基于UM4B0的车载变道辅助系统设计
2022-06-24田芮珏曹晓钰肖广兵
田芮珏,马 浩,曹晓钰,肖广兵
(1.南京林业大学汽车与交通工程学院,江苏 南京 210037;2.南京林业大学信息科学技术学院,江苏 南京 210037)
0 引言
车辆在行驶过程中会碰到各类突发情况。车辆在十字路口变道时,由于司机不能及时对在视觉盲区突然冲出的行人作出恰当的反应,会造成车辆和行人碰撞。目前,国内外解决这一问题的方法有车载全球定位系统(global positioning system,GPS)定位[1]、安装反光镜等[2]。用车载GPS定位查看其他车辆的位置,可在车辆碰撞前及时避让其他车辆。但是此方法在GPS信号不良时不能精准地定位车辆的位置,会产生延迟,而且不能查看行人和电瓶车的位置。在车辆右侧人行道的适当位置安装反光镜,可以让行人得到车辆移动的信息从而判断能否通过。但是此方法让行人变得被动,而且在道路车辆[3]极多的情况下车辆连续迅速通过,会导致行人没有办法通过该路口。
本文设计的车载变道辅助系统利用GPS系统、中国北斗卫星导航系统(BeiDou navigation satellite system,BDS)[4]和全球卫星导航系统(global Navigation satellite system,GLONASS)[5]等定位系统收集车辆和行人的位置信息,再将得到的信息用算法计算得到两者的高精度位置信息,使车辆能接收到自身、附近行人和其他车辆的精准定位信息。车载变道辅助系统成本较低,能较好地解决司机不能及时对在视觉盲区冲出的行人作出反应而造成的交通事故[6]。
1 系统设计
基于UM4B0的车载车辆变道辅助系统以UM4B0为核心。首先,通过硬件设备,收集车辆自身、行人和其他车辆的GPS、BDS、GLONASS等定位信息;然后,将收集的定位信息通过算法进行计算,得到车辆自身、行人和其他车辆的高精度位置;最后,将三者的位置信息同时上传到该系统并处理成像。司机可以根据这些图像,在转弯或变道时提前看到处于视觉盲区的行人和其他车辆,从而提前减慢速度或直接停车避让行人,以减少交通事故发生的概率。
