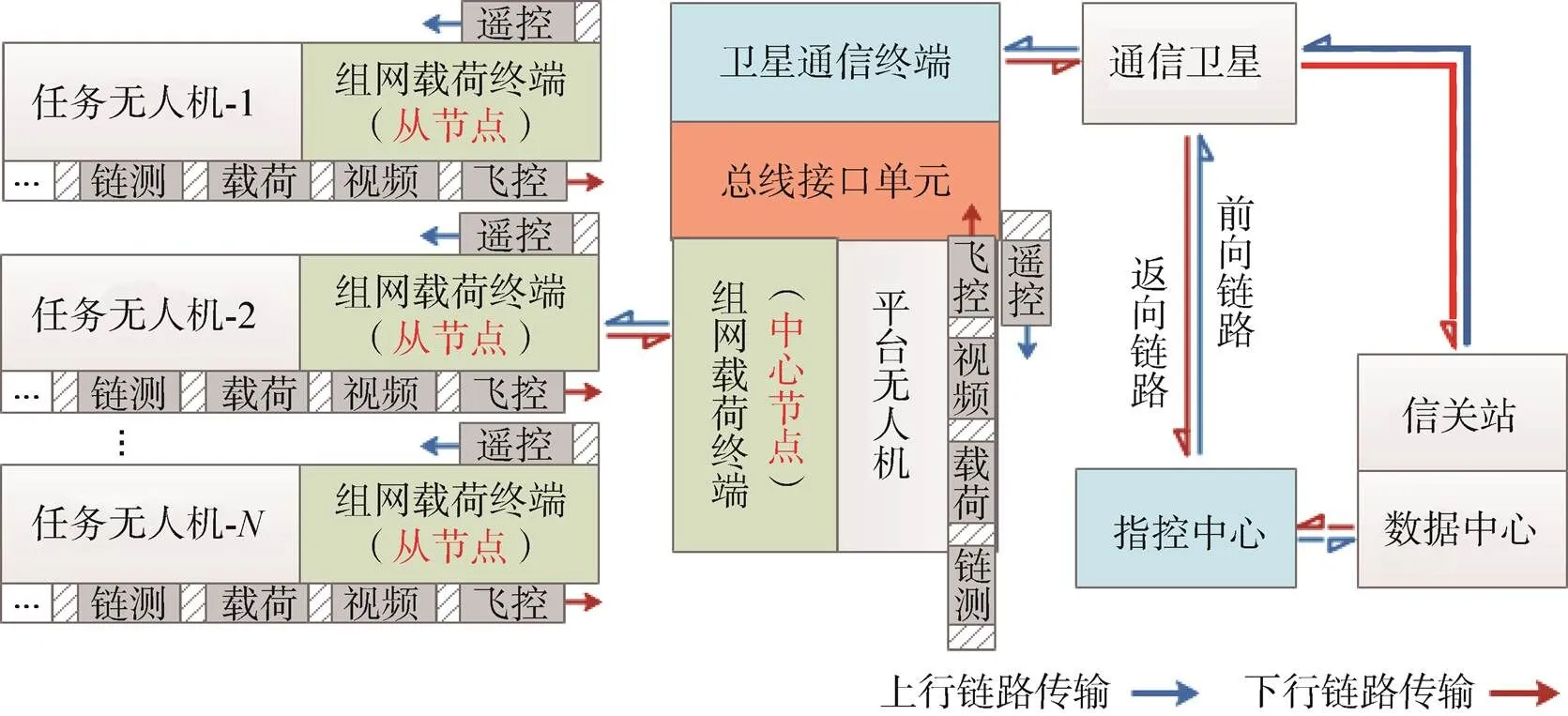
图2 系统信息传输过程
2 系统方案实现
2.1 卫星通信模块设计
卫星通信为整套通信系统的主干链路,在转发卫星选择上,需要考虑卫星波束覆盖范围、转发效率、噪声干扰、等效全向辐射功率EIRP(Effective Isotropic Radiated Power)及接收品质系数G/T(Gain-Temperature Radio)等参数,以实现机载卫星通信终端的最优设计。L、S频段主要用于卫星移动电话,相对速率较低;C频段常用于卫星固定通信业务,带宽趋于饱和;Ku频段在传输能力上提升明显,但存在资源紧张、覆盖盲区多、技术复杂、易干扰、资费高等问题;Ka频段采用多点波束、空分复用的架构设计,在通道带宽、波束覆盖、越区切换、抗干扰能力、终端尺寸、IP化设计、流量资费等方面占据明显优势[8],故本方案选择Ka频段的中星-16。
卫星通信模块框架结构如图3所示,主要由接口适配器、调制解调器、射频单元及动中通天线伺服控制系统等部件组成。其中,接口适配器负责业务处理、同步缓存、协议解析及多类型接口通信等工作;调制解调器则实现基带数据编译码与调制解调过程,基于前向低速遥控与返向高速业务考虑,其设计的主要性能指标见表1;射频单元实现收发信号放大与噪声抑制,保障链路双向传输性能;动中通天线伺服控制系统负责卫星实时跟踪对准与信号收发,由于Ka频段波束较窄,伺服系统采用精度惯导与方位俯仰组合扫描跟踪协同判决的控制方式,以实现动中通天线高精度跟踪对星,设计模型如图4所示。
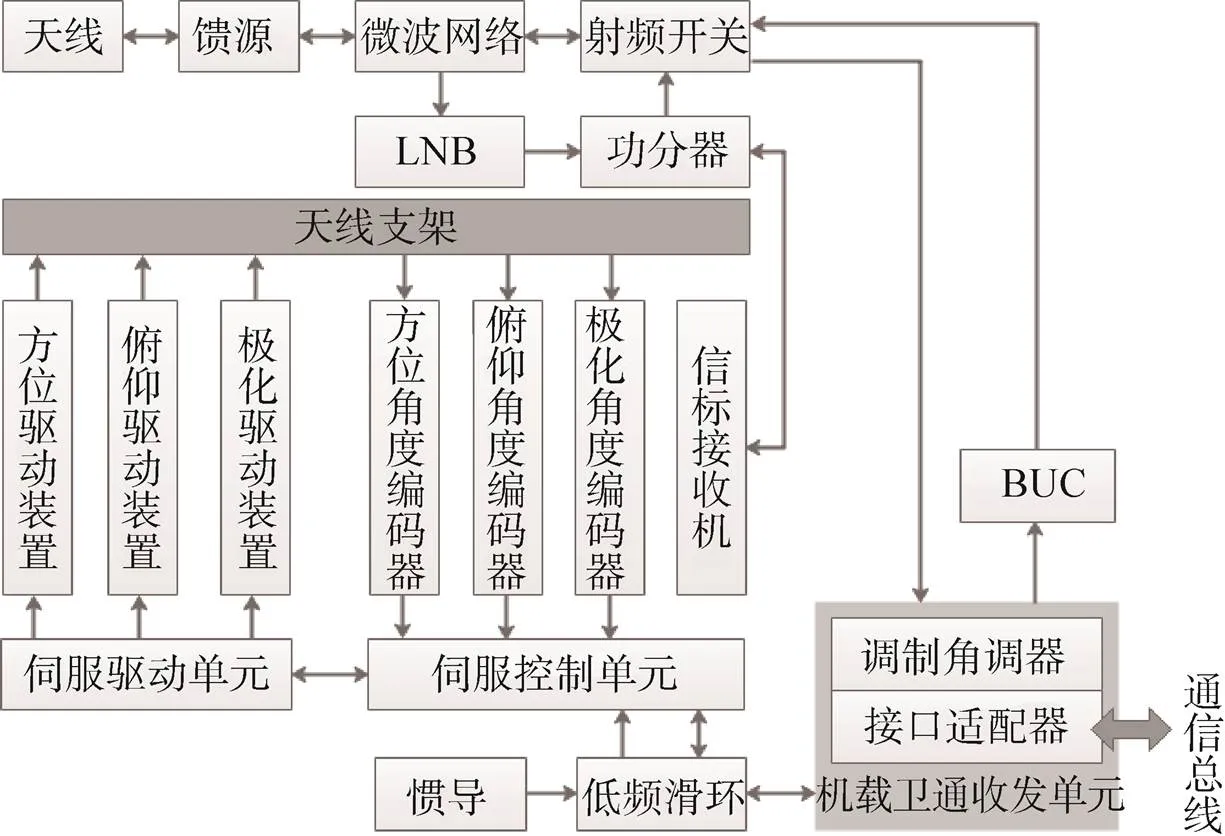
图3 卫星通信模块框架结构
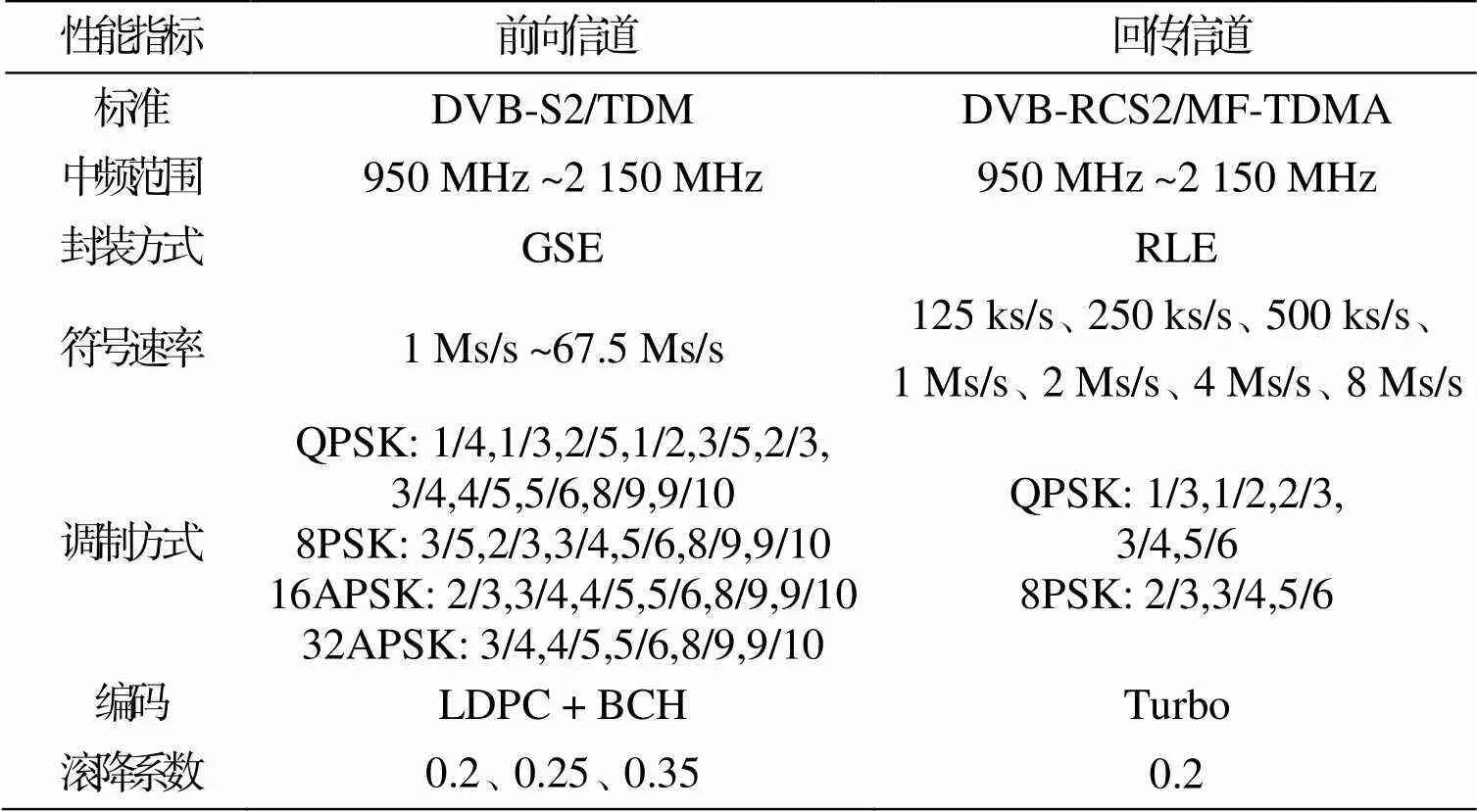
表1 调制解调器性能指标

图4 动中通伺服系统设计模型
2.2 组网与载荷模块设计
