列车自动加水装置*
2022-06-24常龙龙徐晨辰林子贤程钟鑫
常龙龙,徐晨辰,林子贤,程钟鑫
(河南科技大学信息工程学院,河南 洛阳 471023)
1 绪论
1.1 研制背景及意义
目前我国高铁车内用水是由水箱提供,由于旅客的用水量较大,而火车水箱的容积又很有限,靠站时间短,因此,采用列车停靠期间的人工加水方式存在加水量不稳定,人员安全性等方面的问题。
传统的列车加水采用人工加水的办法(如图1),列车上水工是公认的铁路部门最辛苦的岗位,每天要扛着50多斤重的水管,在股道间来回奔走16公里以上,步数超过26000步,上水量接近15 t。在冬天和夏天的极端天气,不仅人工成本巨大,且对于停站时间短的站点不具备人工加水条件,效率低下还容易造成水资的浪费[1]。此外,在冬季上水时,管接头上容易结一层薄冰,水管更不易套牢,流失的水会冻结在铁轨两旁,日积月累,冰层会高出铁轨,给行驶的列车造成安全隐患。

图1 传统人工列车加水图
我国高铁事业处于世界领先地位,不论在自动化、信息化以及现代化的管理都远超其他国家,而陈旧的客车上水作业及管理模式已严重影响了高铁的运营效率及整体形象。为了提升列车上水自动化作业水平,提高加水作业劳动效率,本项目针对高铁的加水结构及运行特点,利用图像处理和电机运动控制技术,设计了一个列车智能加水装置。
1.2 国内外研究现状
目前国内外列车站台的列车加水作业均采用人工加水的方式,普遍采用不带阀门的橡胶水管直接套在火车水箱的注水口上,由于没有夹紧装置,是靠人工依照橡胶管本身的弹力套紧,费时费力。暂无列车自动加水装置的应用。国内现有的列车加水系统发力点在水满自动关停和注水口检测方法上;水满自动关停系统早在2010年就开始投入使用,相对人工判断的关停系统提高了关停时间的精确性,极大的避免了水资源的浪费,但无法实现代替人工实现自动化上水的目的。现有的列车注水口检测方法大多停留在概念阶段,尚无设备实现并投入使用。
2 系统方案设计
2.1 整体方案综述
