C120S无人船测量系统在水下地形测量中的应用
2022-06-24董燕枫
董燕枫
(安徽省水利水电勘测设计研究总院有限公司,合肥 230022)
目前水下地形测量主要以GNSS接收机为平面定位设备,以测深仪为测深设备,根据水面高程和水深数据来计算水下地形点高程[1],所用船只多为燃油机动船或橡皮船。近年来,仪器厂商通过将GNSS、测深仪与无人船集成,打造了无人船测深系统,同时还搭载网络通信系统、操控系统、避障系统、摄像系统,实现了外业水下测绘的自动化和可视化。无人船测量系统已逐渐应用于水下地形测量和河道断面测量、水文监测等领域。本文以无为市花渡河、环城河治理工程为例,采用科微智能公司C120S型号无人船对某水域水下地形进行测量,得到了较高精度的水下地形测量数据,表明了无人船水下测量的可行性。
1 无人船测量系统和工作原理
1.1 系统组成
C120S无人船测量系统包括测量系统和船体控制系统(见图1)。测量系统集成了测量船、GNSS接收机、数字测深仪、供电系统、主控系统、推进系统和避障雷达、摄像头等。采用RTK内置电台方式定位时,岸上还要架设基准站。船体控制系统由通信基站、无人船遥控器以及安装有导航测深软件的笔记本电脑等组成。若采用4G 或5G 网络模式与无人船连接,通信基站也可取消。
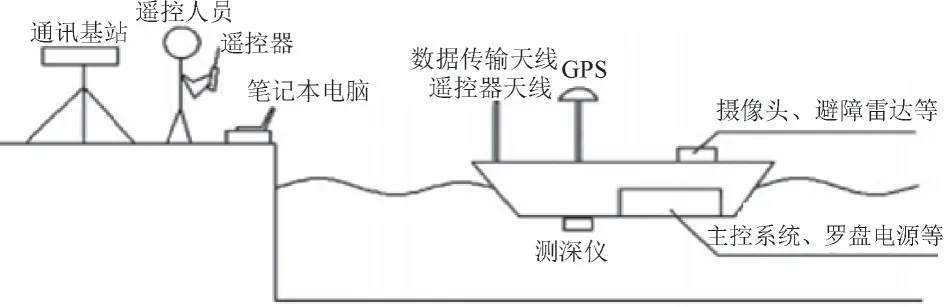
图1 无人船测量系统
1.2 工作原理
无人船测量系统采用GNSS-RTK 来获取水下地形点的平面坐标。水深测量由安置在船上的测深仪完成,换能器将电脉冲转换成机械振动,并以声波的形式垂直向水底发射。声波到达水底后,部分会被反射回来。换能器接收后,可计算出声波的传播时间t。根据声速v和传播时间t可计算出水深h=(v×t)/2。
测深软件显示测量时刻的水深并显示回波图形。C120S型无人测量船静态吃水为固定值0.2 m,GNSS 天线顶端到水面的距离为0.5 m。通过GNSRTK技术可获得实时的水面高程H水面,进而可以计算出水底高程H水底=H水面-h-0.2。
2 应用实例
2.1 测区概况
