基于时序分析和经验模态分解的航空发动机振动传感器数据验证技术
2022-06-24甘茂锐
甘茂锐 丁 力
(中国航发控制系统研究所,江苏 无锡 214063)
为保障航空航天器的飞行安全,必须要密切监测发动机的各项参数,确保始终以良好工况运行。其中,振动信号能够较为直观地反映出航空发动机的运行情况,是发动机运行监测中需要重点关注的一类参数。采用时序分析的数据检验技术,可以基于AR 模型较好地预测其振动变化趋势,为技术人员了解航空发动机工况变化和采取养护、维修提供了依据。基于EMD方法的传感器故障诊断,能够准确测得信号输出值的突变,进而明确故障点,也有助于航空发动机检修工作的开展。
1 基于时序分析的航空发动机振动传感器数据验证
1.1 振动测点的设置
利用振动传感器可以实时采集航空发动机的振动参数。为了更加全面、准确地表示发动机的整体振动情况,需要科学布置监测点的位置。本文选择5 个典型截面的垂直和水平方向作为振动测点,具体布置如图1 所示。

图1 航空发动机典型截面位置示意图
发动机振动测试系统中包含的核心设备有压电式加速度传感器、磁电式速度传感器,转速跟踪仪、CXZY-2 型测振仪,以及INV360D型智能信号采集与处理装置。该系统可将前端传感器采集到的速度、加速度、振动位移、振动幅值等信息进行分析处理,从而掌握航空发动机的运行情况,为故障诊断提供依据。
1.2 振动测试内容
本次测试内容主要包括两方面:第一是振动基本参数测量,包括测量压气机、涡轮、附件传动机匣、中介机匣等部位的振动位移、振动速度、振动加速度;轴承转子的振动频率、振动相位、外传力等参数。第二是振动特征参数测量,包括转子- 支撑系统、机匣等部位的固有频率,转子的临界转速、阻尼等。测量方法选择电测法。
1.3 振动传感器数据有效性验证
1.3.1 时间序列分析中动态数据的预处理
在航空发动机起动运行以后,通过振动传感器获取相关参数,然后使用AR 模型处理这些数据。预处理环节主要包括提取趋势项与标准化处理两部分,具体内容如下:第一,提取趋势项。假设振动传感器采集到的数据包含在集合{xt}中,首先进行平稳性检验,根据检验结果判断该结合是否属于非平稳时间序列。如果判断为“否”,则结束分析;如果判断结果为“是”,则提取该集合的非平稳部分,此部分即为趋势项(dt)。从集合{xt}中剔除dt后,可得到平稳时序({yt}),即:

第二,标准化处理。由于{xt}的取值不稳定,为了减小误差、保证结果精度,还需要对{xt}做标准化处理。假设{xt}是长度为L 的有限长平稳时间序列,并且存在非零均值,则可以根据下式求得该集合的均值:

通过上式计算出均值μ 后,再对{xt}中的每个数据进行标准化处理,公式为:

式(3)中,σ 表示{xt}中的各个数据的方差。完成标准化处理后,利用{xt}和{yt}可以建立AR 自回归模型。
1.3.2 构建AR 自回归模型
AR 模型被广泛应用于设备工况在线监视、设备运行故障智能诊断以及设备运行数据预测等方面。对于平稳、正态的时间序列{xt}(t=1,2…n),其AR 模型的表达式为:

