面向水声传感网的自主水下航行器辅助定位动态路径规划
2022-06-25黄沛烁王易因关新平黄梦醒
黄沛烁 王易因 关新平 黄梦醒
①(海南大学信息与通信工程学院 海口 570228)
②(上海交通大学自动化系 上海 200240)
③(系统控制与信息处理教育部重点实验室 上海 200240)
1 引言
水声传感器网络(Underwater Acoustic Sensor Networks, UASNs)在海洋资源勘探、海洋生态保护、军事领域均有着重要应用。UASNs节点布放之后受洋流作用很可能会出现位置偏移,故需要进行位置修正,位置修正实质上也是对UASNs节点定位。不论UASNs还是无线传感器网络(Wireless Sensor Network, WSNs),都需要位置信息赋予数据意义。在WSNs的移动锚点辅助定位的路径规划方面已有一些研究成果如文献[1-6],对UASNs移动锚点辅助定位具有重要借鉴意义。在UASNs传感器节点定位时可使用自主式水下潜器(Autonomous Underwater Vehicle, AUV)充当移动锚点进行辅助定位。水下环境特点使得UASNs定位有3个突出问题:时钟异步、分层效应、传感器节点移动。面对UASNs定位问题,已有学者就AUV辅助UASNs定位问题取得部分研究成果如文献[7-11]等,而对于AUV路径规划研究较少。