无为市花渡河、环城河治理工程内部水系为环城河及花渡河故道,所涉外部水系为花渡河以及西河。为了解工程区的地形地貌情况,需对河道、堤岸以及建筑物进行地形测量。工程区域总水域面积为2.0 km2,河宽200 ~300 m,环城河及花渡河故道,水深较浅,花渡河故道沿线圩堤较多,环城河两岸已建成城市公园,河中水下喷泉较多,测区沿线有9座桥梁,2处涵洞,传统载人燃油机动船不易搬运、而水域面积太大橡皮船效率太低。无人船体积小,重量轻,便于搬运,非常适合在测区作业。
2.2 测量实施
使用云影C200 型电动垂直起降固定翼无人机系统搭载RIEGL VUX-120 机载激光雷达获取测区的数字正射影像、数字高程模型和地面点高程,完成岸上部分的地形图绘制和水域水涯线的绘制。
以测区数字正射影像成果作为工作底图,在CAD中进行无人船自动航行线路设计(见图2)。由于正射影像分辨率高、现势性强,正射影像中水涯线、浅滩礁石、水下喷泉、水生植物等清晰可见,复杂水域无人船测深的测线布设问题得到有效解决[2]。布线时应考虑船体大小、船速、转弯半径等因素,不可使测线端点距离岸边太近。根据测图比例尺要求每10 m布置一条测线,线路设计完成后导入无人船导航软件中。

图2 自动航行线路设计避开水下喷泉
在开始测量工作前,完成船上的GNSS-RTK 定位系统和遥控通信设备与岸上的控制系统的连接,设置安全的Home 点,保证无人船在电量不足或其他意外情况时能够安全返航。在岸上利用电脑端导航软件和遥控器控制无人船的航行和数据采集工作。密切观察无人船航行,遥控切换自动和手动模式。在浅滩、近岸、礁石分布较多的水域切换手动模式,使用遥控器控制无人船测量。在水生植物分布较多的区域,使用橡皮船和测杆人工测量。测深软件为HiMAX软件,完成一块水域测量后可现场检查成果质量、剔除粗差等,在CASS绘图软件中生成水下地形等高线草图来判断数据质量。无人船水下测量现场见图3。

图3 无人船水下测量现场
3 单波束水深数据处理
单波束水深数据处理采用HiMAX测深仪软件,将每条测线按照“水深取样—数据改正—潮位改正—数据预览”4 个步骤处理得到水下地形的高程信息,外业采集的原始数据即转换为CASS 制图软件可编辑数据。
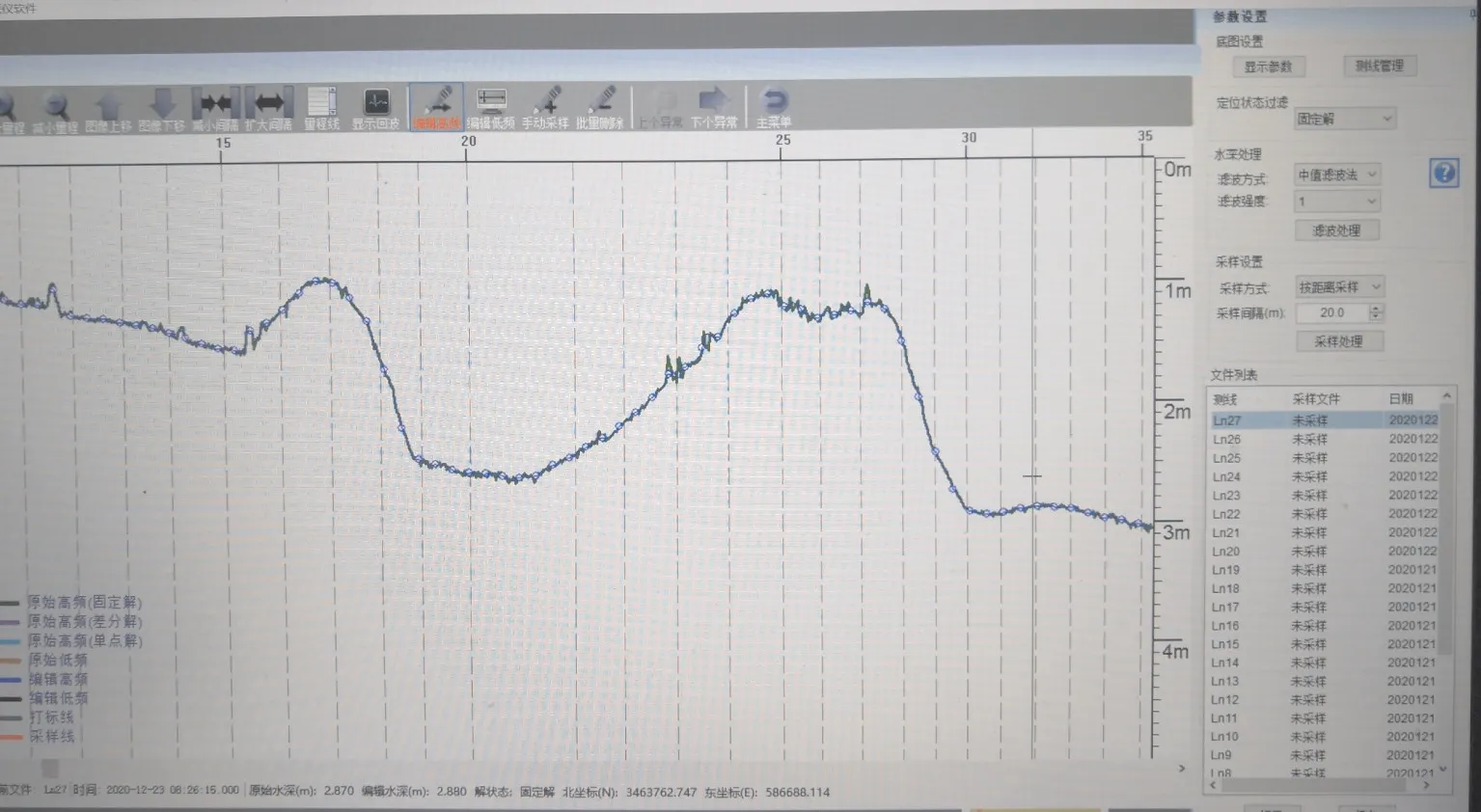
图4 水深数据取样
水深测量不是在静止的情况下完成的,在测量过程中会不可避免地受到鱼群、水草、船尾流气泡、回波二次反射等各种因素的干扰,这时水深会出现异常点[3]。在数据处理时,按天依次对每个测线进行处理。在水深取样时,定位状态过滤选择固定解,水深处理方法选择中值滤波法,按照回波趋势修正水深,按距离采样,采样间隔选择2 m(见图4)。