式(4)中,{at}表示白噪声序列,σ2表示at的方差,φi表示自回归模型参数。at~NID(0,σ2)中,N 表示在t 为定值时,at为正态分布的N(0,σ2),ID 表示在t 为变量时,每个at相互独立。AR 自回归模型的作用在于能够将任意时刻采集到的振动参数(xt)与前n 个时刻的观测值进行关联,从而更加直观地表示被测物体振动参数的变化趋势,进而为振动故障的识别和预警提供了依据。
1.3.3 基于AR 模型的适用性检验
为了进一步验证AR 模型在航空发动机振动传感器数据验证方面的适用性,在建立AR 自回归模型后还要确定该模型的定阶准则。现阶段常用的定阶准则有3 种,例如基于时间序列的定阶、基于数理统计的定阶,以及基于拟合检验准则的定阶等。本文选择基于拟合检验准则的定阶方法,具体的适用性检验流程为:
对于确定AR(p)模型,首先令阶次p=1。然后利用拟合检验准则进行检索,若p 值≤对应拟合AR 模型的阶次,此时φ≠0;反之,若p 值>对应拟合AR 模型的阶次,此时φ 无限趋近于0。根据拟合检验准则,可以逐渐缩小适用阶次p 的大体范围。需要注意的时,此时p 的阶次较高,因此AR 模型计算结果可能会存在较大的误差。基于此,在拟合检验得到p 值的基础上,还要在[1,p]的区间范围内,继续使用BIC 准则进行重复检验,直到将适用阶次p 的值降低到合适范围,这样计算机分析所得结果的精度才能满足使用需求。
1.3.4 预测结果的有效性检验
基于数学模型推导出航空发动机振动变化预测结果后,还需要对预测结果的有效性进行验证。常用的检验方法有两种,即置信区间检验、平均准确率检验。本文采用置信区间检验,其原理为:假设时间序列{xt}为正态分布,设置信水平为0.05,则真值xi+1将会有95%的概率落入置信区间,此时检验模型可表示为:

式(5)中xi(l)表示在t 时刻向前l 步的预测值。根据模型检验结果,如果用于检验的t+l 时刻真实数据xi+1正好位于置信区间内,则认为该预测结果是有效的;相反,若该数据不在置信区间内,则说明该预测结果无效,需要重新改进模型后继续预测。
2 基于经验模态分解的传感器故障诊断
2.1 经验模态分解(EMD)法的分解过程
目前常用的传感器故障诊断方法有基于冗余技术的故障诊断、基于信号处理的故障诊断以及基于知识的故障诊断等若干种。本文所述的基于经验模态分解的振动传感器故障诊断方法,可以将振动信号分解成多个本征特性函数。然后对函数中的IMF 分量变换求得瞬时幅值、瞬时频率,在此基础上生成Hilbert 谱。通过信号的特征谱分析,能够消除非线性、非平稳信号的干扰,从而进一步提高了传感器故障诊断结果的精确性。基于EMD的振动信号xt分解流程如图2 所示。

图2 EMD 分解的基本流程图
2.2 EMD 方法的应用优势
相比于常规的故障诊断方法,EMD 方法的应用优势主要体现在3 个方面:其一是良好的自适应性。在振动信号分解时,每一个信号都会产生一个对应的基函数。EMD 方法不需要选择基函数,可直接利用IMF 分量获取信号内包含的物理信息。由于IFM分量的个数有限,因此减轻了数据处理的工作量,提高了传感器故障诊断的时效性。其二,由于不同的IMF 分量中包含了多个特征时间尺度,这就使的EMD 可以做到多分辨率分析,避免了随机信号对故障诊断结果的干扰,提升了诊断结果的精确性。其三是良好的调制特性。不同于小波分析,在EMD 方法下分解得到的IMF 分量,其幅值、频率等基本参数是可调的,为EMD 方法处理非线性和非平稳信号创造了有利条件。
3 数据验证技术在航空发动机实测信号中的应用
3.1 传感器发生故障时的数据有效性验证
某航空发动机在满负荷运行状态下,采集器前垂测点的振动信号。此时发动机低压转子的实时转速为8843r/min,高压转子的实时转速为12949r/min。信号采样频率11155.83Hz。为简化数据处理,现从样本点中随机选择1000 个样本点展开分析。这些样本点的时域波形如图3 所示。