组网链路实现多任务协同的集群测控功能,在网络拓扑与通信协议选型上,重点考虑信道容量、传输时延、动态扩展、抗干扰能力及系统维护管理等因素[9]。综合考虑,本方案选择基于TD-LTE移动通信协议的星型网络拓扑架构,该协议采用正交频分复用OFDM(Orthogonal Frequency Division Multiplexing)与多进多出MIMO(Multi Input Multi Output)技术,扁平化系统设计,在传输时延、数据吞吐量、抗干扰能力等方面均有良好表现。同时,星型拓扑结构简单,可实现任务同步分配与多点业务汇集,减少多跳路由时延,满足动态接入、协同测控和维护管理的应用需求。
在硬件设计方面,为减少设备尺寸重量,降低系统功耗,适配轻小型无人机装备应用,方案采用组网通信与任务载荷集成一体化设计,包含核心处理器、无线通信模块、视频采集单元及系统接口单元等四个部件,可实现视频采集编码、载荷控制监测、任务调度管理、数据缓存融合及无线建链通信等功能,框架结构如图5所示。结合业务应用需求与网络拓扑设计,系统选用海思Hi35xx系列处理器与大唐电信LC1860系列无线通信芯片,作为系统主控与通道传输的核心任务载体,具体方案选型与性能参数见表2。
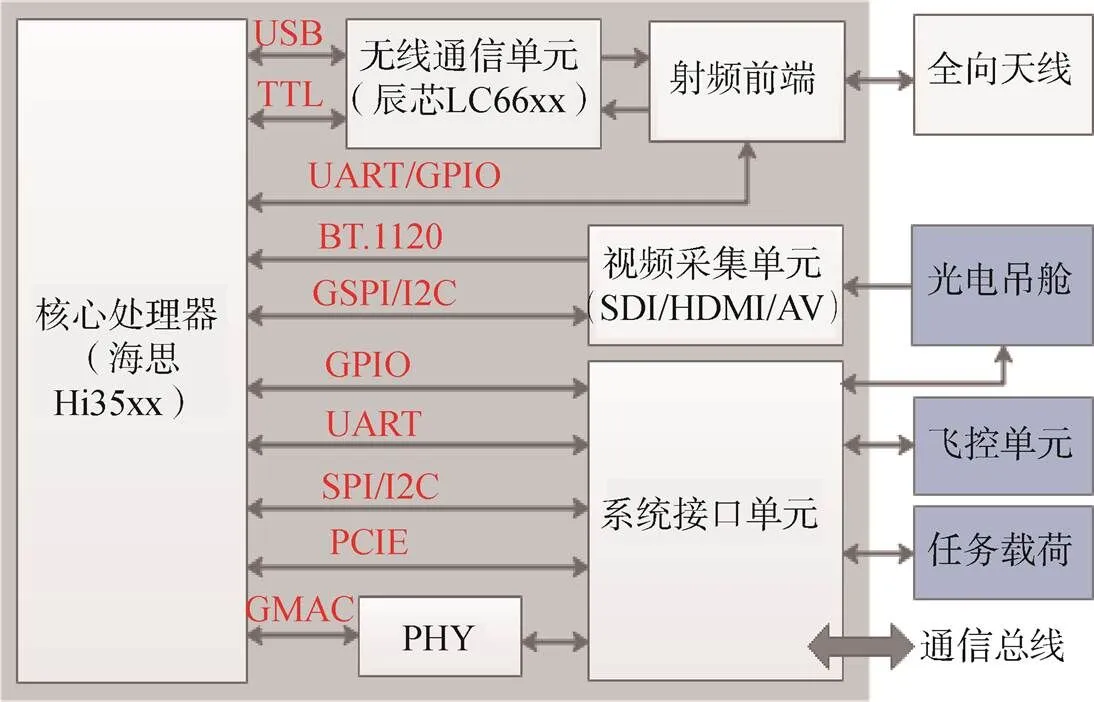
图5 组网与载荷模块框架结构
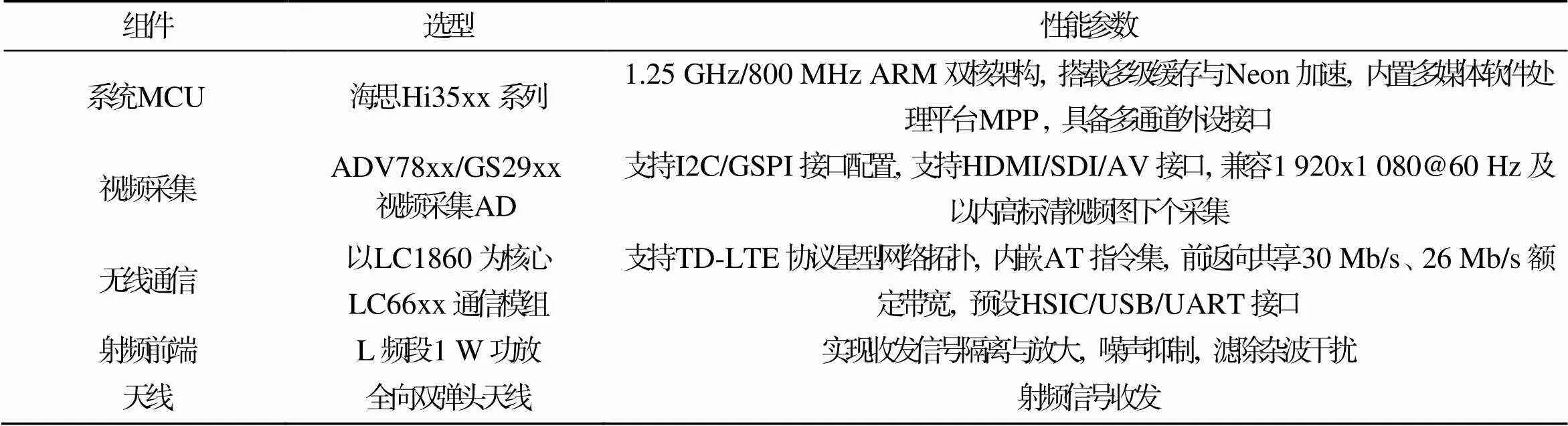
表2 方案选型与性能参数
在链路维护方面,考虑星型网络拓扑存在主节点异常会致使整个网络瘫痪的情况,为提升系统鲁棒性,方案增加主节点热备份设计,即在平台无人机部署多个相同配置的中心节点设备,同时开机上电,由后台监控系统决策对外通道使能切换,工作终端与备份终端通过高速网络接口实现信息实时同步,镜像共生,共同维护从节点网络状态;当工作主节点状态异常,通过监测预警与超时判断机制,实现从节点网络到备份主节点设备快速迁移,有效保障从节点任务机飞行安全。