系统设计如图1所示。
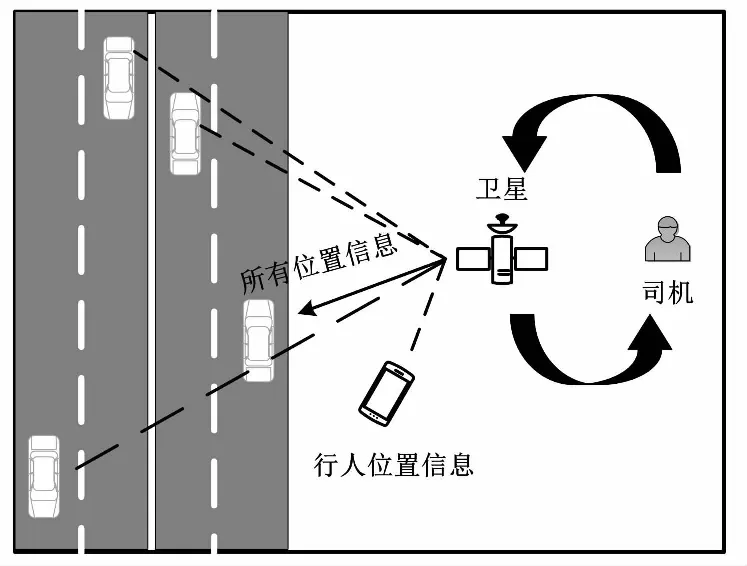
图1 系统设计图
2 硬件电路设计
基于UM4B0的车载变道辅助系统的硬件有供电模块、主处理器模块、高精度定位模块、三轴传感器模块和无线通信模块。
2.1 供电模块
基于UM4B0的车载变道辅助系统中:主处理器使用2.0~3.6 V直流电压;高精度定位模块使用3.2~3.3 V直流电压;三轴传感器模块使用2.5 V直流电压;供电模块以磷酸铁锂电池组[7]为电源,稳压芯片配合使用AMS1117-3.3稳压芯片[8]。AMS1117-3.3输出3.3 V左右电压,具有低功耗、面积小、性能稳定[9]等优点。AMS1117稳压芯片有固定电压输出和可调电压输出两种版本。本设计应用固定电压输出的3.3 V版本。AMS1117芯片的温度适用范围为-20~+120 ℃,并且芯片略微调低了基准电压的误差,而且也调整了电流限制,尽可能削减了因稳压器和电源电路超载而造成的压力。
供电模块如图2所示。
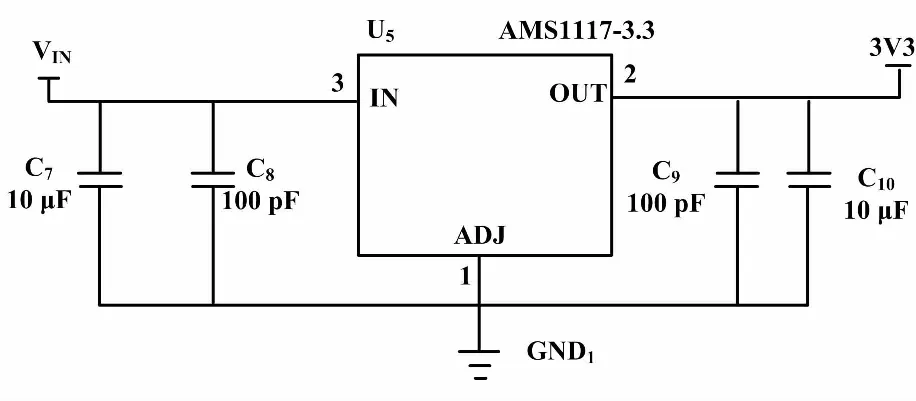
图2 供电模块
2.2 主处理器模块
基于UM4B0的车载变道辅助系统使用STM32F103微型控制器[10]。STM32F系列是由意法半导体公司出品的32位ARM微控制器,由Cortex-M3作为芯片内核[11]。该芯片功耗低,有睡眠、待机和停机三种模式[12]。中央处理器(central processing unit,CPU)的工作频率最高为72 MHz,有着最大64 KB的静态随机存取存储器(static random-access memory,SRAM),以及达8个定位器、9个通信接口和112个快速I/O端口。该控制器性能优越,所以在各个领域中被广泛应用。主处理器模块如图3所示。
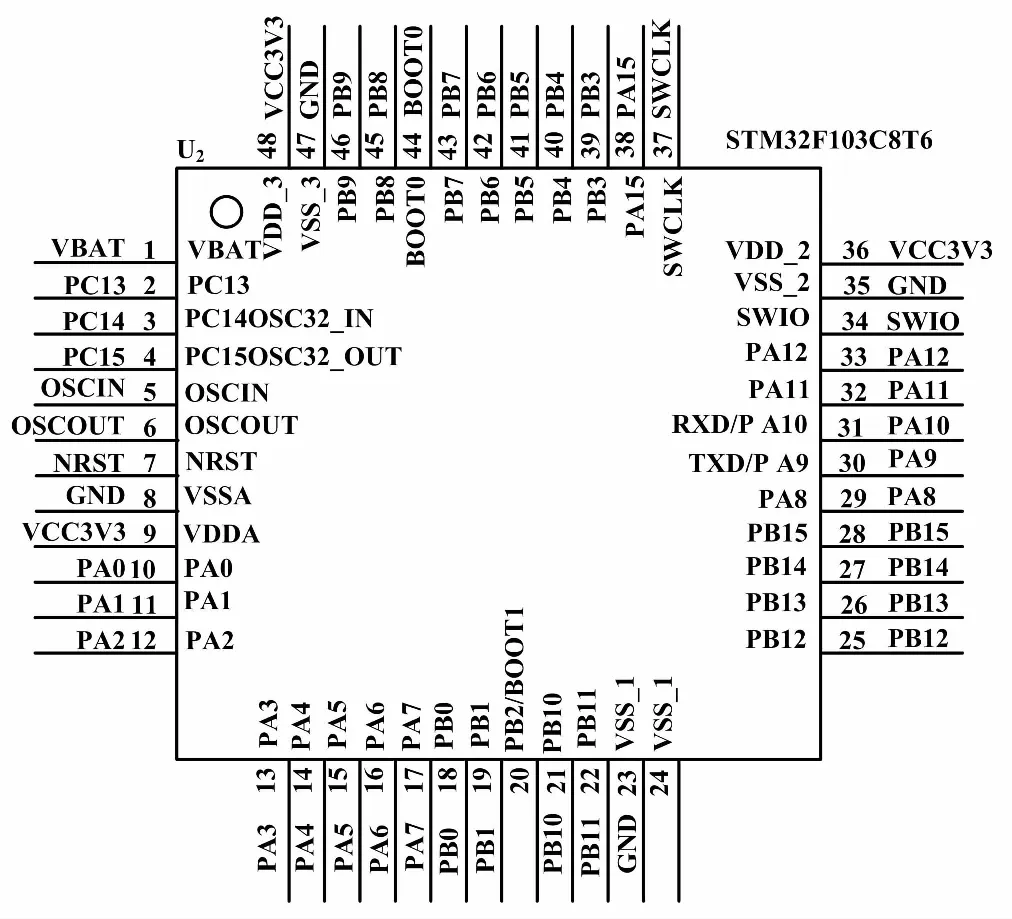