列车智能加水装置,利用图像处理技术和电机控制技术实现列车加水过程的自动化。利用摄像头采集目标注水口的图像信息与实现存储的模板相匹配,确定注水口的位置信息。将特征值的像素信息映射为实际距离并传输给微控制器,由微控制器控制执行机构将水枪送入目标注水口,其中步进电机使用梯形加减速算法避免丢步现象的产生,使得目标管道精确运送到指定位置。当注水完成后再次启动电机将水管抽出完成整个列车加水的过程。同时,微控制器会将设备的加水量等状态通过4G/WIFI传输到控制台,加水的工作人员通过控制台可监测到上水装置的工作状态。达到列车自动上水的目的,极大的简化了上水工的工作量节约了人工成本,图2为系统结构图。
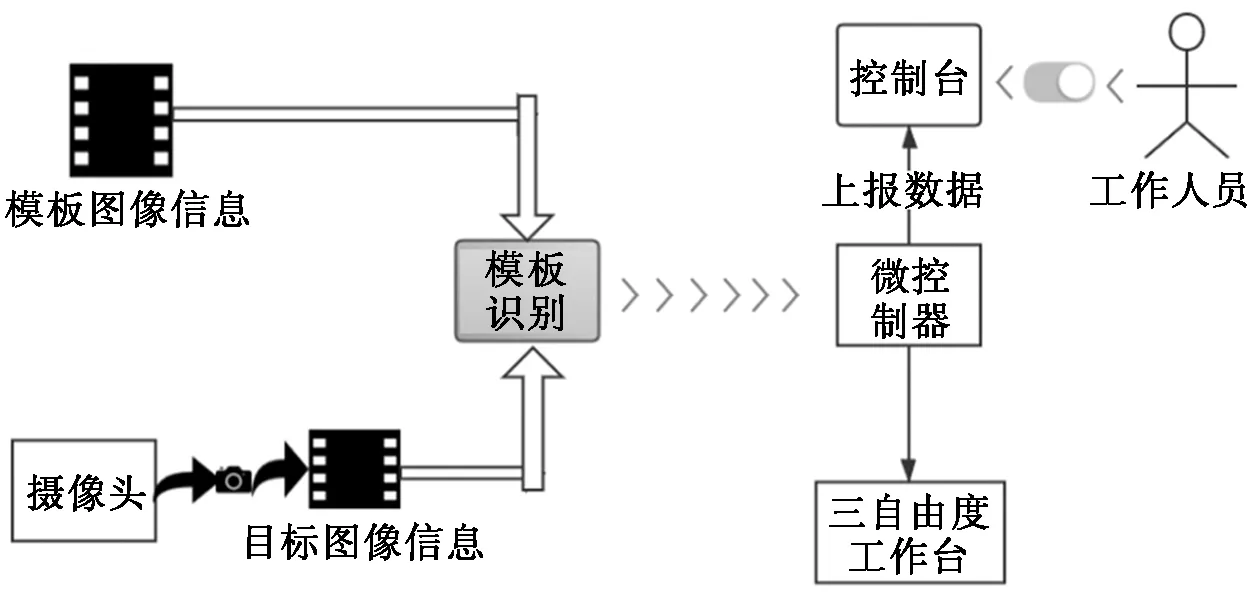
图2 系统结构图
2.2 研究思路
图像处理可采用NCC模板匹配算法:预先采集各种型号各个角度列车上水口的图像信息,当目标列车到站后设备上的摄像头捕捉列车图像并做去畸变处理,将处理后的图像利用NCC算法与预先采集的图像做模板匹配,检测目标上水口。
电机控制可采用梯形加减速算法,避免步进电机的丢步现象,实现对电机运动步数的精确控制。当目标摄像头检测到上水口,根据目标上水口几何中心在图像中的像素位置映射到距离计算出每个维度步进电机移动的距离将水管送至目标上水口。
3 目标图像处理
本设计采用图像处理的方法寻找目标上水口,使用OpenMV的开源机器视觉库,通过NCC模板匹配算法确定位置,预先采集各种型号各个角度列车上水口的图像信息,当目标列车到站后设备上的摄像头捕捉列车图像并做去畸变处理,将处理后的图像利用NCC算法与预先采集的图像做模板匹配,检测目标上水口。
模板匹配是一项在一幅图像中寻找与另一幅模板图像最匹配部分的技术,通过目标图片在待匹配图片进行遍历,通过选择一定的匹配方式能够得到每个起始像素点的匹配值,最终匹配值最大的位置就是候选匹配位置,也就达到了匹配查找的效果[2]。