现有AUV辅助UASNs节点定位的路径规划方案以静态路径规划为主,如栅格轨迹、螺旋轨迹[7]、基于区域确定的移动锚点定位算法(Localization algorithm assisted by Mobile anchor node and based on Region Determination,LMRD)[12]。同时,部分WSNs移动锚节点辅助定位的静态路径规划方案被广泛应用于A U V辅助UASNs节点定位中,如扫描算法(Scan)、复合扫描(Double-Scan)、希伯尔特算法(Hilbert)[2]、基于三边测量的移动锚点定位算法(Localization algorithm with a Mobile Anchor node based on Trilateration, LMAT)[13]等。由于AUV能量受限,当UASNs监视区域过大时使用静态路径规划,AUV能量将难以兼顾定位精度与定位率。AUV辅助定位中AUV路径影响UASNs节点定位的精度[14],其定位误差的方差与几何精度因子成正比,而几何精度因子取决于目标传感器的位置和移动锚点路径[15]。由于UASNs节点的位置未知,使得难以规划出理想几何精度因子的路径。另外,定位率受锚点密度与覆盖范围影响,提高锚点密度和覆盖范围必增加AUV的能量损耗。
使用AUV对UASNs进行数据收集同样受严格的能量约束[16]。针对能量约束问题,有学者对UASNs数据收集的AUV路径规划做出研究如文献[17-19]。这对于UASNs中AUV辅助定位的路径规划同样具有重要借鉴意义。但对UASNs进行数据收集的路径规划与AUV辅助定位的路径规划又存在以下区别:(1)访问次数不同。收集所有UASNs传感器节点的数据,只需对所有传感器节点访问1次,即在路径规划中只要AUV出现在每个传感器节点通信范围内1次。AUV辅助定位中需要多次访问每个传感器节点。意味着,路径规划中每个传感器节点通信范围内AUV出现多次,提高了路径规划的难度。(2)是否已知传感器节点位置不同。一些关于UASNs数据收集的路径规划算法是基于已知传感器节点位置。而在AUV辅助定位算法中,在路径规划之前并不知道传感器节点位置,提升了路径规划的难度。
面对上述问题,本文从信息熵的角度提出一种面向UASNs的AUV动态路径规划方法。信息能减少不确定性[20]。在UASNs传感器节点定位场景中,本文将定位过程视为通过获得信息增益,减少传感器节点位置信息不确定性的过程。为方便对传感器节点位置信息记录和位置信息不确定性量化,将监视区域划分为多个相同大小方块。在路径规划时为了提高能量利用率,本文采用贪婪算法:选择待选位置中期望信息增益与AUV能量损耗比值最大的位置作为AUV目标位置。最后,通过仿真验证了本文方法的有效性。
2 动态路径规划基础