在视频处理方面,为适配多种载荷吊舱,系统采用可替换式AD子板设计,通过不同采集芯片,实现常规接口类型与不同分辨率的视频图像接入,后经BT656/BT1120/MIPI Rx等接口传输,进入媒体处理平台。采用视频缓存池动态分配模式,通过申请大块物理内存切割单元包,实现视频缓存块在各处理模块间快速传递,有效提升内存使用效率,降低通道延时,视频处理流程如图6所示。
组网终端实物如图7所示,设备整体重量小于290 g,功耗小于6 W,外接1 W功放与两个全向弹头天线,锁定主从支路前返向链路带宽分别为2 Mb/s、8 Mb/s,组网通信链路节点测控正常,可满足距离20 km以内有效通视传输。
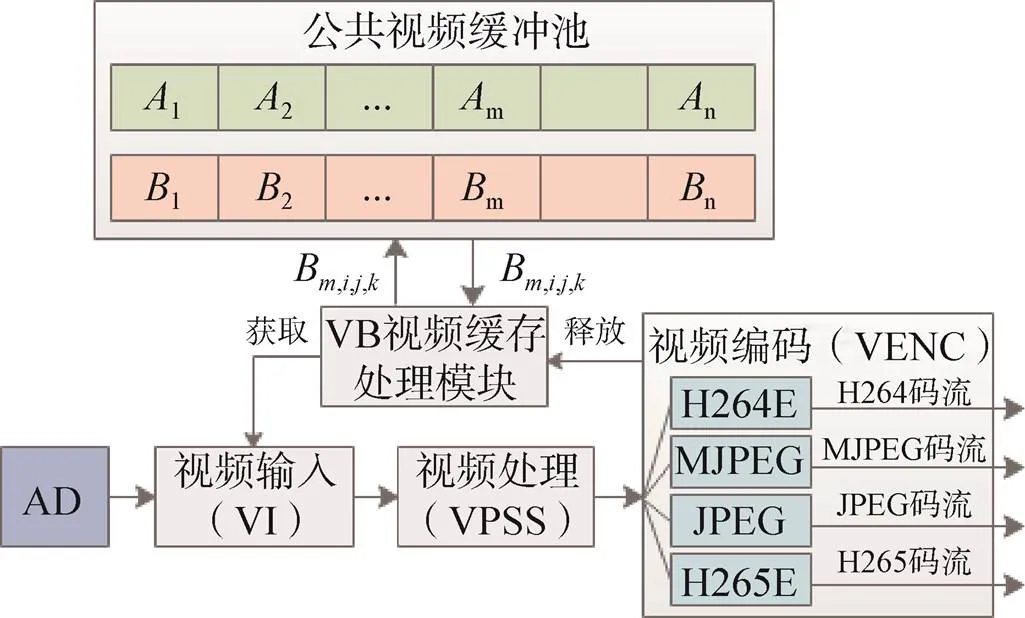
图6 视频处理流程
Fig. 6 The chart flow of video processing

图7 组网终端设计实物图
3 关键技术
3.1 异构网络通信
为降低传输时延,系统采用将卫星链路与区域组网融合为异构网络的通信模式,通过网关路由配置,实现协议栈网络层数据包快速传递。以返向遥测为例,从节点发起返向通信,首先由主节点配置默认网关,建立主从通道;同时,主节点请求卫通网关,获取卫通路由信息与地址转换服务,建立机-地内部网络通道;随后,返向遥测在主从节点间完成编码调制与解调译码过程,数据推送至卫通编码调制单元,经滤波、上变频、功率放大等信号处理过程,由动中通天线发送上星;经卫星变频转发,在信关站完成接收、解调、译码的基带数据还原,根据数据中心的路由配置信息,完成公网业务传输或二次上星转发;最终,由地面指控中心获取协议栈IP包并解析网络数据,获取从节点遥测数据。
异构通信网络架构如图8所示。应用层采用实时发布订阅协议RTPS(Real Time Publish Subscribe Protocol),用以提升系统容错、扩展、动态管理与模块设计等方面性能;传输层采用TCP加速与标准UDP协议,增强系统并发连接能力,减少传输延时,提高带宽利用率;网络层采用压缩包头的IP协议,以提升传输效率,满足网络动态寻址与路由转发功能。