本设计中用到的模板匹配算法为NCC算法,一种基于统计学计算两组样本数据相关性的算法,其取值范围为[-1, 1]之间,而对图像来说,每个像素点都可以看出是RGB数值,这样整幅图像就可以看成是一个样本数据的集合,如果它有一个子集与另外一个样本数据相互匹配则它的NCC值为1,表示相关性很高,如果是-1则表示完全不相关,基于这个原理,实现图像基于模板匹配识别算法,其中第一步就是要归一化数据,数学公式如下:

其中f表示像素点p的灰度值;μ表示面口所有像素平均值;σ表示标准方差,假设t表示模板像素值,则完整的NCC计算公式表示如下:

其中n表示模板的像素总数;n-1是自由度。
模板匹配确定目标位置的像素点之后,由于采集到的图像信息是畸变的,即成像过程中所产生的图像像元的几何位置相对于参照系统发生的挤压、伸展、偏移和扭曲变形,使图像的几何位置、尺寸、形状、方位等发生改变,为使得像素点到距离映射的成功,本作品采用了基于畸变等效曲面的图像畸变校正,我们使用球形模型来模拟图像畸变的产生[3]。由于光学系统或传感器的畸变原因是很难精确描述的,为了正确进行畸变的校正,将这种畸变做如下等效:假设光学系统或传感器不产生任何畸变,而是成像面发生了弯曲,即成像面不再是一个平面,而是形成了某种曲面,那么这个曲面为畸变等效曲面。入射的光线成像在这个畸变等效曲面上,如果这个曲面产生畸变的结果与原来完全相同,对这个曲面进行分析,将其校正到理想的平面,就达到了畸变校正的目的,图3为模板匹配算法实现效果图。
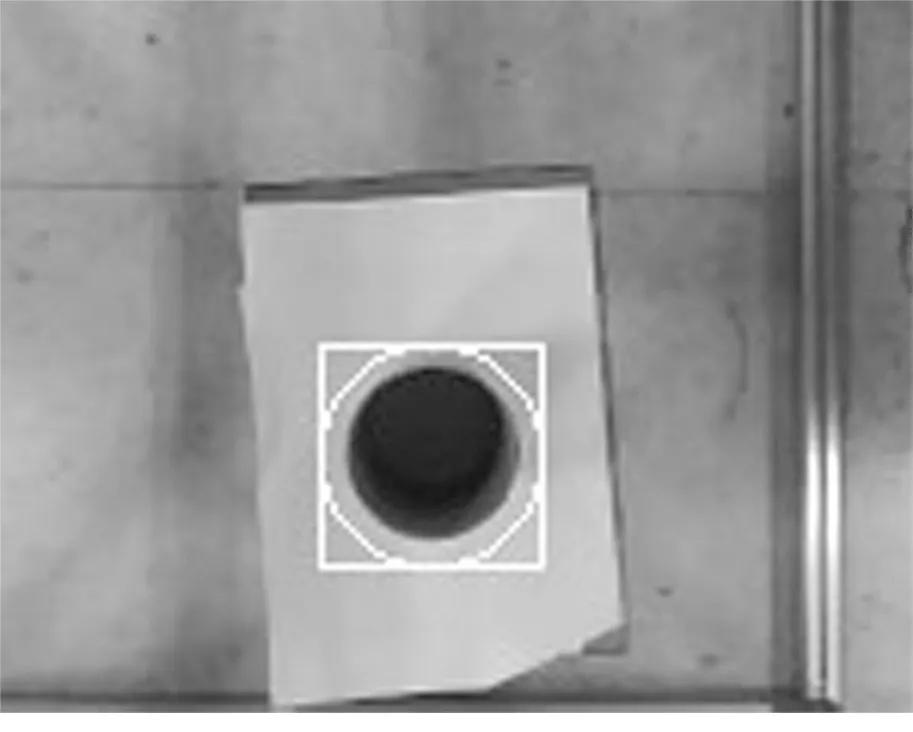
图3 模板匹配算法实现示意图
4 电机控制算法运用
摄像头得到目标注水口中心点的像素位置,对像素位的图片进行畸变矫正,这一步将目标注水口中心点的像素位置映射成距目标注水口中心点的距离,然后根据距离的大小,步进电机带动三自由度工作台将目标管道送入目标注水口。然而步进电机是一个开环系统,负载位置对于控制电路没有反馈,为解决步进电机在运行过程中的丢步问题,步进电机运动的控制采用梯形加减速算法。图4为梯形加减速算法运行曲线图。