本节主要介绍本文方法涉及的基本定义、从信息熵的角度对UASNs中的传感器节点定位过程进行简要分析。AUV辅助UASNs节点进行位置修正如图1所示,由AUV在监视区域对应的水域广播自身的位置信息辅助UASNs节点进行定位。在通信范围内的UASNs节点接收信息,并反馈至AUV。
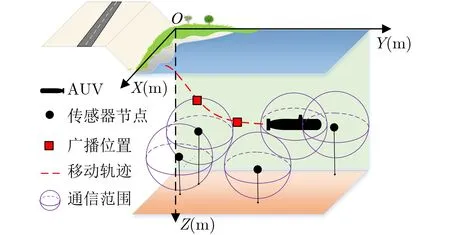
图1 AUV辅助定位
2.1 基本定义
定义1 监测区域A为一块长宽高都为L的正方体区域,本文将监测区域A划分为多个单位方块,每个方块长宽高均为l。从零点开始依次从X,Y,Z3个坐标轴数值增加的方向对单位方块进行编号,该编号为方块唯一编号,方块表示为ak,k为方块编号。通过方块编号和监视区域A的长宽高可以计算出方块的位置。A为单元方块的集合,其中包括了K个单位方块,故A可以表示为A= {a1,a2,...,aK} 。其 中ak=[xk,yk,zk]T的xk,yk,zk分别表示方块ak的中心位置在X,Y,Z3个坐标轴上的坐标。
定义2 感器节点V t= {v1t,v2t,...,vNt},其中,V t表示进行第t次位置信息更新之后所有传感器节点的位置信息;vit={fit,Sit}表 示第t次位置信息更新之后传感器节点i的定位信息,fit表示节点i定位状态,取值为0, 1,分别表示未定位和已定位;Sit表示传感器节点i进 行第t次更新之后可能位于的方块集合,在下文称为位置信息;N为布置传感器节点个数。此外,传感器节点i的真实位置记为pi=[xi,yi,zi]T, 其中xi,yi,zi分别表示传感器节点i在X,Y,Z3个坐标轴上的坐标。