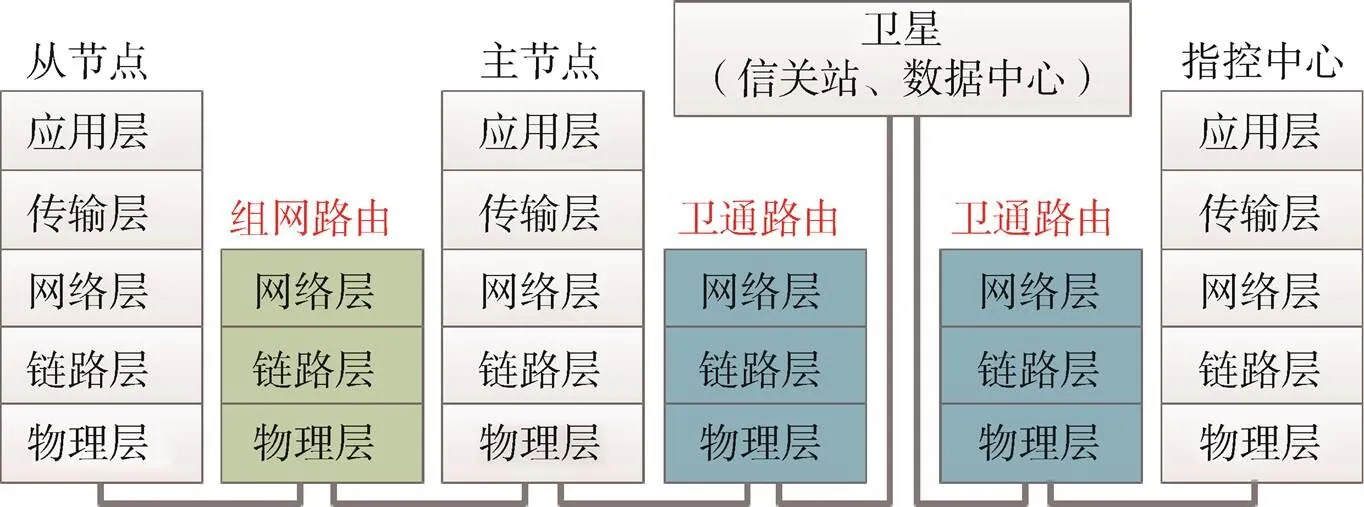
图8 异构通信网络架构
在信源数据组帧上,为降低协议开销,方案采用等长通用协议帧,以链路识别码、飞机/地面类型编码、设备编号区分响应终端,根据类型传输优先级,确认组帧、排队、缓存及调度传输规则。数据帧协议如图9所示,总长256 Byte,帧头14 Byte(含密钥区),有效数据负载区242 Byte,组帧效率约为94.5%,满足链路帧协议设计要求。
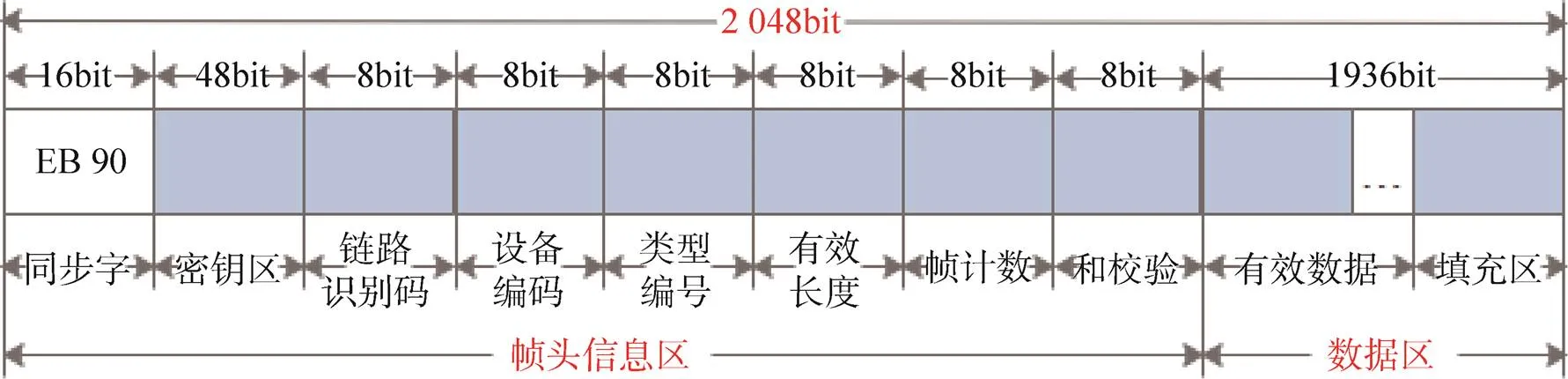
图9 数据帧协议
3.2 平滑低延时传输
系统采用多点任务机同步作业模式,在实现区域实时覆盖的同时,满足多任务协同分配。在有限带宽下,采用编码单元可变的H.265压缩算法,相比于H.264宏块大小固定,可更好适应移动场景变化,以场景信息驱使动态编码,在高效还原图像质量情况下,有效降低编码速率。然而实际作业场景变化不定,在编码高复杂、高动态图像场景时,易出现编码I帧“瞬时速率过冲”问题,致使缓存溢出或延时累加,图像显示花屏或卡顿。为解决该问题,系统使用P帧帧内刷新I Slice方法,将大码率I帧二次编码为低码率P帧,在保证图像质量情况下,有效缩减I/P帧大小差异,提升传输流畅性。同时,系统采用环状队列存储与码匀传输机制,以接口缓存能力与视频编码间隙匹配环状存储大小,以高优先级实时调度实现码匀传输,有效解决瞬时速率洪峰,避免缓存溢出,保证了低码率、高画质、高流畅度的视频传输过程,软件处理过程如图10所示。
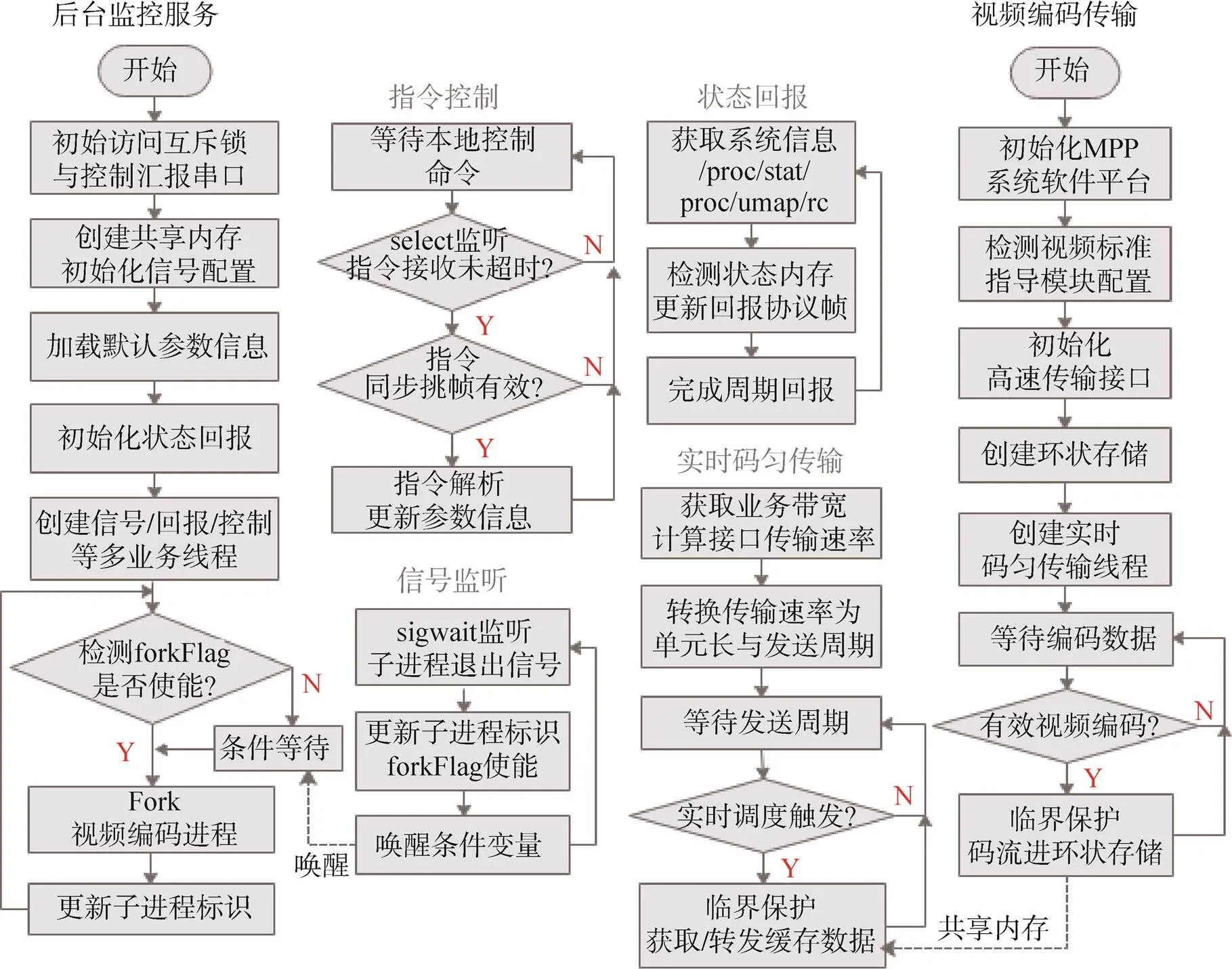
图10 视频编码传输软件处理过程