图3 传感器故障时信号的时域波形图
直接采集得到的发动机振动信号包含较多的噪声,为保证分析结果精度达标,首先使用了小波分析法进行降噪处理,降噪后的时域波形如图4 所示。
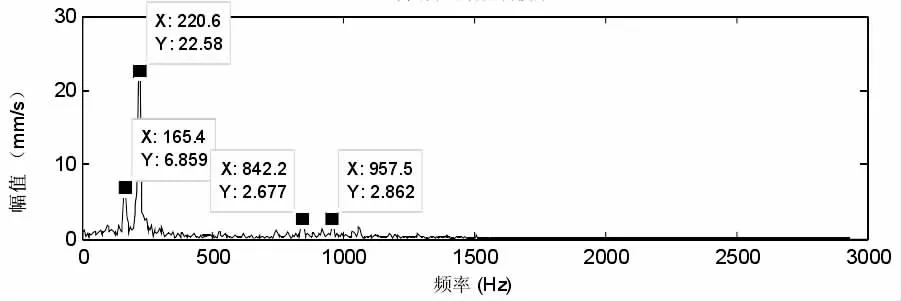
图4 原始信号降噪后的时域波形
对比图3 和图4 可以发现,使用小波分析降噪处理后,振动信号的时域波形相比以往去掉了较多的高频噪声,虽然在低频(200-300Hz)时仍然存在一定的噪声,但是当频率超过400Hz 后,噪声基本上被消除。放大时域波形后可以发现,虽然局部仍然有类似冲击性脉冲的成分,但是并不会对振动信号分析结果产生明显干扰,从而保证了数据验证的有效性。
3.2 基于时间序列建模的数据有效性验证
航空发动机振动冲击故障在不同时间段内表现出的振动信号也会有明显差异,为了验证时间序列建模在故障数据有效性验证方面的应用效果,设计了如下试验:首先在待测的航空发动机上选择6 个采样点。然后使用振动监测仪器在发动机满负荷运行下采集器振动冲击信号。一段时间后,对收集到的数据做统计特性检验。根据计算结果,该段数据的偏态系数(ξ)为1.024×10-10,峰态系数(v)为1.77,随着时间的推移振动信号趋于平稳,符合时间序列建模的基本要求。在此基础上,将所得数据整理得到时间序列集合{xt},按照前文所述方法,对{xt}处理后建立AR 模型,并使用该模型进行拟合预测。
根据拟合预测结果,可以分别得到实测值波形图、AR 拟合波形图。将两种波形在同一频率上的幅值进行比较、作差,即可得到残差向量,将每个频率上的残差向量连线,即可得到残差向量曲线,如图5 所示。

图5 基于AR 模型的残差向量图
由图5 可知,在标记点处残差向量的幅值明显增加,表明此处脉冲特征明显,由此可以推断在A 点(128,20.09)、B 点(322,27.32)等6 个采样点处,该航空发动机受到了脉冲干扰,进而表现为振动故障。
3.3 基于经验模态分解的传感器故障诊断
在求得AR 模型残差向量的基础上,再使用EMD 方法对残差向量做进一步的分解,其目的是提出残差向量中的虚假分量,保证发动机振动故障诊断结果真实、可靠。由于残差向量分解后会得到若干阶次的IMF 分量,而其中的高阶次IFM分量会干扰诊断结果,因此实际分析中只取前2 阶次的IMF 分量,分解后的波形图如图6
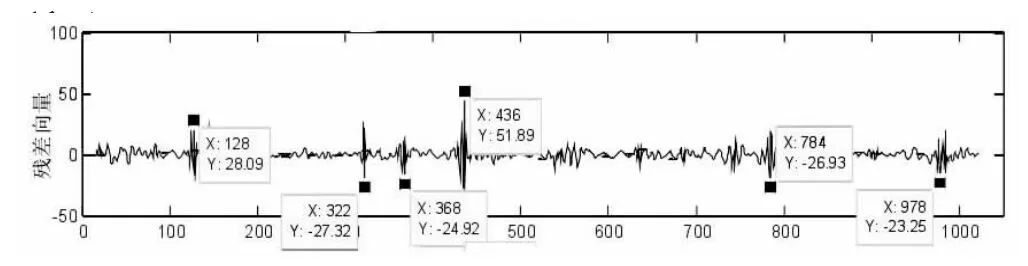
图6 残差向量的EMD 分解结果图
从上图可以发现,使用EMD 法分解残差向量后,在原来出现冲击故障的地方,IMF 分量也表现出来了显著的波动现象。分析其原因,认识是发动机受到脉冲冲击的瞬间,振动信号的输出值产生突变,瞬时频率成倍提升。综合残差向量图和EMD 分解图,在同一采样点处均出现明显跳动的,即可判断为发生传感器故障。
4 结论
利用振动传感器采集航空发动机的振动信号,在此基础上分别使用时序分析技术验证该数据的有效性,可以有效解决误报、错报的问题。对于经过有效性验证的数据,再使用经验模态分析方法,判断其残差向量是否有明显波动,从而准确找到航空发动机的故障点,为技术人员开展发动机的养护、检查以及故障处理提供了技术支持,具有重要的实用价值。
