南海深水半潜式生产平台限位与回接技术*
——以陵水17-2气田“深海一号”能源站为例
2022-06-23汪智峰叶永彪林守强杨学政邱壕威贺佛林
汪智峰 叶永彪 林守强 杨学政 邱壕威 贺佛林 张 凯
(深圳海油工程水下技术有限公司 广东深圳 518000)
随着海上油气田开发逐步走向深水,浮式生产平台的应用越来越广泛,对应的深水系泊系统也逐渐成为研究热点[1-2]。当前深水平台多为浮式平台,主要有浮式生产储卸油装置(FPSO)、半潜式生产平台(SEMI)、单柱式平台(SPAR)以及张力腿平台(TLP)等4种[3-4]。半潜式生产平台因其长、宽尺度相近,遭受的环境力方向性差别不大的特点,采用多点锚泊系统,即与被系泊浮式平台有多个系泊连接点[5-6]。半潜式生产平台作业性能优良,海况适用性好,目前被广泛应用于巴西、北海、墨西哥湾等海域,其中在墨西哥湾海域服役的半潜式生产平台的工作水深均达到了2 000米级,如Independence Hub半潜式生产平台作业水深达2 438 m[7]。1995年,中国第一座半潜式生产平台“南海挑战号”在流花11-1油田投产,已服役二十余年;2021年,陵水17-2气田半潜式生产平台——“深海一号”能源站正式投入运营,标志着中国海洋工程制造业逐步向深水浮式生产平台等高端装备业进军[8]。由于中国现有浮式生产平台主要以FPSO为主,锚泊系统主要采用锚链+钢缆+锚链的形式,作业水深均在500 m以浅,国内深水半潜式生产平台海上安装技术能力与工程经验相对欠缺。
本文基于中国自主研发建造的首个十万吨级深水半潜式生产储油平台——“深海一号”能源站的海上安装问题,重点阐述深水半潜式生产平台限位与回接关键技术,以期为中国南海深水油气田浮式生产平台的安装提供借鉴。
1 “深海一号”能源站系泊系统概况
“深海一号”能源站位于陵水17-2气田,所在海域水深约1 422 m。该平台由上部组块和船体两部分组成,为四立柱半潜式生产储油平台[8]。平台采用半张紧式系泊系统进行锚固(图1),整个系泊系统位于以平台为中心约2 000 m的半径范围内,所

图1 “深海一号”能源站系泊系统
在区域水深1 395~1 448 m。系泊系统由4组锚固系统构成,每组4条系泊缆连接于4根锚基础上,每组内相邻系泊缆之间夹角为4°。锚基础采用打入式锚桩作为锚固方案,单根系泊缆由锚基础-锚链-底链-下端聚酯缆-连接链-上端聚酯缆-连接链-平台链组成[9-10]。