以4 Mb/s视频编码为例,在恒定比特率CBR (Constant Bit Rate)模式下,通过相同的视频场景输入,对比码匀传输前后的接口速率差异。为直观显示,测试采用UDP组播转发编码视频流方式,利用Wireshark软件抓包,绘制数据IO图表。经测试,码匀机制有效实现速率均化,保证数据流平滑传输过程,结果如图11所示。
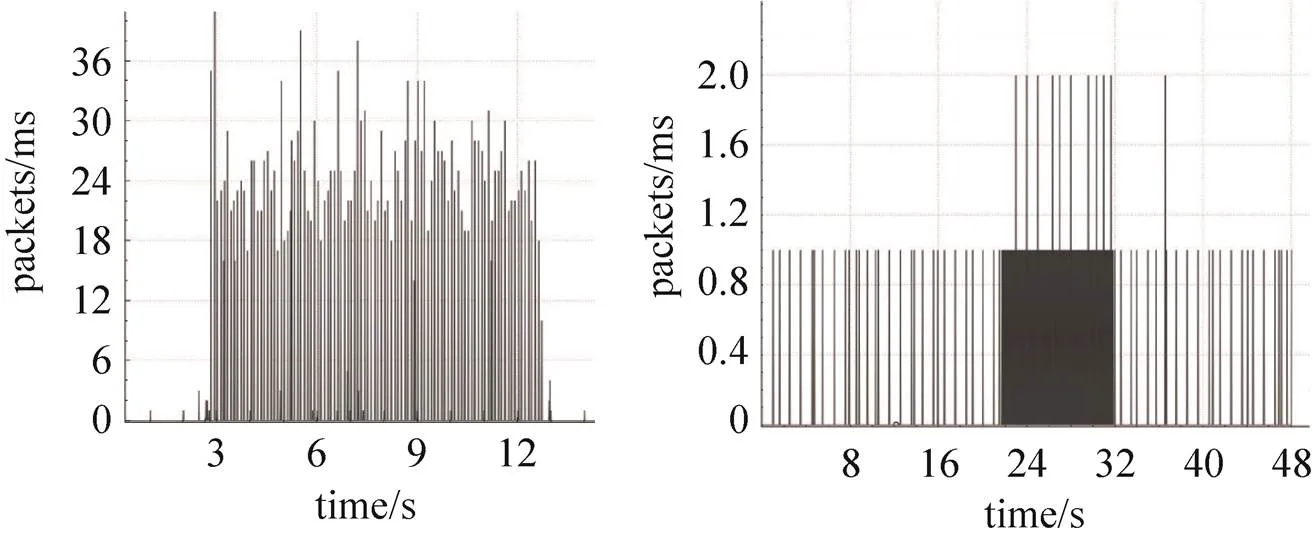
图11 码匀传输前(左)/后(右)IO图表对比结果
3.3 信源加密
无线信号易被捕获破译,特别是卫星通信与公网传输,飞行数据面临外泄风险。在信号编码调制前增加信源加密,以密态开展业务传输,有效提升系统安全性。故系统方案采用高级加密标准AES (Advanced Encryption Standard)算法的信源加密方式,基于复杂密码反馈CFB (Cipher FeedBack)或输出反馈OFB (Output FeedBack)流处理工作模式,初始向量为128 bit,密钥为256 bit,s位因需调整。在进行单帧数据加密时,以本地真随机数据配对密钥库地址,通过加载密钥库中Ⅳ与Key的随机组合,完成协议帧数据区加密;同时,更新协议帧密钥区地址信息,保证解密端密钥匹配与信息安全。以CFB模式加密为例,实现过程如图12所示。
使用遥控/遥测自收发软件,模拟256 kb/s上行遥控指令,于链路前后两端模拟数据收发,通过帧同步、CRC校验、数据匹配及计数累加计算,确认单帧数据的链路传输时延。经测试,在链路明密态模式下分别传输10万帧业务数据,密态较明态平均传输时延累加小于0.5 ms,与链路整体传输时延相比,可忽略不计,对比结果如图13所示。
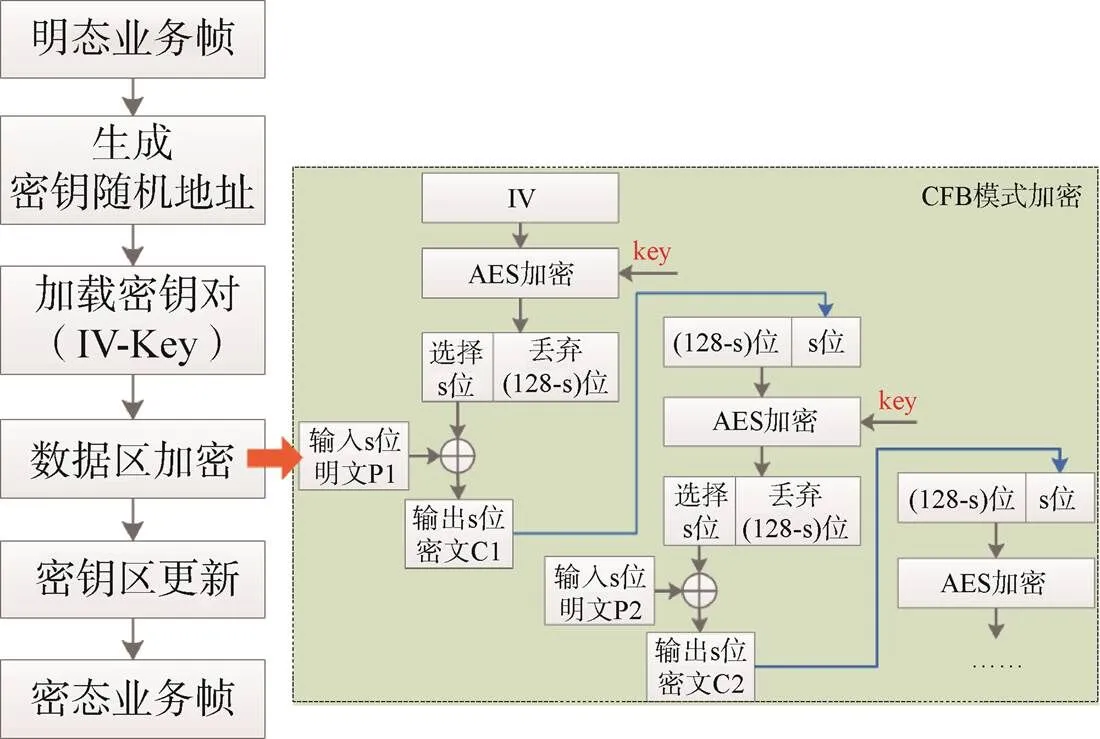
图12 AES算法CFB模式数据加密过程
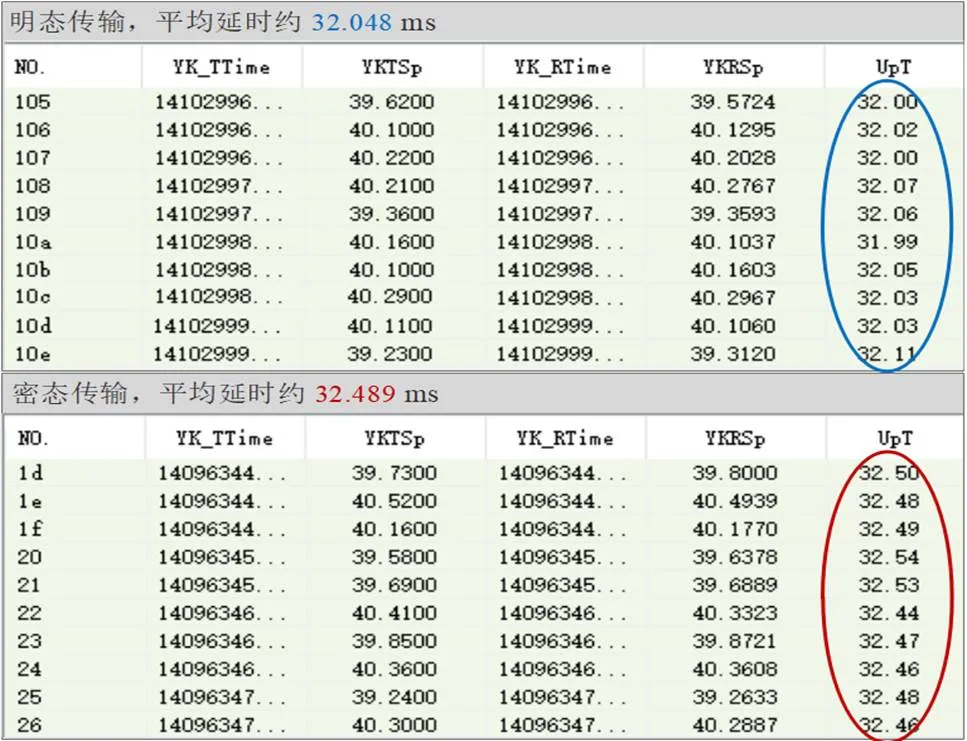
图13 明密态传输平均延时对比结果
4 链路测算与飞行试验
4.1 链路余量计算