采样完成后再进行回放检查(见图5),以保证水深数据质量。
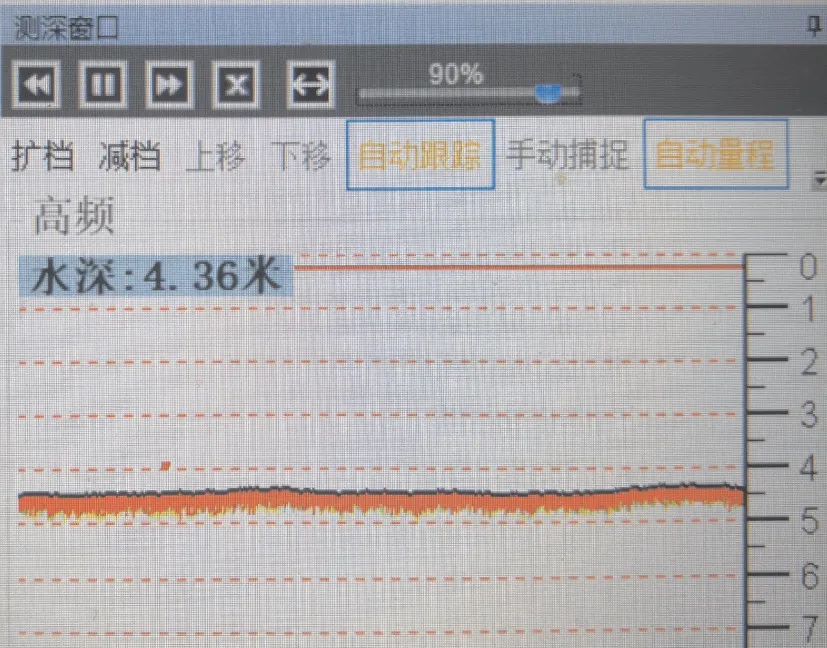
图5 水深数据回放检查
水深取样完成后,再进行各项改正,包括转换参数改正、延迟改正、吃水改正、声速改正等。数据处理时,使用实时水面高程,可不进行潮位改正。各项改正完成后,导出CASS 绘图软件可直接编辑的数据格式,进行数据预览,查看水下地形点的分布情况,查缺补漏。
4 精度分析
每段区域测量完成后,即对测区进行检查断面测量。检查断面与测深断面垂直相交。在剔除粗差后,共采集有效水下地形点97 963点。经计算本工程检查线长度占测深线长度的7%。经统计检查线与测深线相交处图上1 mm范围内水深点的深度检查互差情况如表1所示。

表1 深度检查互差表 m
依据《水利水电工程测量规范》(SL 197-2013),当水深小于20 m时互差限差为±0.4 m[4]。测区最深处为7.11 m,水深重合点超限点为3 点,合格率为99.6%,平均互差为0.05 m,互差绝大部分集中在0~0.1区间,数据质量满足规范要求。
影响无人船测量精度的主要因素是测量船的姿态测量引起的误差、换能器相对位置变化引起的误差、延迟误差、声速传播误差等[5]。无人船与载人船相比体积小、重量轻,当风浪较大,船速较快时,无人船的姿态、换能器相对位置变化较大,对水深测量精度影响较大。因此,要在风浪较小,船速适当的情况下作业,使无人船保持良好的姿态。声速传播误差与延迟误差对无人船和载人船影响基本相同,只要船速适当、水面波动不大,无人船测量和载人船外业测量精度基本相当。
5 结语
基于无人船测量技术,进行了无为市花渡河、环城河水下地形测量并进行了精度分析。误差分析发现,主测线水深与检测线水深互差具有较高的合格率,说明无人船测量误差已控制在合理范围内,是一种可靠的水下地形测量方法。与传统载人船测深技术相比,无人船测量受水面波动误差、姿态误差影响大于载人船。在水草、渔网较多的复杂水域环境局限性高,无人船水下地形测量受到一定限制,然而由于无人船测量具有机动灵活、效率高、危险性低等优点,长远来看无人船测量仍然具有较广的应用前景。