“深海一号”能源站系泊锚腿组成及技术参数见表1,可以看出聚酯缆在水中的单位长度质量比在空气中的单位长度质量减轻了75%,聚酯缆在水中的单位长度质量仅为锚链的2.6%,且强度质量比大。深水系泊锚腿采用的聚酯缆由多股聚酯绳外加编织保护套组成,绳眼处及聚酯缆末端通过涂层包裹保护,外侧红色条纹用于监测聚酯缆水下扭转程度,绳眼处固定尾筒通过卸扣连接锚链。锚桩链和海底链之间采用水下快速连接器(Subsea Mooring Connector,SMC)连接,锚桩链通过卸扣与桩锚的吊耳连接。
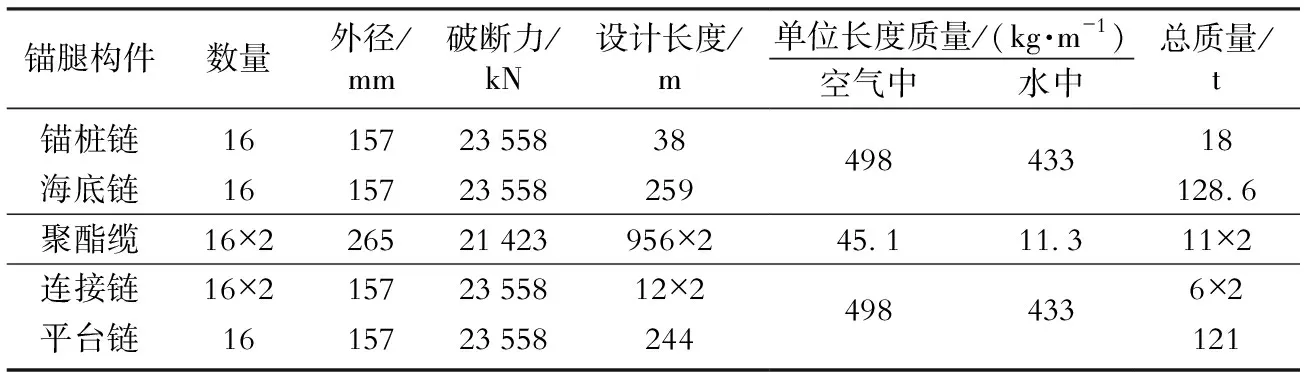
表1 “深海一号”能源站系泊锚腿组成及技术参数Table 1 Component and technical parameters of mooring leg for “Deep Sea No.1” energy station
2 深水半潜式生产平台限位与回接技术挑战
2.1 十万吨级大尺度半潜式生产平台高风险限位作业的挑战
“深海一号”能源站主尺度为91.5 m × 91.5 m,排水量达10.5×104t。平台湿拖至陵水17-2气田现场后,由拖航模式转换为限位模式,在前4根系泊锚腿回接完成前,平台仅依靠4艘带DP功能的大马力拖轮进行控制,受风、浪、流影响,平台会产生较大运动,一旦其艏向或位移超过设定的安全区域,则存在平台与作业船发生碰撞的风险。
2.2 南海恶劣天气对平台安全、快速回接作业的挑战
“深海一号”能源站回接时,施工现场有4艘限位拖轮对平台进行限位,2艘主作业船进行系泊锚腿的回接作业。平台与船舶间的作业空间狭小,不同系泊锚腿回接时,限位拖轮与主作业船的船位均不相同,且主作业船需频繁靠近平台作业。因此,半潜式生产平台回接对海上天气的要求非常高。考虑到南海恶劣天气的潜在影响,“深海一号”能源站回接时,需要在1周内完成前8根系泊锚腿的回接,以保证平台及施工人员的安全。对系泊锚腿回接期间发生的潜在恶劣天气,需提前进行分析评估并制定相应的应急预案。
2.3 深水聚酯缆打捞作业须防扭转防拖拽的挑战
“深海一号”能源站16根聚酯缆锚腿于2020年完成预铺设并湿存在海底,平台在2021年拖航至现场并完成测试后,作业船需将湿存于近1 500 m水深的聚酯缆锚腿打捞至水面。由于聚酯缆存在不耐磨、易受损等缺点,在施工过程中存在扭转与缠绕的风险,以及拖拽造成的外皮损伤等风险;同时,聚酯缆在水中重量轻,易受底流影响,打捞、传递及回接过程工况复杂。
3 深水半潜式生产平台限位与回接总体方案
3.1 总体实施方案设计