通信系统由卫通链路与组网链路组成。其中,区域组网为视距通信,终端采用1W功放与双天线搭配模式,支持自动功率控制、多时隙分配、信道容量共享等功能,在锁定主-从单支链前返向额定速率256 kb/s与2 Mb/s情况下,具备实测20 km有效传输距离。而卫通链路涉及天线功放增益、传输衰减、噪声干扰、EIRP及G/T等参数,相比于视距链路,传输过程与参考取值更为复杂,故系统重点讨论卫星通信链路性能。
根据系统方案设计,机-地间卫星链路前返向额定带宽分别为2 Mb/s与8 Mb/s,机载终端采用等效口径0.45 m动中通天线与20 W功放组合模式,文献[10,11]提出的链路余量计算指标与雨衰估值方法,计算飞机与信关站间前向和返向链路余量分别为11.72 dB与5.69 dB,其中前向链路余量约为返向链路余量的2倍,可有效保证无人机飞行安全,满足设计要求。卫星链路余量计算过程如图14所示。
4.2 信道容量测试
根据任务设定与业务需求,划分各区间链路双向传输带宽,依照实际应用模式,搭建“一主四从”信道容量测试系统。使用Iperf网络测试软件,在各区间链路搭建服务器-客户端通信模型,通过标准UDP单播协议,以1 024 Byte单包长与信道设定带宽最大速率,开展双向数据包收发测试,持续时间60 min。经测试,各区间链路信息传输速率符合信道带宽设定,测试时间内无丢帧误码情况,系统设计满足实际应用需求,信道容量测试结果见表3。
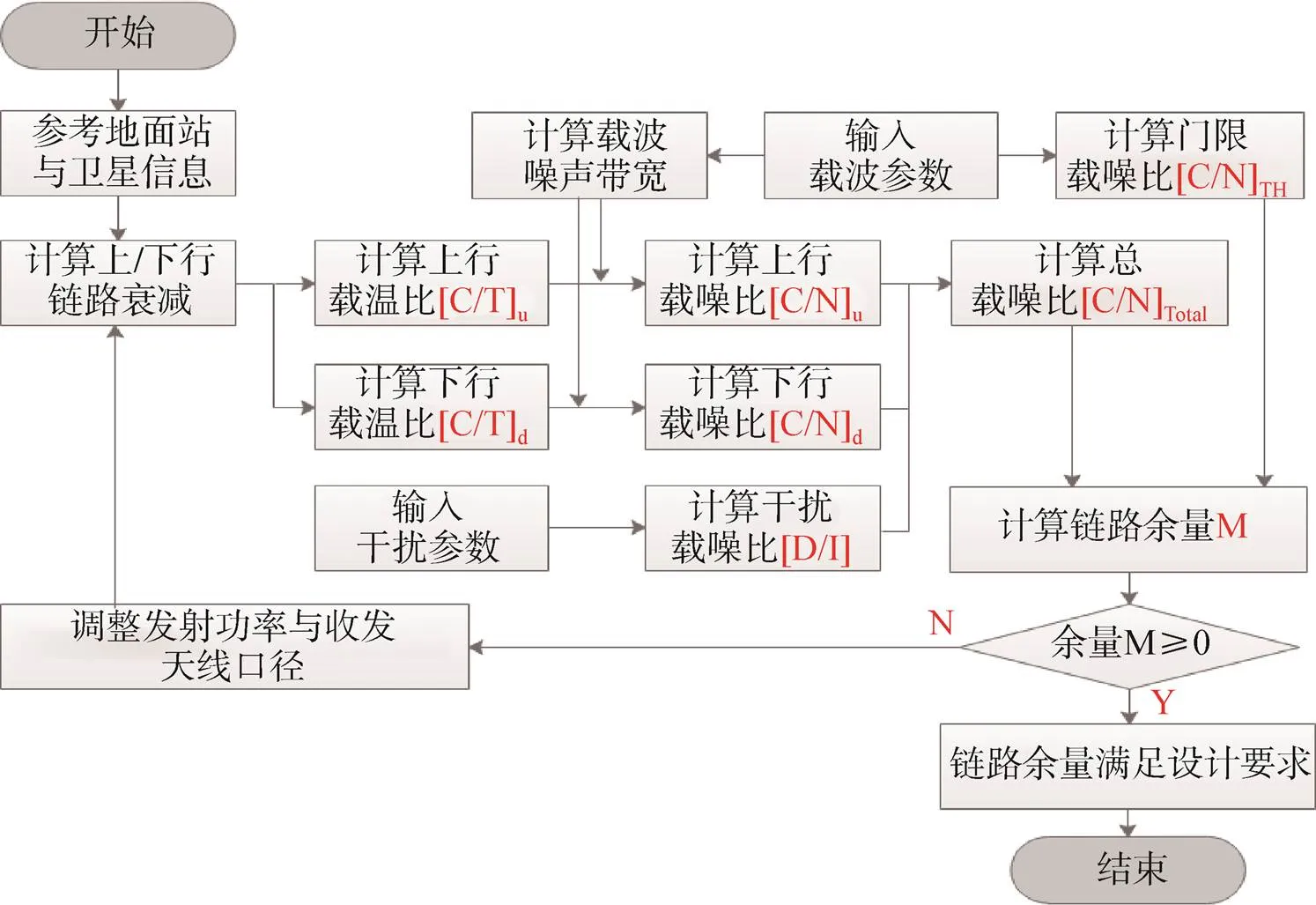
图14 卫星链路余量计算过程

表3 信道容量测试结果
4.3 传输时延测试
沿用上述测试系统,使用ping指令测试各终端间空口传输时延(往返)。其中,卫星链路采用端到端双跳传输模式,区域组网各分支链路前返向带宽配置相同,测试结果如表4所示。经测试,各级链路时延符合理论估算范围,两级链路时延和与系统首末端时延测试结果相近,确认系统时延测试准确有效。

表4 链路时延测试结果
