全空域多目标测控天线及其校正方法研究
2022-06-27韩明,李洪,任凯,王洋
韩 明,李 洪,任 凯,王 洋
(1. 北京宇航系统工程研究所,北京,100076;2. 中国航天科技集团有限公司,北京,100048)
0 引 言
随着中国航天事业的快速发展,飞行器种类和数量不断增加,航天器测控任务变得越来越繁琐,会出现同时对多个目标进行跟踪和测控的情况。传统测控手段是使用一个或多个测控站跟踪单个目标,通过增加地面测控站数量确保完成多目标跟踪任务,需消耗大量人力、物力成本,非多目标测控的最优解决方案。
单站全空域多目标测控是未来航天测控领域的重要发展方向。全空域指覆盖方位0~360°,俯仰0~90°空域,保证测控链路的最大化;多目标指同时对多个不同状态的目标进行测控,减少测控站数量。实现难度主要集中在测控天线上,由若干发射阵元和接收阵元组成的大型有源相控阵天线及其数字波束形成技术(Digital Beamforming,DBF)提供了可行的技术解决方案。另外,相控阵天线与传统抛物面天线校正的主要区别是增加通道一致性校正,校正方法是需要重点关注的问题。
美国空军最先进行了网格球顶相控阵天线(Geodesic Dome Phased Array Antenna,GDPAA)的研制,用以完成对4 颗卫星的同时测控任务,五边形及六边形子阵拼接构成GDPAA 有源相控阵,采用数字波束形成技术完成对全空域多目标的跟踪、遥测和遥控,信号接收和发射分别选定在S 和L 频段。随后,欧空局也研发了一种球面阵天线(Geodesic Dome Array Antenna,GEODA),用于接收星群遥测信号,天线工作在L 频段,可视范围为方位0~360°、俯仰5°~90°。中国开展了全空域多目标测控天线的相关研究,取得了一系列成果,但该技术尚未得到大规模工程应用。
本文针对全空域多目标测控需求,设计了一种基于球面加柱面的球面共形阵测控天线,并介绍了其波束形成原理,提出了通道一致性校正方法。
1 球面共形阵测控天线设计