“深海一号”能源站于2021年2月5日湿拖至陵水17-2气田现场,由于半潜式生产平台回接作业处于南海冬季季风期,海上气象条件复杂多变,为保障半潜式生产平台的安全,需要在最短时间窗口内完成平台16条系泊锚腿的回接,实现平台的系泊定位。因此,制定了“HYSY291”与“HYSY681”双作业船进行锚腿回接的总体方案。
“HYSY291”船是中国第一艘大型深水锚系安装船,总长109.4 m、型宽24 m、型深9.8 m,“HYSY681”船是具有国际先进水平的大马力深水三用工作船,总长93.4 m、型宽22 m、型深9.5 m。两船均为DP2动力定位船,系柱拖力大于300 t,可搭载3 000 m级工作型ROV(水下机器人),并配备了一系列锚系作业的专用设备,包括1套500 t锚系处理绞车系统、2套船尾800 t鲨鱼钳系统,1套700 t(“HYSY291”船)/750 t(“HYSY681”船)艉滚筒与2套轨道吊等。经可行性评估,“HYSY291”船与“HYSY681”船在船舶性能和关键设备能力方面满足“深海一号”能源站回接作业要求。
半潜式生产平台16根系泊锚腿回接顺序遵循如下原则:第一根系泊锚腿回接,主作业船位于上风向位置;为确保平台受力均衡,系泊锚腿回接顺序采用对角原则;由于锚链轮海固向平台内侧倾斜,因此单组系泊锚腿需从外向内回接。
在进行平台系泊锚腿传递与回接作业时,通过4条大马力限位拖轮分别在平台东北、东南、西北、西南4个方位进行限位,完成前4根锚腿回接后,可根据现场海况与半潜式生产平台限位情况进行综合评估,解脱部分或全部限位拖轮。
3.2 总体安装工艺流程
“深海一号”能源站限位与回接作业可划分为4个阶段:①平台抵达现场后开始压载,完成限位模式转换及限位测试等准备工作;②主作业船打捞湿存在海底的系泊锚腿,移船靠近平台准备进行锚腿的传递;③主作业船与半潜式生产平台配合,进行锚腿的传递与回接作业;④使用半潜式生产平台的锚机与止链器进行16根聚酯缆锚腿的预张紧。限位及回接施工工艺流程如图2所示。

图2 “深海一号”能源站限位及回接工艺流程
4 深水半潜式生产平台限位与回接关键技术
4.1 平台限位索具预安装及测试技术
“深海一号”能源站湿拖至陵水17-2现场后,平台需要从拖航模式快速无缝衔接转换为限位模式,之后立即进行锚腿回接作业。由于平台拖航索具与限位索具的配置不同,且限位索具无法在平台湿拖至现场后进行安装,因此,限位索具须在平台湿拖前进行安装,同时,限位索具的设计须满足平台湿拖至现场后方便快速地传递给限位拖轮的要求。