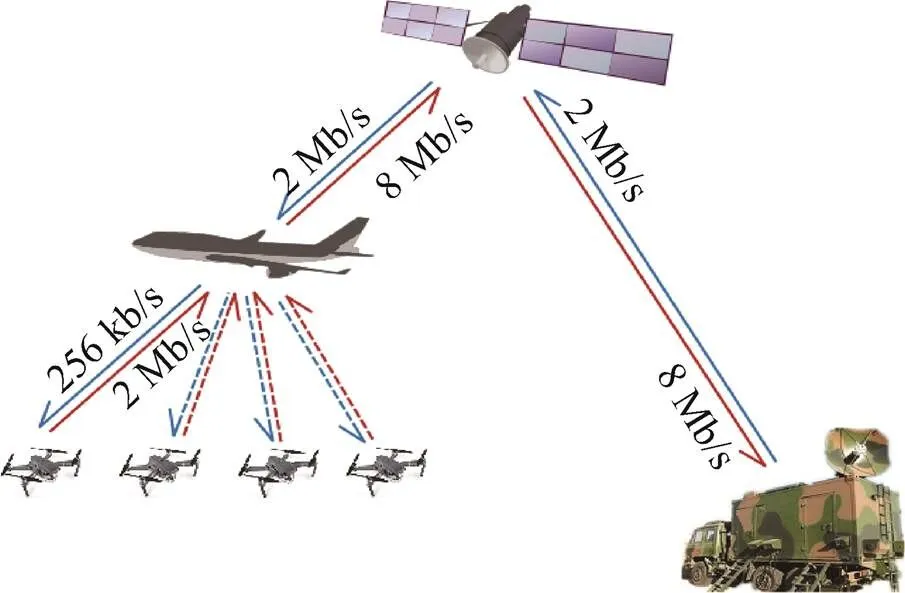
图15 飞行试验框架结构
4.4 飞行验证
针对实际应用模式,开展方案系统挂飞试验,框架结构组成如图15所示。使用一架大型固定翼无人机作为平台作业机,搭载Ka频段高通量卫通终端,通过内置总线接口单元,与机腹内组网终端设备(中心节点)开展实时信息交互;选用四架多旋翼垂起无人机作为从节点任务机,搭载高清光电吊舱,开展区域任务作业;地面指控中心由移动方舱车与外接1.2 m抛面天线构成,通过舱内链路监控软件,实现全链路系统测控与实时业务处理。在开展飞行试验时,首先由地面指控车控制平台无人机飞行至作业区域,切断视距链路,改用高通量卫通链路;旋翼无人机已先于作业区域布站上电等待,当收到组网终端遥控信号后,多架从节点任务机开始同步升空作业;光电吊舱捕获区域场景信息,以协议帧方式,经组网与卫星两级链路传输,发送至地面指控中心,完成实时解码显示。
经测试,地面指控中心与平台作业机、区域任务机双向通信正常,系统任意终端节点测控有效,四路从节点同步回传1 080 P@60 Hz的编码视频图像流畅无卡顿,确认方案设计合理可行。试验过程记录如图16所示。

图16 地面数据接收与任务机回传航拍截图
5 结束语
链路融合技术是当前无人机系统升级的重要方向,本文设计了一款集高通量卫星通信与区域星型组网于一体的无人机载通信系统。两级链路搭建异构通信网络,通过卫星通信,延伸集群作业半径;通过任务分配与多机协同,弥补单机作业缺陷,提升系统临场机动与战时协同的应用生存能力,为无人机超视距、高时效、同步覆盖作业提供了一种可行方案。本文通过方案介绍与关键技术说明,阐述了系统特点与技术优势,经过链路测算与多次飞行试验,确认系统方案设计满足超视距集群测控通信需求,具备实际工程化应用前景。
[1] 施洪平, 李志宇, 徐义华. 基于蓝牙和数传模块的小型四旋翼无人机通信系统设计[J]. 电子设计工程, 2016, 24(16): 81–84, 89.