图3 主处理器模块
2.3 高精度定位模块
基于UM4B0的车载变道辅助系统使用UM4B0高精度定位模块获得高精度的车辆和行人的位置信息。UM4B0是一款4系统11频点高精度定位模块,能同时跟踪GPS、BDS、GLONASS、伽利略卫星导航系统[13]等全系统多频卫星信号,并进行多频点抗干扰处理。UM4B0性能优越,也是业内较小的全系统全频实时差分定位(real-time kinematic,RTK)定位模块[14],具有20 Hz高数据输出率,支持串口、1PPS、Event 等多种物理接口[15]。通过算法,UM4B0能实现在森林、隧道、楼宇等GPS信号不强的地方对车辆和行人的高质量、高精度定位,应用领域广泛。UM4B0电路如图4所示。
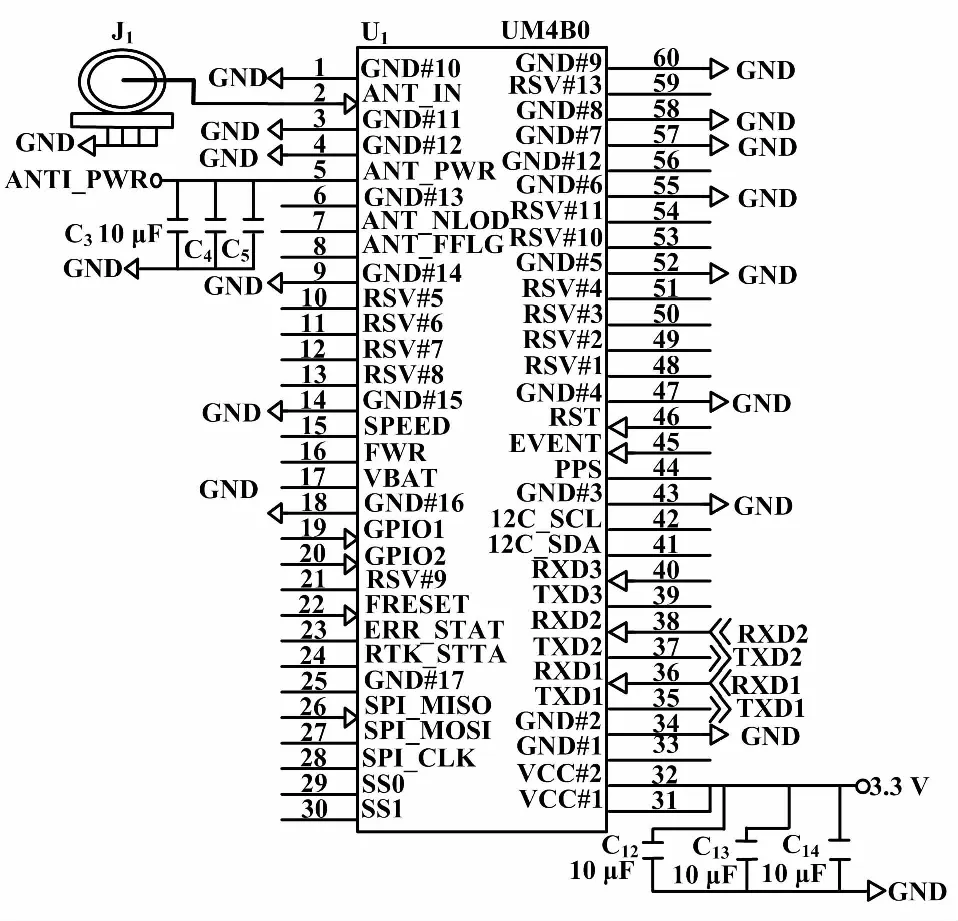
图4 UM4B0电路图
2.4 三轴传感器模块
基于UM4B0的车载变道辅助系统使用LIS3DH三轴传感器模块监测车辆的转弯情况[16]。LIS3DH电路如图5所示。
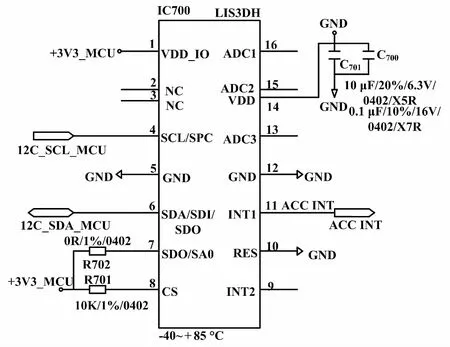
图5 LIS3DH电路图
LIS3DH内置先入先出(first input first output,FIFO)存储器和高性能加速度传感器,具有超低功耗、高性能、满量程的特点[17],LIS3DH具有数字I2C/串行外设接口(serial peripheral interface,SPI)标准输出[18]。用户可动态选择的完整量程为±2g/±4g/±8g/±16g,能够用输出数据速率测量1 Hz~5.3 kHz的输出速率数据测量加速度。LIS3DH具有1个数据就绪信号(data ready signat,DRDY)。DKDY用于指示一组新测量的加速度数据是否是可用。
3 系统软件设计
系统设计采用Visual Basic 6.0开发设计,搭建变道辅助界面。软件主界面如图6所示。当时间为早上6点到下午7点时,用户进入主界面出现如图6(a)所示的软件主界面(白天);当时间为下午7点到早上6点时,用户进入主界面出现如图6(b)所示的软件主界面(夜晚)。