根据需求和实现难度,设计球面共形阵测控天线实现多目标、全空域测控功能。
球面共形阵测控天线从功能角度上可划分为3 个相对独立的子系统,即天线射频子系统、波束形成与控制子系统、天线结构子系统,测控天线组成及基本工作原理如图1 所示。天线射频子系统由若干接收阵元、发射阵元和发射机/接收机(Transmitter and Receiver,T/R)组件组成,集成了传统设备的子系统、发射、接收的功能。波束形成与控制子系统用于完成发射波束和接收波束的形成与控制以及自跟踪。天线结构子系统主要由球面阵天线支撑架、天线背架、天线罩和散热设施等部分组成,主要用于支撑、容纳和保护阵元、组件和其他设备。
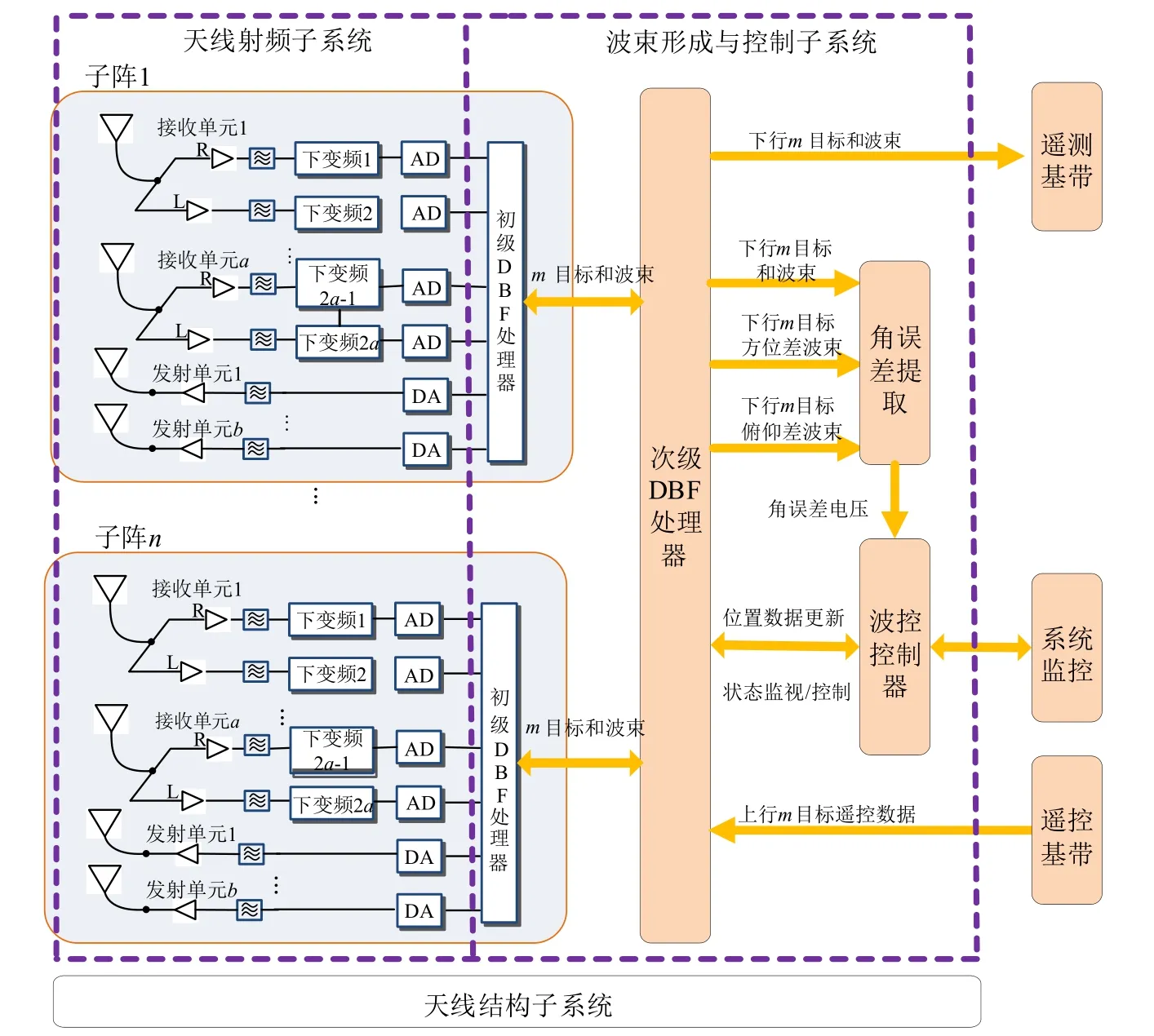
图1 球面共形阵测控天线组成及工作流程Fig.1 The Composition and Working Process of the Spherical Conformal Array TT&C Antenna
球面共形阵测控天线采用分级波束形成技术,阵元级的幅度相位加权在子阵中的初级DBF 处理器完成,后端次级DBF 处理器仅负责对子阵进行求和,初级和次级波束形成之间采用数字光传输技术。
对于接收链路,射频信号经过×个天线阵元接收进入射频前端,经过射频前端个子阵的R 组件滤波放大,经过一次变频后得到模拟中频信号。该模拟中频信号经过高速AD 采样得到数字信号,数字信号经过Serdes 后串行传输给后端子阵初级DBF 处理器。在每个子阵内初级DBF 处理器中实现个波束的初级DBF 形成,并经过电光转换成光信号,经过光纤传送至次级DBF 处理器;完成次级DBF 分级合成,形成个波束(包括和差波束)信号,并完成角误差电压提取送至波束控制器,同时次级DBF 处理器将和波束信号送至基带分系统完成遥测信号解调。波束控制器依据误差电压修正每个目标的当前位置,将目标的当前位置信息控制给DBF 形成设备,完成目标信号的跟踪。发射链路与接收链路类似,在此不再赘述。