2.2 位置修正过程


3 面向水声传感网定位的AUV动态路径规划
本文方法定位和路径规划过程流程如图2所示,AUV根据传感器节点的位置信息进行动态路径规划和定位,直至所有传感器节点完成位置修正。由于传感器节点位置估计并非本文研究重点,故将传感器节点位置的X,Y坐标值估计为其位置信息对应多边形的中心位置坐标值,Z坐标轴上深度信息为已知量。

图2 水下传感器节点位置修正
3.1 传感器节点定位

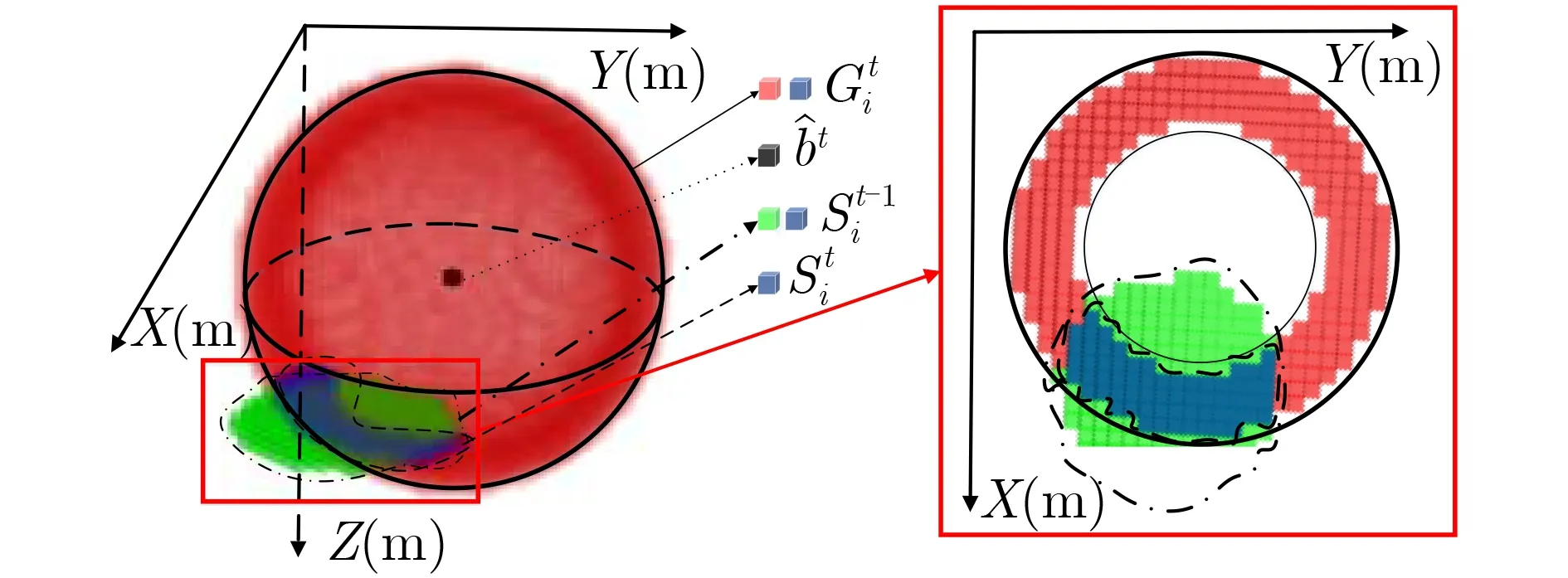
图3 使用交集定位
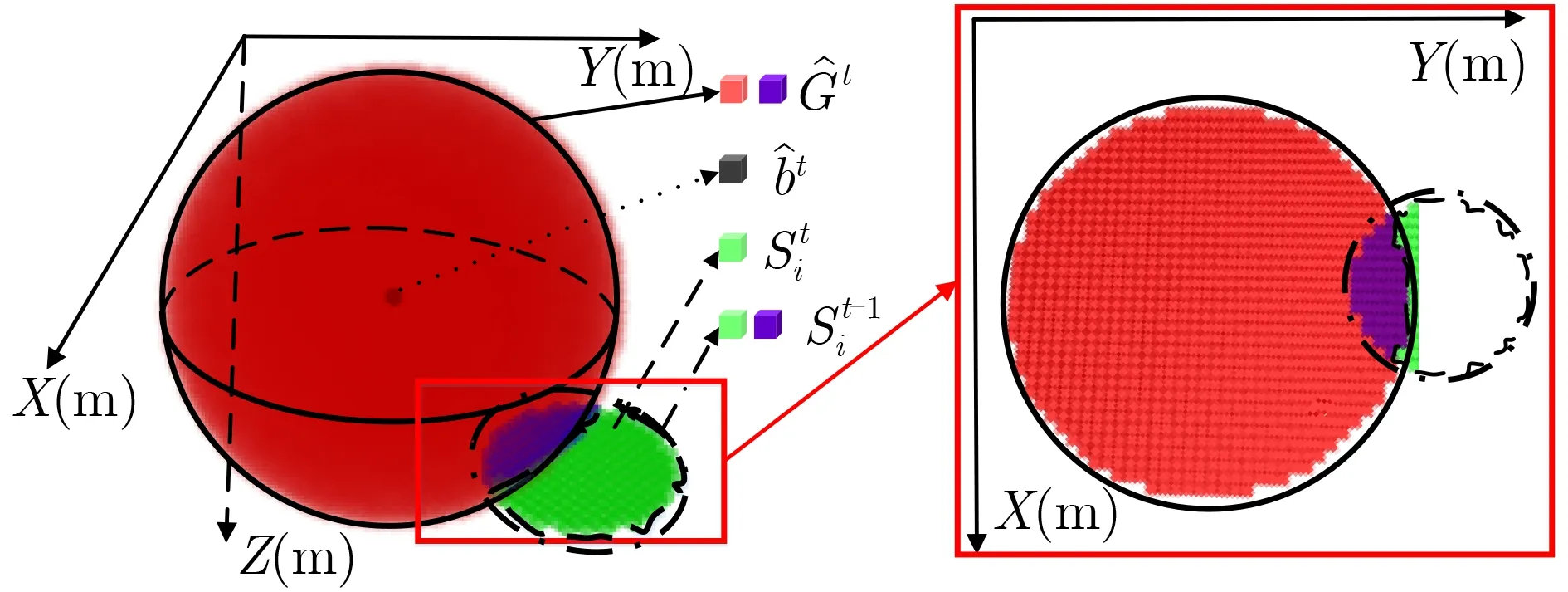
图4 使用差集定位
3.2 AUV路径规划

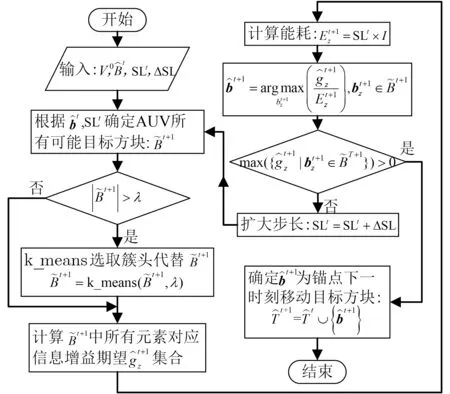
图5 动态路径规划
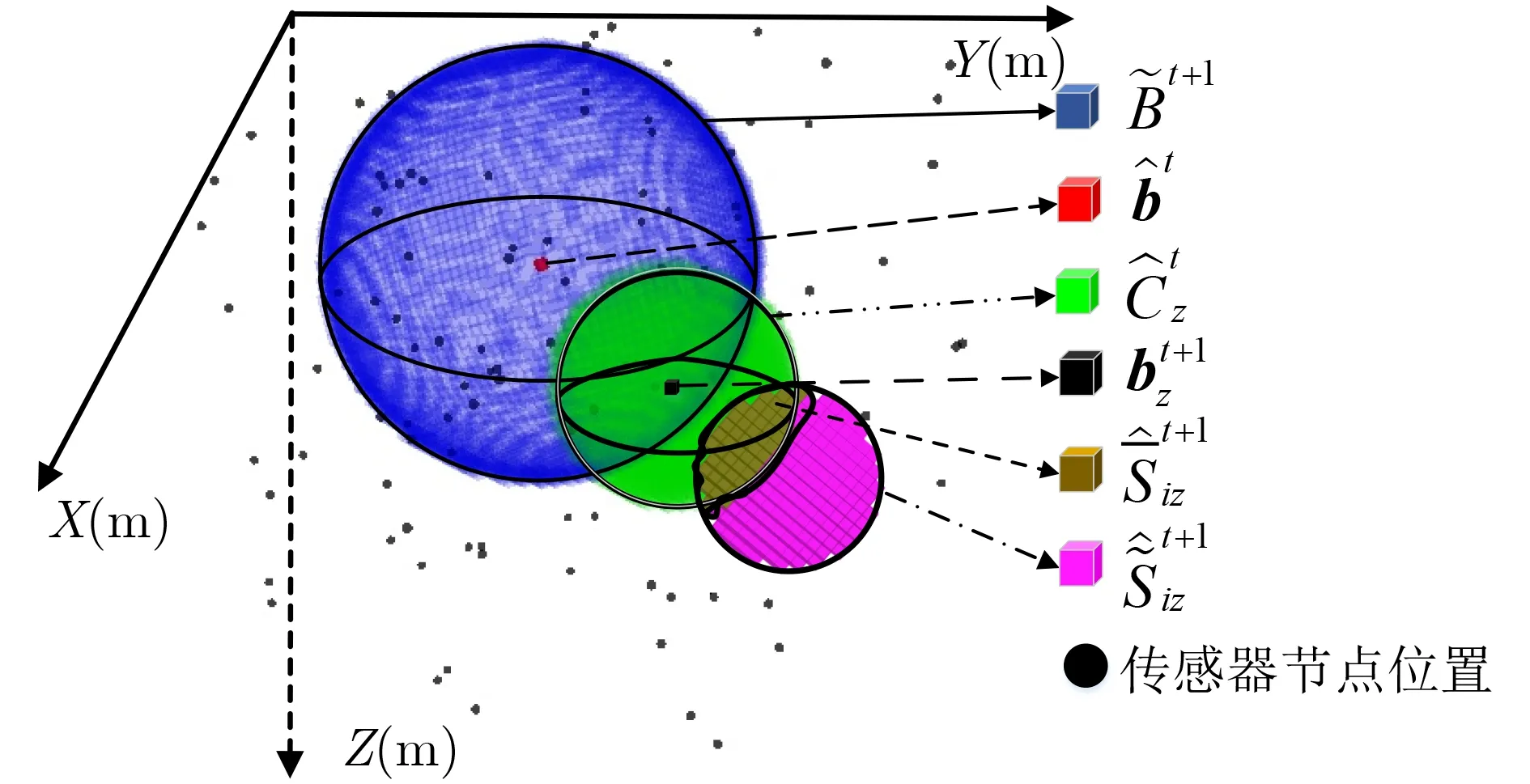
图6 路径规划示意图


本文方法通过循环执行3.1节的定位和3.2节的路径规划直至完成传感网络节点的定位。
4 仿真实验


首先,在仿真实验了本文方法在同一噪声ε= 1,δ= 2不 同阈值β取值下的表现,并与SLMAT算法进行对比,仿真结果如图7所示。在图7中,本文方法在蒙特卡罗仿真中规划路径长度方面优于SLMAT算法;在定位精度方面能否优于SLMAT算法受β取值影响,β取值越大定位误差越大。