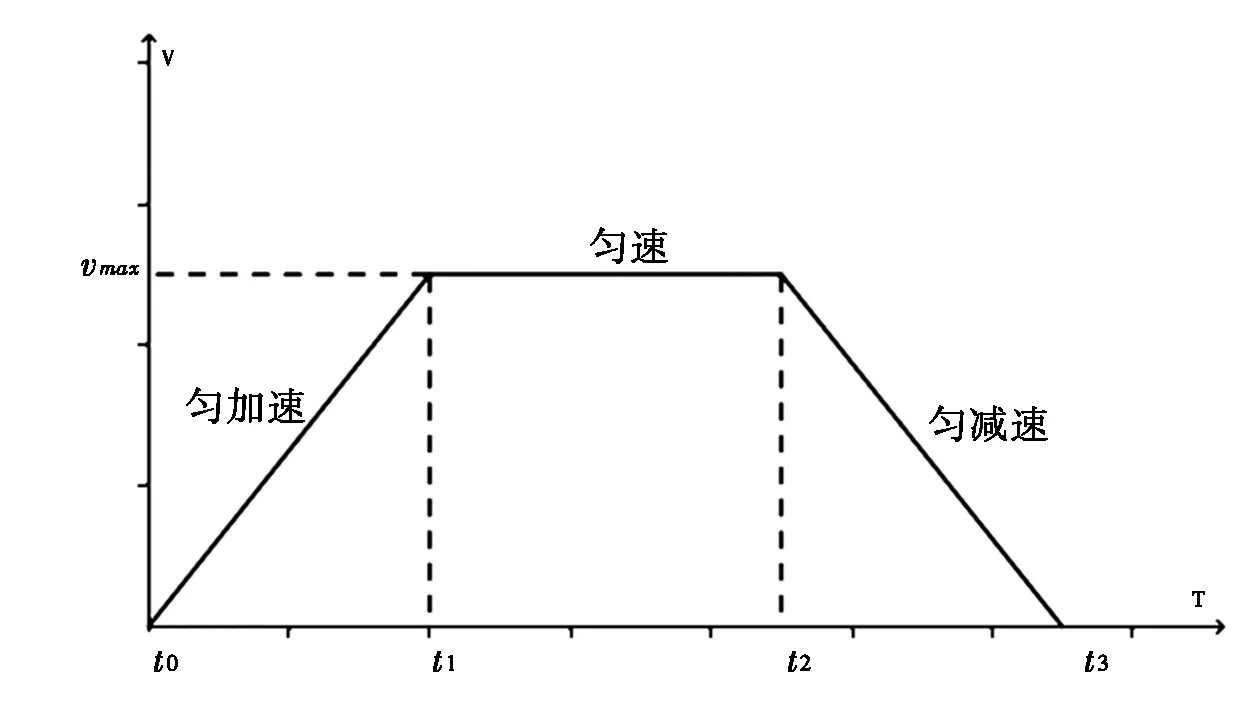
图4 梯形加减速运行曲线图
梯形加减速运行曲线如图4所示,梯形加减速整个过程分为匀加速、匀速以及匀减速三个阶段。假设t为两个脉冲之间的时间间隔,它的大小将决定着步进电机转速,为让电机转速符合加减速曲线[4]。一个非常重要的步骤是计算合适时间间隔t,在加减速阶段t可以认为是线性变化的。而在平稳速度阶段t也是平稳不变的。
在程序实现时使用单片机的定时器计数频率近似表示步进电机运动时相邻两个脉冲的时间间隔,某个时刻的速度可以由速度和加速度的关系来求得:
第n个步进脉冲后产生的轴偏移角度θ,所以前n个脉冲的总时间和第n个步进脉冲的脉冲周期时间:
最终,可以求得第n个脉冲实际需求的定时器计数值:

那么,第1个脉冲的定时器计数值为:
最后,可以得到:
用算法实现最终可得到:

new_rest=(2·step_delay+rest)(mod(4·accel_count+1)).
5 研究成果
本项目通过理论创新、实践创新,已经完成对列车智能加水装置的开发。图5所示为列车智能加水装置实现效果图。

图5 列车智能加水装置实现效果图
6 结束语
近年来我国铁路机车拥有量不断增长,反应出我国铁路事业的飞速发展。截至2020年中国铁路官方发布数据,全国铁路机车拥有量为2.2万台,铁路客车拥有量为7.5万辆,其中动车组3256标准组为26048辆。截止2020年我国共有铁路站台5470个,其中40%需要承担列车加水工作,每个扎道需要5~6名列车加水员,而所有列车均采用人工加水,共需要列车加水员数万名,并且对于高铁来说还存在小站停车时间短不能人工加水的问题[5]。列车自动化加水处于空白状态,所以该项目有巨大的市场潜力。高度的自动化,无需人工操作,不仅可以提高效率,节约人工成本,还可以将数据通过5G或WIFI局域网将数据发送到总控制台,实现工作过程的可视化,使我国高铁的现代化建设更进一步。