SHI Hongping, LI Zhiyu, XU Yihua. The communication system of small quadrotor UAV based on bluetooth anddigital radio[J]. Electronic Design Engineering, 2016, 24(16): 81–84, 89.
[2] 钟剑峰, 王红军. 基于5G和无人机智能组网的应急通信技术[J]. 电讯技术, 2020, 60(11): 1290–1296.
ZHONG Jianfeng, WANG Hongjun. Emergency communication technology based on 5G and drone intelligent networking[J]. Telecommunication Engineering, 2020, 60(11): 1290–1296.
[3] 杨晨. 无人机中继测控数据链设计[J]. 现代电子技术, 2020, 43 (14): 109–113.
YANG Chen. Design of relay telemetry and control data link for UAV[J]. Modern Electronics Technique, 2020, 43(14): 109–113.
[4] 律会丽, 李平敏. 无人机接力测控数据链设计[J]. 电讯技术, 2021, 61(8): 939–944.
LYU Huili, LI Pingmin. Design of relay TT&C system of UAV[J]. Telecommunication Engineering, 2021, 61(8): 939–944.
[5] 王乐, 吴平, 胡秘. 一种无人机载超视距通信系统[J]. 电讯技术, 2019, 59(12): 1391–1397.
WANG Le, WU Ping, HU Mi. A UAV-borne over-the-horizon communication system[J]. Telecommunication Engineering. 2019, 59(12): 1391–1397.
[6] 刘芳, 高雪飞, 胡立章, 等. 一种基于无线自组网和卫星网混合组网的电力应急异构通信系统[J]. 河北电力技术. 2018, 37(6): 30–33.
LIU Fang, GAO Xuefei, HU Lizhang, et al. A power emergency heterogeneous communication system based on MANET and Satellite Network[J]. HeBei Electric Power, 2018, 37(6): 30–33.
[7] 陈侠, 刘永泰. 多UAV攻击移动目标的协同任务分配与航迹规划[J]. 火力与指挥控制, 2020, 45(9): 35–40, 46.
CHEN Xia, LIU Yongtai. Cooperative task assignment and track planning for multi-UAV attack mobile targets[J]. Fire Control & Command Control, 2020, 45(9): 35–40, 46.
[8] 孙伟, 邢斯瑞, 易进, 等. 基于卫星测控链路的卫星数据传输动态调整技术[J]. 测试技术学报, 2021, 35(3): 272–276.
SUN Wei, XING Sirui, YI Jin, et al. A dynamic adjust technology of satellite data transmission based on satellite TT&C link[J]. Journal of Test and Measurement Technology, 2021, 35(3): 272–276.
[9] 闫朝星, 王先朋, 罗翔, 等. 天基信息网中飞行器集群分集接入技术[J]. 遥测遥控, 2019, 40(2): 1–8.
YAN Chaoxing, WANG Xianpeng, LUO Xiang, et al. Diversity slotted random access techniques for aircraft clusters in space-based information network[J]. Journal of Telemetry, Tracking and Command, 2019, 40(2): 1–8.
[10] 户凌志, 张海勇, 贺寅. 卫星通信链路计算方法研究[J]. 舰船电子工程, 2019, 39(11): 72–75.
HU Lingzhi, ZHANG Haiyong, HE Yin. Research on the calculation method of satellite communication link[J]. Ship Electronic Engineering, 2019, 39(11): 72–75.
[11] 刘杉, 江卫民, 文郑杰, 等. Ka频段卫星动中通链路雨衰预测与对策分析[J]. 无线电工程, 2021,51(4): 259–263.
LIU Shan, JIANG Weimin, WEN Zhengjie, et al. Rain attenuation prediction and countermeasures analysis for Ka-band SOTM link[J]. Radio Engineering, 2021,51(4): 259–263.
A design of UAV-borne communication system of non-line-of-sight networking
ZHANG Jie1,2, YANG Chen1, LIU Xue1
(1. Tianjin Zhong Wei Aerospace Data System Technology Co., Ltd, Tianjin 300458, China;2. Tianjin Key Laboratory of Intelligent Information Processing in Remote Sensing, Tianjin 300458, China)
Aiming at the requirements of non-line-of-sight (NLOS) controlling multiple UAVs working in clusters, it was proposed to combine the Ka-band high-throughput satellite technology with the TD-LTE protocol zone networking technology to build a “1+N” architecture of UAV-borne telemetry, tracking and command (TT&C) system. Through the introduction of the scheme, the design ideas, scheme selections and physical design results of modules such as satellites, networking, and payloads were explained, and the characteristics of the core units were clarified. The key technologies such as heterogeneous network communication, smooth low-latency transmission, source encryption were expanded. The link budget, bandwidth delay test, and flight test were completed. The results showed that either direction TT&C between any terminals in the system was robustness and the design was reasonable and feasible. Compared with satellite and networking single-mode communication modes, the system had obvious advantages in long-range cluster measurement and controlling, task coordination, on-site maneuvering and cost. It provided practice reference for the subsequent construction of aerospace integrated multi-platform support communication system.
Unmanned aerial vehicle; NLOS networking; Heterogeneous network; Task collaborative; Cluster TT&C
V243.1
A
CN11-1780(2022)05-0001-10
10.12347/j.ycyk.20211230001
张捷, 杨晨, 刘学.一种超视距组网无人机载通信系统设计[J]. 遥测遥控, 2022, 43(5): 1–10.
DOI:10.12347/j.ycyk.20211230001
: ZHANG Jie, YANG Chen, LIU Xue. A design of UAV-borne communication system of non-line-of-sight networking[J]. Journal of Telemetry, Tracking and Command, 2022, 43(5): 1–10.
基金项目:国家重点研发计划项目(No. 2017YFC1404900);天津市科技计划项目(No. 19YDSSGX00320)
2021-12-30
2022-01-28
张 捷 1987年生,硕士,工程师,主要研究方向为无人机测控通信系统设计、卫星通信技术、视频图像处理。
杨 晨 1982年生,硕士,高级工程师,主要研究方向为无人机集群组网协议设计与通信体制设计。
刘 学 1986年生,硕士,工程师,主要研究方向为无人机测控通信系统设计。
(本文编辑:傅 杰)