基于以上需求,研究了一套完整的半潜式生产平台限位索具预安装及测试技术:①在平台4个立柱最外侧EL+41.8 m位置各增设一个限位拖带点,拖带点工作载荷为1 960 kN;②按图3、4所示进行平台限位索具的设计及配置,限位索具的设计须满足平台限位最大计算载荷要求,长度须满足从拖带点延伸至EL+59 m锚机甲板,并满足限位索具海上传递时限位拖轮与平台保持15~20 m安全距离的要求;③平台湿拖前,完成限位索具的安装,并使用平台吊机进行限位索具传递测试,确保吊机跨距满足限位索具传递要求,且吊机移动范围内没有干涉。
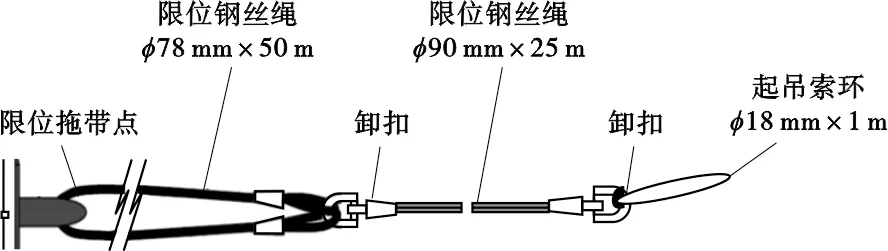
限位拖带点、卸扣的安全工作载荷为1 960 kN
4.2 十万吨级半潜式生产平台限位技术
1) 平台由拖航模式至限位模式的转换。
平台拖航采用湿拖方案,拖航时平台吃水15 m,拖带点在平台基线以上14.4~18.0 m处。而限位模式下,平台需调整吃水至33 m左右,拖带点在平台基线以上41.8 m处。从拖航模式转换为限位模式,拖航的3条拖轮都需要先解脱,再更换拖带点,重新带拖。根据天气情况及拖航的方向,设定主风流为东北来向,自西向东拖带移动,拖航模式到限位模式的转换步骤如图5所示。
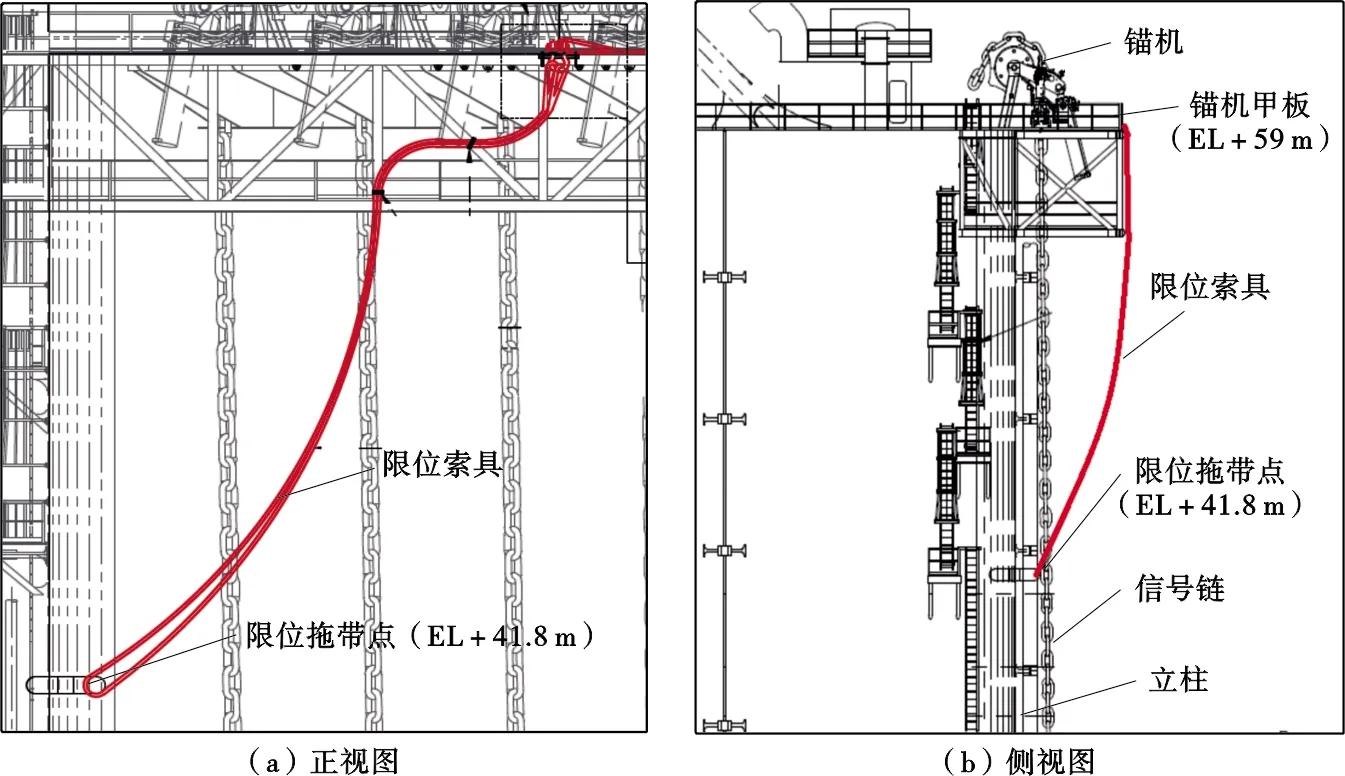
图4 “深海一号”能源站限位索具预安装位置

图5 “深海一号”能源站拖航模式与限位模式
2) 平台限位计算分析。
平台限位计算分析旨在计算不同海洋环境条件以及拖轮限位状态下平台的运动与限位缆绳张力,以判断平台限位布置方案是否满足系泊锚腿回接时的运动接受标准。同时,通过计算分析,对限位拖轮的马力及系柱拖力提出要求,以便进行限位拖轮的选型。
锚腿回接顺序确定后,采用Orcaflex建立模型,对前4条锚腿回接时平台的限位工况进行模拟和计算分析。其中风浪方向从0~360°(取正北向为0°),每30°进行一次计算,有义波高Hs考虑2.0 m;第2~4条锚腿回接时考虑平台向回接锚腿方向偏离-20、0与20 m。保守考虑,选取每条锚腿回接时的最恶劣海况,即风浪方向为使限位拖轮带力最大方向,且处于仅2条拖轮带力状况下的限位工况。
基于上述工况,计算得到不同锚腿回接时平台限位所需最大合力及方位情况(表2)。根据平台限位所需最大合力、平台合力方位及锚腿回接方位,进行限位拖轮艏向设计和系柱拉力的计算,结果表明,在有义波高Hs=2.0 m时,限位拖轮系柱拉力均满足平台限位要求。结合计算分析结果对平台限位操作给出如下建议:当海况较好时,所需拖轮系柱拉力较小,可将平台向即将回接锚腿的方位偏移20 m,以利于作业船靠近平台进行锚腿的传递;当海况较差时,所需拖轮系柱拉力增大,可将平台位置控制在设计中心进行锚腿回接。