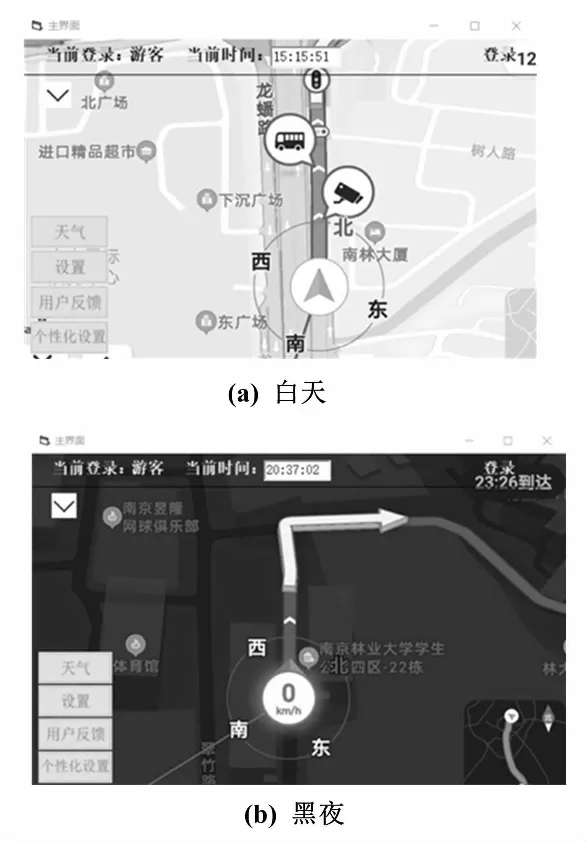
图6 软件主界面
这一设计使用户在打开软件时能看到和当前环境相适应的界面,以及相应功能对应的进入按钮。用户在进入主界面时,不需要任何操作就能在界面上看到车辆所在的位置和行驶方向,并且不需要任何操作就能自动跳转到变道辅助界面,从而较好地提高用户的体验感。
由图6可知,系统主界面由天气、设置、用户反馈、个性化设置、下三角按钮、登录按钮、时间框所构成,分别实现天气查看、软件设置、用户反馈、软件界面个性化设置、道路规划与导航、用户管理员登录、时间查看等功能。
开始使用车辆变道辅助系统时,用户可以再选择是否开启变道辅助后进入主界面。该软件的核心是车辆转弯或变道辅助。高精度定位模块收集和计算车辆和行人的高精度位置,并将两者位置传给车辆,实现基于高精度定位的变道辅助。三轴加速度计可以监测车辆转弯或变道状态。如果用户选择开启变道辅助并检测到车辆转弯或变道时,跳出变道辅助界面;如果用户选择不开启变道辅助,则不会跳出变道辅助界面。除变道辅助功能外,系统还设有道路规划、设置、天气、用户反馈以及个性化设置功能。道路规划功能可根据用户输入的目的地进行道路规划和导航。用户反馈界面能让用户反馈在软件内遇到的问题,并且上传相关资料,从而改善软件的错误和不足之处。天气界面能让用户查看到近一周的天气状况、湿度、风速和路面湿滑状况。设置界面可控制变道辅助功能的开启或关闭,并实现路线规划的功能。用户可通过个性化设置改变软件的字体和背景颜色。
用户在打开软件时,会跳出选择是否打开变道辅助提示框选项。用户可以在该界面选择是否开启变道辅助功能。用户作出选择后,软件根据时间出现对应软件主界面。该设计能够提高用户的选择权。
