基于系统建模的仿生机器人研究
2022-06-24宋君君
宋君君
(德州职业技术学院,山东德州 253034)
0 引言
随着社会经济的迅速发展和社会生产力水平的进一步提升,仿生设计的重要性被逐渐挖掘。在机械设计过程中充分发挥结构仿生设计的优势,有助于促进机械设计理念的创新,对促进人类社会的发展进步大有裨益。基于此探析结构仿生设计方法及其在机械领域中的应用,具有十分重要的现实意义。
1 系统设计框架
本设计根据牛的特性,以牛静态行走作为四足机器人仿生模型,对机器人进行建模,采用先进的3D 打印技术制作仿生机器人“孺子牛”,产品采用Arduino 控制系统实现稳定控制,通过对四足机器人进行优化改良,构建了独特的仿生运动系统(图1)。

图1 仿生机器人
1.1 工作原理
本产品应用运动学分析方法,提升波动步态最大步幅运动时的稳定裕度,使四足机器人以不同速度行走时,对机体的电机控制参数加以修正,保证机器人稳定行走。也应用仿生研究方法,借助中枢模式发生器的组织协调方法与运动中枢的分解功能,运用适用于四足机器人的仿生控制系统作为运动的主要控制装置。
1.2 硬件结构
(1)机械部分。仿生牛整体的零部件是采用3D 打印技术打印制作,头部和颈部等大的结构基本由螺丝连接,腿部的关节运动通过舵机控制,语言模块和超声波模块分别位于牛头顶部和牛眼睛内框。通信的蓝牙、Wi-Fi 模块和控制器在牛的背部。仿生牛整体协调,动作稳定。
(2)电气部分。机械牛以专门的主板控制行动,以蓝牙接收编辑的程序和执行动作的命令使其运动。支持较远程的操作,相对于较大型的控制器成本小、体积小。机器人可以通过手机、语音进行控制,手机APP 控制界面操作简单明晰,对机械牛的动作操作达到全方位的细节调整,实现动作过程中的精准管理。
1.3 软件部分
主控流程如图2 所示。
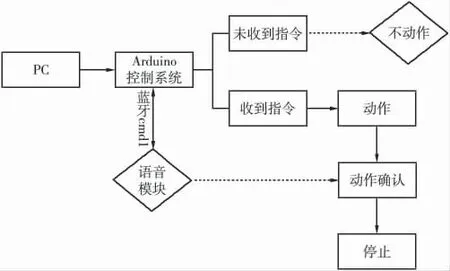
图2 主控流程
控制方式:①电脑操控,使用电脑软件对该产品进行操控;②语音操控,在5 m 内可以直接语音对话,使该产品进行一系列动作;③手机操控,运用手机APP 可以直接对该产品进行操控。
2 主要用到的关键技术
2.1 系统建模结合3D 打印
本产品以静态牛行走作为四足机器人仿生模型,对机器人进行建模(图3)。采用3D 打印技术制作模型;通过Arduino 控制系统实现运动控制,构建了独特的仿生运动系统。依照牛的行走动作来设计此系统,具体为建立矢状切面的四足机器人模型,即四足机器人前腿触地压缩而后腿未触地阶段、前、后腿触地阶段[1]。

图3 系统建模
2.2 Arduino 控制技术
操作明晰的Arduino 控制系统,采用了Arduino 驱动程序,它是一款便捷灵活、方便上手的开源电子原型平台,对机械牛的动作操作达到全方位的细节调整,实现动作过程中的精准管理。推动操作系统向简便化和精细化发展。Arduino 是一款便捷灵活、方便上手的开源电子原型平台,包含硬件(各种型号的Arduino 板)和软件(Arduino IDE)。本项目所用核心控制硬件为Arduino nano,Arduino IDE 是Arduino 产品的软件编辑环境。
机器人可以实现“前进”“后退”“右转”“左转”“停止动作”“步行”“原地踏步”“坐下”“插手”“自动跟随”“摇摆动作”“起卧动作”“自动行走”“踢球”等动作。程序中主要有两种姿态需要计算,涉及两个不同的计算代码公式,分别是步行姿态(步行计算代码公式)和原地踏步姿态(踏步计算代码公式)。
舵机校准位置,是机器人程序校准模式中舵机要求转到的位置。即腿部与脚部成一直线,腿部和身体垂直。从侧面和前后看,四足和身体都成站立姿势。H 是腿部舵机轴心到地面距离,Lhip是腿部舵机轴心到脚部舵机轴心的距离,Lleg是脚部舵机轴心到脚部前端的距离(图4)[2]。腿部长度Lhip和脚部长度Lleg可从零件本身测量;离地高H 为要求的高度数,不能设定得太高或太低。在姿态计算中,Lhip、Lleg和H 为已知数,需在程序起始设定好。
在原地踏步姿态中,需要在运动过程中,腿部舵机轴心与脚部零件前端一直保持在一条直线上且直线垂直地面。要达到这一要求,就要保持图4 中的L 长度不变,且L 线与H 线保持垂直。a 是腿部舵机实时位置与校准位置的夹角,而b+a 就等于脚部舵机实时位置与校准位置的夹角。
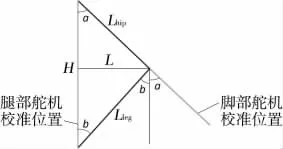
图4 四足机器人腿部姿态计算
在Arduino 编程中,所有涉及三角函数的计算,其中角的数字都不是角度,而是弧度,因此需要将角度和弧度相互转换,转换公式为:弧度=角度×π/1802,π是程序中的圆周率。9g 舵机控制程序中输入数字变化与实际舵机摆臂角度变化数之间有误差,经检测大致为:输入数字×0.9=实际角度。如果使用的不是9g 舵机,则此公式可能不适用。
由于距离测量误差和舵机转动数和实际角度变化数转换的误差,在实际运用计算公式时,计算出的结果不一定能使机器人的动作协调平衡,因此也在公式中个别位置增加了补偿数,这个数字是在实践中尝试得出,不是计算出来的。
3 技术性能指标
(1)动作指标:坐姿、握手、跟随、原地踏步、站姿、前进、后退、左转、右转等动作都可进行。
(2)物料指标:驱动电池采用12 V 交流电源,传感器采用电源直流3.6 V,控制器采用Arduino。
4 结论
与市场现有的机器人比较,在价格上有明显差异,通过采用系统建模结合3D 打印技术的产品较为廉价,大幅降低了机器人的成本。在稳定性方面,市场上现有机器人性能与本产品差异不大。