球面共形阵测控天线工程样机实现如图2 所示。该工程样机为等效2 m 口径抛物面天线的球面共形阵测控天线,即该天线EIRP 值和G/T 值与直径为2 m的抛物面天线基本相同。
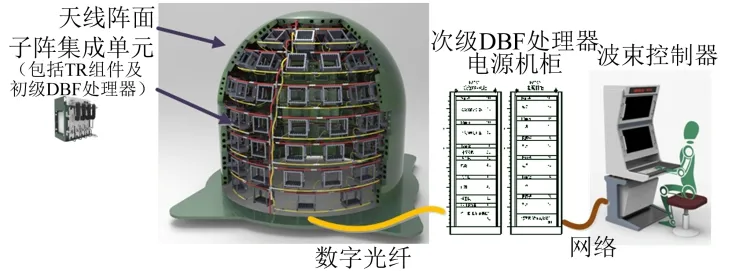
图2 球面共形阵测控天线工程样机实现Fig.2 The Engineering Prototype of the Spherical Conformal Phased-array TT&C Antenna
天线反射面是设计的重点,其上部为半球,下部为圆柱,方位方向旋转对称,在空间任意方向,天线口径均相同,波束扫描时的增益稳定、副瓣不升高,波束不展宽。同时,由于在低仰角时加入部分柱面阵元进行合成,补偿低仰角的增益损失,保证在全空域内跟踪目标时增益的波动较小,可解决传统抛物面天线俯仰角小于5°时的性能下降问题,俯仰角0°与5°具有相同的EIRP 值和G/T。考虑到天线反射面的加工、运输与安装,及反射面后端处理的特点,根据天线振子单元的总数量,天线反射面采取“西瓜瓣”划分方式,共划分8 圈、个子阵,如图3 所示,发射和接收阵元交叉排布。
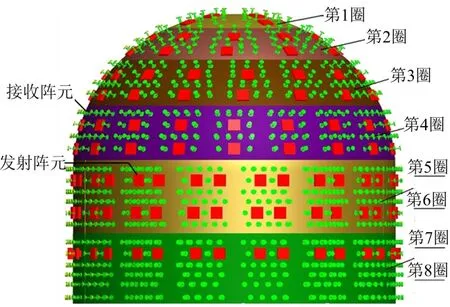
图3 天线射面结构Fig.3 The Structure Model of Antenna Reflector
2 SISO 算法优化
相控阵天线是将来自每一个天线单元的信号能量在期望点上同相相加,从而实现阵列能量的聚焦,这需要各阵元的相位加权系数。球面共形阵波束形成的具体原理如图4 所示。
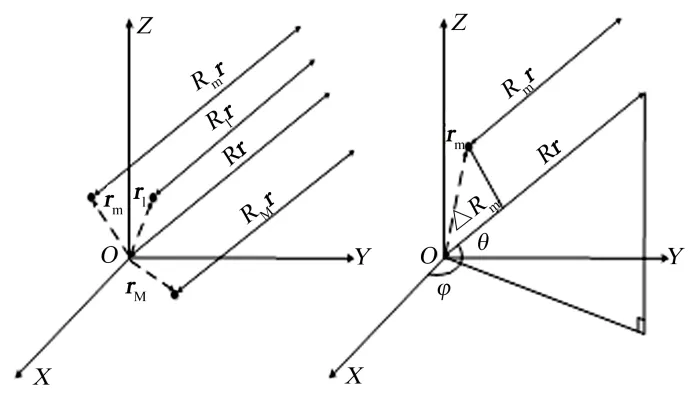
图4 数字波束形成原理Fig.4 The Principle of the Beamforming
设个阵列天线单元安装在某一曲面上,如图4所示。第个阵元在阵中相对于相位参考点的位置矢量为r=[x ,y ,z,它的电场强度辐射方向图为(ϕ,),此天线单元的幅度与相位加权系数分别为A和Φ,第个天线单元的复加权系数W为