由2.2节可知,Lβ取值随着β取值增加而增加。Lβ增加就降低了判断是否完成位置修正的标准,故导致位置估计误差增加,与此同时也减少了需要的虚拟锚点个数和规划路径长度。由图7可看出,同时从定位误差分布、规划路径长度和平均虚拟锚点个数多个方面看,在β= 4时本文方法表现与SLMAT最接近。故下文分析在β= 4,不同噪声条件下本文方法的表现,并与SLMAT和MBL(ndc)算法进行对比。由表1可以看到MBL(ndc)算法定位误差是本文方法和SLMAT算法的数倍,故在图8(a)、图9(a)、图9(c)不做展示。同样地,由于SLMAT算法规划的路径长度与噪声无关,故在图8(b)中不同误差下的SLMAT不做区分。由于是在同一噪声下进行实验,故在图7中不对噪声取值展示。蒙特卡罗仿真结果如表1、图8、图9所示。
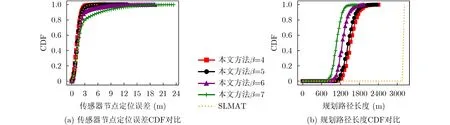
图7 β不同取值下CDF对比
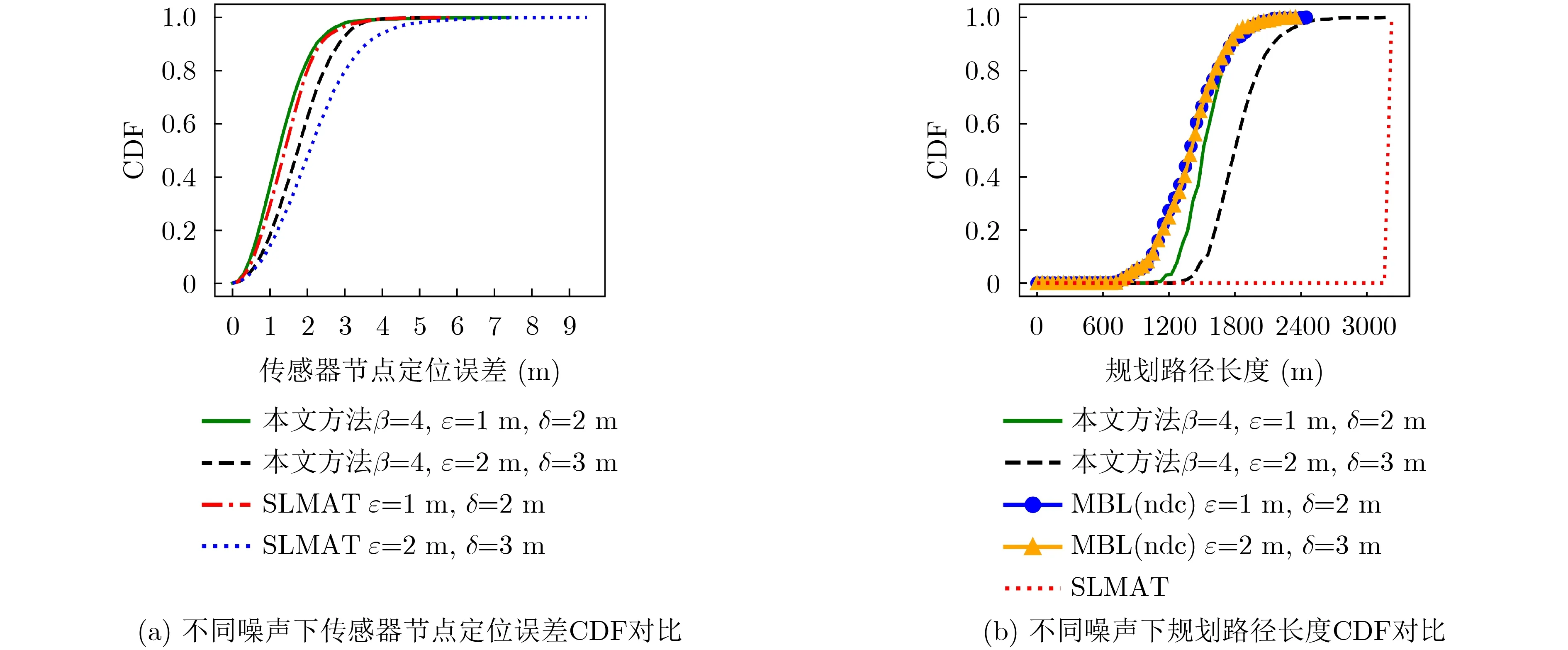
图8 不同噪声下CDF对比


图9 不同噪声下统计结果
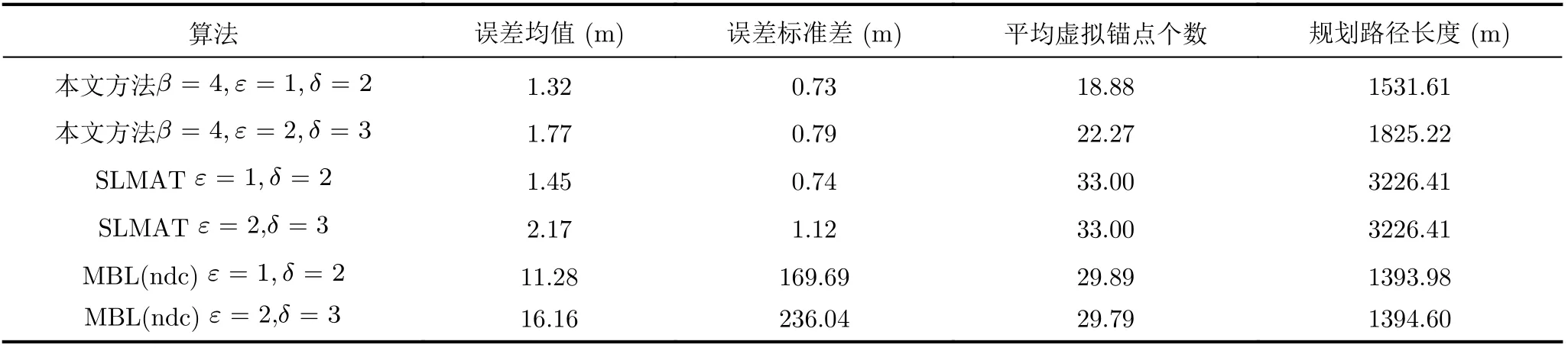
表1 统计学分析对比