另外,考虑南海冬季季风恶劣天气对平台限位的影响,针对回接1条锚腿,回接2条锚腿与回接3条锚腿等不同应急工况进行了计算评估,给出了允许的极限海况、平台中心偏移距离、限位拖轮位置与拉力等数值以及锚腿在水中状态等。以回接2条锚腿时平台限位计算分析为例,此情况下的极限工况为风浪方向为西南,Hs=5 m,风速为20 m/s,海流流速为0.5 m/s。限位拖轮控制平台东南、西北方向位移,平台偏移不超过210 m,拖轮系柱拉力约为980~1 470 kN,锚腿在水中状态良好。

表2 “深海一号”能源站限位计算分析结果Table 2 Calculation results of “Deep Sea No.1” energy station station-keeping
3) 平台安全区域类型划分与限位能力测试。
根据平台限位计算,并结合作业船与平台安全作业距离的要求,本次作业将平台艏向偏移的±15°作为限位可作业区域,±15°至±20°作为警戒区域,超过±20°则通知相关方撤离。平台横向、纵向位移均设定为±20 m作为可作业区域,±20 m至±30 m为警戒区域,超过±30 m则通知相关方撤离。
为确保平台限位作业的可靠性,保障海上作业安全,应在平台正式实施限位作业前,在设计的限位区域内进行限位测试,测试主要内容包括:①保持平台当前艏向位置30 min,进行控制能力测试,测试要求各拖轮发挥功率应不大于50%;②在预定艏向上做向左、向右分别旋转10°的艏向控制能力测试,艏向稳定10 min,测试要求拖轮发挥功率应不大于50%;③协调拖轮动作,使半潜式生产平台横向东、向西、向北与向南分别偏移20 m并保持10 min;④选择某一拖轮在最大功率下,迅速停车,其他拖轮保持当时状态,测试平台偏转10°和平移20 m所需时间。当以上限位测试结果满足平台正式限位的各项要求时,才允许进行正式的限位作业。
4.3 深水聚酯缆锚腿打捞与回收技术
“深海一号”能源站16根聚酯缆锚腿于2020年完成预铺设并湿存在水深近1 500 m的海床,湿存前在平台链末端提前预装了一套锚腿打捞索具。为防止聚酯缆锚腿在打捞过程中因受力发生扭转,结合以往工程经验教训,本次作业采用84 mm小尺寸引链配合吉普赛轮替代锚系绞车进行聚酯缆及锚链的打捞回收,开始打捞平台链时,作业船下放引链至锚腿平台链的湿存地点,使用ROV在海底辅助挂钩连接。绞车持续回收平台链至甲板,作业船同步沿铺设路径移船(图6a,过程1~7直线路由为作业船开始打捞锚腿至平台链完全回收至甲板的过程)。结合计算分析,当平台链全部离开海床时(过程1),引链受力最大;当平台链顶端回收至水面时(过程7),回收索具受力最大。