则整个阵列所有天线单元在(, )方向上的方向图可以表示为

式中R =−Δ,为阵列相位参考点到远场目标的距离值, R为从第个天线阵元位置与相位参考点的距离值, Δ为二者之差。远场目标与相位参考点连 线 所 决 定 的 单 位 方 向 矢 量=[coscos,cossin,sin]。依照空间几何的关系可知Δ等于:

在远场时由于>>Δ,所以 R ≈,再利用 Δ的表达式可得:

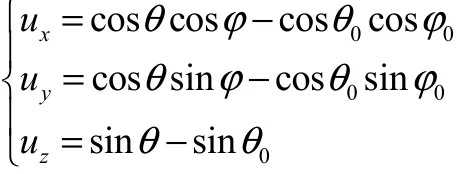
阵元相移值 Φ取决于在标称波束最大值方向上第个天线阵元与相位参考点的距离差。设标称波束最大值方向单位矢量等于:

则有:

将式(6)中求得 Φ代入(, )的表达式可得:

其中:
根据上述原理,基于球面加柱面的球面共形阵测控天线,以球心为参考点,建立直角坐标系和球坐标系,可到阵面每个阵元的三维坐标P=[x ,y ,z]。根据任务需要的目标指向(,),可利用式(6)计算出每个阵元的加权系数 Φ。若同时对个目标测控,可通过将每个单阵元的采样信号进行分路成路,每一路根据不同指向计算出的权值 Φ进行移相,后端将对应指向的信号流分别合成,形成个独立波束。
3 通道一致性校正方法
相控阵天线要求波束形成前各天线阵元间通道增益和相位严格一致,大型地面天线在研制阶段,需要在试验场进行远场通道一致性校正,方法主要有2 种,即对标校塔校正和无人机校正。全空域多目标测控天线由于阵元数量大,功能复杂,在实际校正过程中,可先用无人机进行粗校,然后用对塔方向的通道一致性校准值去对无人机获得的通道一致性校正值进行修正。
3.1 标校塔校正
接收通道和发射通道校正原理如图5 所示。
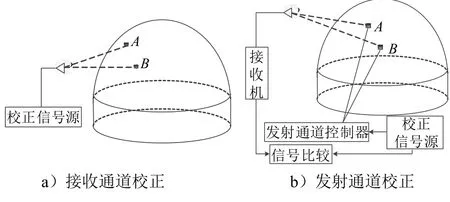
图5 标校塔通道一致性校正Fig.5 The Channel Consistency Calibration for Tower
a)接收通道。
采用差分GPS 确定标校天线的位置,根据球面阵天线球心的位置计算得到标校天线在球面阵天线坐标系中的位置,标校天线发射标校信号,阵元与标校天线的距离为,接收到的信号记为x ();阵元与标校天线的距离为,接收到的信号记为x ()。
由于空间路程不同导致的幅度差记为 Δ,相位差记为 Δ,阵元和阵元相对于标校天线的角度不同导致的幅度差记为ΔP,相位差记为 Δ。
通过比较x )和x (),可以得到二者的幅度差Δ和相位差Δ,则阵元与阵元接收通道的幅度差Δ和相位差Δ为
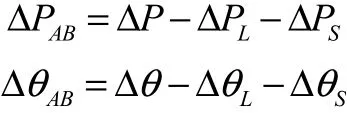
获取到ΔP和Δθ后即可对相应阵元进行调节,完成接收通道校正。
b)发射通道。
发射通道控制器对标校通道进行控制,依次选择标校通道。当所选择通道为阵元时,标校信号经过发射通道控制器和阵元,通过阵元发射,标校天线接收发射的标校信号,经过接收机放大、变频后到达信号比较器,和标校信号进行比较,再采用与接收通道校正中的类似方法扣除空间距离差和相对于标校天线角度差导致的幅度和相位偏差后,得到阵元相对于标校信号的幅度特征 P和相位特征。然后依次选择其他的通道,最终可以得到全部阵元通道的幅度特征P (= 1,2,… ,)和相位特征 (= 1,2,… ,),其中为通道序号,为阵元数目。之后进行幅度和相位调整,完成发射通道校正。
3.2 无人机校正
无人机通道一致性校正需要的标校设备如表1 所示,云台用于安装标校天线和信标机,地面可以远程控制云台方位、俯仰方向转动,在摄像头的配合下,实现快速对准阵列天线。