如用户在开启软件的时候点击开启变道辅助,则当检测到车辆有变道或转弯操作时,软件会自动弹出打开变道辅助提示框,并出现变道辅助界面。如用户在开启软件的时候点击不开启变道辅助,则当检测到车辆有变道或转向操作[19-20]时,软件不会自动弹出该提示框,且不会出现变道辅助界面。
变道辅助如图7所示。
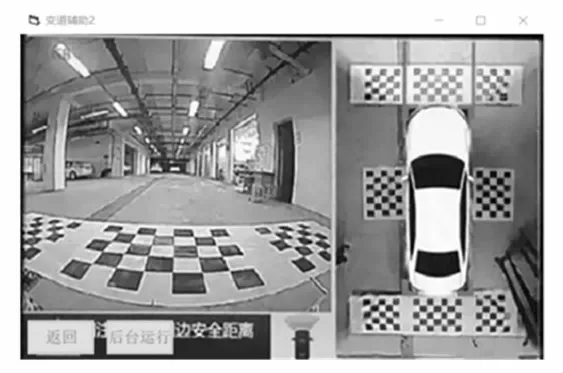
图7 变道辅助
在车辆变道或转变时,屏幕会弹出打开变道辅助提示框后出现变道辅助界面。用户可以在该界面看到车辆的高精度位置和车辆附近的行人高精度位置。如用户不能及时通过屏幕看到两者的高精度位置,则当附近车辆或行人距离车辆过近时,软件会语音播报行人和车辆的位置,使用户能提前减速或停车,从而避让其他车辆和行人。当车辆转弯或变道结束后,软件会自动弹出提示并跳回主界面或进入变道辅助前的其他功能界面。
当软件在变道辅助界面检测到车辆结束变道或转弯操作时,首先系统会自动跳出关闭变道辅助提示框,提示用户车辆转弯或变道已经结束;然后系统会自动退出变道辅助界面并且返回进入变道辅助前的其他界面。
软件设置了天气界面。用户可以在该界面直观地看到车辆所在地近5天的天气状况。管理员可以在该界面点击其他天气按钮查看所在地当天的其他天气情况,包括湿度、风速和路面湿滑程度。天气界面的设置可以让用户知道所在地的具体天气状况,从而对雨天、雾天或其他天气作出应对准备。
软件也提供路线规划服务。用户可以通过点击主界面的下三角按钮选择手动输入或者语音输入目的地,随后软件为用户规划最优路线。当规划为最优路线后自动跳转到导航界面导航,用户可以跟随导航行驶到目的地。
4 结论
本文以UM4B0高精度定位模块为核心,设计车载变道辅助系统。车载变道辅助系统利用高精度定位模块UM4B0和其他硬件收集车辆和行人的定位信息,将得到的信息通过算法计算出车辆和行人的高精度定位位置。车载变道辅助系统在监测到车辆在转弯或变道时,在车载屏幕上显示两者位置。车载变道辅助系统可以有效解决司机在GPS信号不好的区域不能及时发现视觉盲区的行人的问题,让司机在转弯或变道时能及时发现视觉盲区的行人以提前减速或停车避让,从而减少车辆碰撞发生的概率。