在Hs=2.0 m时,引链最大载荷3 920 kN,回收索具最大载荷1 764 kN,均在索具的安全工作载荷范围内。此外,在锚腿打捞回接的开始阶段,着泥点与入水点的水平距离可保持在不超过100 m,当回收至锚腿着泥点进入甩弯段时(过程3),需要减小着泥点和入水点的水平距离至50 m,以减少聚酯缆在水中的悬链线长度并降低聚酯缆受底流影响发生摆动,避免聚酯缆在海床上产生拖拽,同时ROV在水下实时监控锚链及聚酯缆的状态。
平台链回收后解除回收索具和打捞索具,重新连接引链和平台链,作业船逐步向平台靠近,并沿着锚腿湿存路由甩弯段切线移船拉直锚腿(图6b),此时锚腿在作业船船尾悬挂点至系泊锚腿与海床触底点的水平投影最大距离为943 m,锚腿带力1 270 kN,船体受锚腿拉力水平分力为72.5 kN,均在聚酯缆、锚链及作业船安全载荷范围之内,满足作业条件。

图6 “深海一号”能源站系泊锚腿水下打捞与拉直
由于16条聚酯缆系泊锚腿预铺设湿存在海底的路由有所不同,因此需针对每条聚酯缆锚腿的回收设计移船方案。以西北侧第4组锚腿为例,4条聚酯缆锚腿湿存在海底的路由如图7所示,根据计算,对于#13、#14、#15锚腿,作业船回收平台链至甲板前,着泥点可抵达甩弯段,在此情况下可采用切线移船进行回收锚腿,直到甩弯段聚酯缆全部离开海床。对于#16锚腿,作业船回收平台链至甲板时,着泥点仍未抵达甩弯段,如果直接拉直势必造成聚酯缆在海底发生拖拽,此种情况下需使用引链和鲨鱼钳配合继续回收平台链约150 m直至着泥点抵达弯段,再采用切线移船使聚酯缆安全离开海床。

图7 “深海一号”能源站#13~#16系泊锚腿预铺设路由
5 结束语
陵水17-2气田半潜式生产储油平台——“深海一号”能源站于2021年2月6日拖航至气田现场,基于国内自有锚系作业船“HYSY291”“HYSY 681”双船进行回接作业。2月17日顺利完成了16根聚酯缆锚腿的回接作业,3月1日成功完成聚酯缆张紧与平台精准就位,平台最大位移1.45 m@232.4°(偏离设计中心距离1.45 m,偏离方向 232.4°),满足接收标准,16条锚腿、锚桩、海底链、聚酯缆、卸扣、平台链均状态良好。
该平台限位与回接作业的顺利实施,验证了深水半潜式生产平台限位与回接技术的可行性与可靠性。该技术的成功应用填补了国内海洋石油工程技术领域的空白,达到了世界同类工程技术的先进水平,使中国初步建立了1500米级深水半潜式生产平台的安装技术能力、船舶装备保证能力与施工组织能力,为今后中国南海深水浮式生产平台的安装提供了技术储备和经验借鉴,对中国南海深水油气田的开发具有重要意义。