表1 无人机通道一致性校正设备Tab.1 The Equipment of the Channel Consistency Calibration for Unmanned Aerial Vehicle
云台通过结构件采用下沉式安装在无人机的下方,可以有效地减少无人机机体对天线的多径干扰。差分GPS 包括无人机上搭载的差分GPS 设备以及地面差分GPS 基准站。
以等效2 m 口径抛物面天线的球面共形阵天线为例,无人机校正前,以被测天线为中心,根据被测天线的远场距离和无人机飞行特性制定合适的飞行半径和飞行高度。从相控阵距地面1 m 起,每间隔2 m 为一个飞行圈次,共3 个圈次,每个圈次方位0°起,每间隔30°为一个测试悬停点,共36 个测试点位,可以涵盖所有通道。无人机幅相一致性校准工作原理如图6 所示。

图6 无人机通道一致性校正Fig.6 The Channel Consistency Calibration for Unmanned Aerial Vehicle
无人机上搭载的差分GPS,用以精确获得无人机各时刻相对各振子的空间位置。对无人机进行各通道一致性测量并扣除理论空间幅度、相位值后,得到各通道幅相一致性系数,完成测控天线通道一致性校正。
3.3 校正试验验证
在使用无人机进行粗校后,在距离球面共形阵测控天线原理样机300 m 的标校塔上放置校正信号源,对天线的通道一致性进行校正。为了验证校正方案的可行性,主要对较正的稳定性和校正后的系统性能进行了试验。校正试验主要内容为:
a)标校天线发射频率为2250 MHz 的标校信号,相控阵天线接收到标校信号后计算各个通道相对于标校信号源的相位,在一天内间隔3 h 进行多次标校,对前后两次试验得到的通道相位进行差分运算,统计各通道相位差;
b)通道标校完成之后,利用标校结果对通道一致性进行修正,然后绘制天线方向图,如图7 所示;
c)对卫星、无人机进行动态跟踪,验证校正效果。
试验结果为:
a)比较多次标校所得到的通道相位,其差值分布在±4°内,远场标校结果稳定,可进行通道一致性修正;
b)利用标校结果对通道一致性进行修正,绘制的天线方向图正常,如图7,副瓣为-14.75 dB(要求为小于-13 dB);

图7 某方向标校后的天线方向图Fig.7 The Antenna Pattern in a Certain Direction after the Calibration
c)同时对多个卫星、无人机进行动态跟踪,跟踪过程稳定,程序引导和自跟踪工作正常。
4 结束语
随着航天高密度发射和在轨飞行器数量不断增加,全空域多目标测控已成为航天测控领域亟待解决的技术难题,集成了大量发射阵元和接收阵元的一体化大型相控阵天线是完成全空域多目标测控的有效途径。本文设计了基于球面加柱面的球面共形阵测控天线,研制了工程样机,并对其远场通道一致性校正技术进行了探讨和试验验证,在工程应用上具有一定的参考价值。目前球面共形阵测控天线成本较高,低成本高可靠的相控阵技术将是未来重要的研究方向。