通过上述仿真结果可以看到,本文方法在位置修正过程中兼顾了定位精度和能量利用率。因为本文方法提出是为了用于水下传感器节点的位置修正,故本文在监测区域为L×L×L的3维环境下进行位置修正的蒙特卡罗仿真验证。由于UASNs节点的深度信息可在本文所提动态路径规划方法和辅助UASNs节点定位时使用,以减少AUV移动能量消耗和提高定位精度。又因为暂未发现其他AUV辅助定位路径规划算法中利用到UASNs节点的深度信息,为保证展示结果公平性与展示有效性,故下文只展示本文方法结果。
通过图10与对比图7进行对比,可以发现不同的β取值下,传感器节点定位误差和为AUV规划路径长度变化趋势与2维仿真结果一致。同时,通过图11(a)、图11(c)可以看到定位误差也未超出误差上界。通过表2、图10、图11与表1、图8、图9进行对比可以看出在噪声增加时,传感器节点定位误差和为AUV规划路径长度的变化趋势与2维仿真中的表现一致。

图10 3维下CDF对比
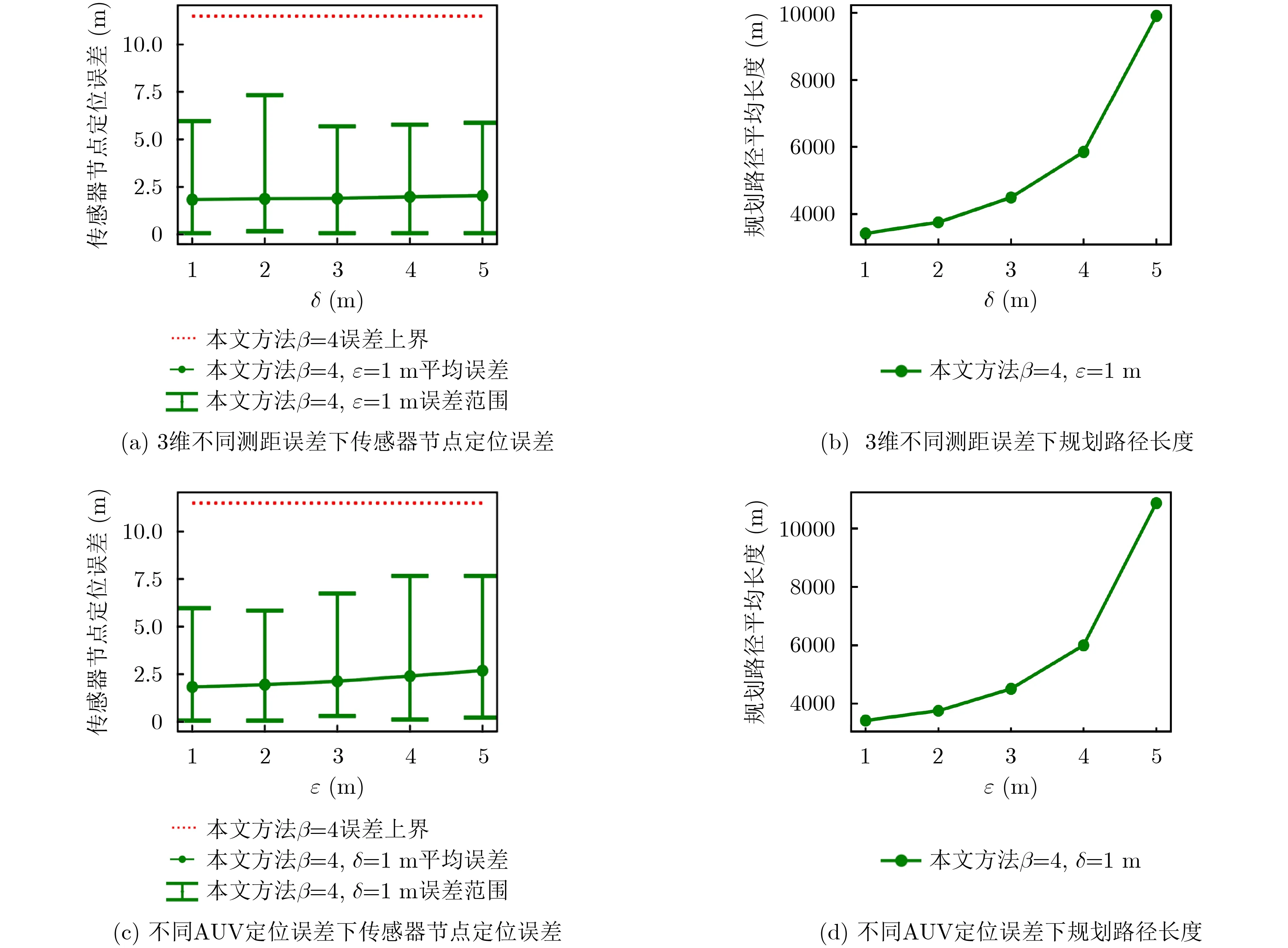
图11 不同噪声下统计结果

表2 统计学分析
5 结论
本文使用信息熵对传感器节点位置信息不确定性进行描述。为方便对传感器节点位置信息熵的表示和位置信息记录,本文将监测区域分割成方块。在此基础上,对传感器节点进行位置修正、根据信息增益期望和AUV移动预计能量损耗进行路径规划。最后通过仿真实验证明本文方法能在保证定位精度的基础上提高AUV能量利用效率。此外,本文方法能根据定位精度要求自动调整虚拟锚点个数,具有自适应性。