基于CCPM-PERT的卫星在轨测试进度管理方法研究
2022-06-23杨日新白洪波黄彦霖
杨日新 白洪波 黄彦霖
(1.航天工程大学,北京 101416;2.61618部队,北京 100094;3.首都经济贸易大学,北京 100025)
0 引言
卫星在轨测试是在卫星入轨后、交付用户前对卫星功能与性能开展的各项测试与试验,是卫星验收最重要的环节。卫星在轨测试一是要验证卫星的功能与性能是否满足设计标准;二是要确认卫星是否具备在轨执行任务的能力,它是卫星能否交付用户的最终测试环节[1]。在开展卫星在轨测试的过程中,试验进度管理是指挥和控制卫星在轨测试的重要抓手,其作用体现在两个方面:一是以试验进度为基础制订明确的试验计划,为卫星在轨测试的组织和实施提供依据;二是在卫星在轨测试实施过程中,根据已制订的试验进度计划对试验全过程进行跟踪控制,确保卫星在轨测试目标能够按计划达成。卫星在轨测试中,进度管理不仅需要科学合理、便于实施的进度计划,还需要有效的进度控制手段应对各种因素导致的进度偏差。
本文旨在介绍一种全新的进度管理方法与流程,通过融合关键链法(Critical Chain Project Management,CCPM)和计划评审技术(Program Evaluation and Review Technology,PERT),编制卫星在轨测试进度计划,提供进度控制方法,并以某型遥感卫星在轨测试为例验证该方法的可行性和有效性。
1 卫星在轨测试进度管理特点与问题分析
卫星工作环境的特殊性以及卫星在轨测试的复杂性,使卫星在轨测试进度管理具有以下三个显著特点。
1.1 不确定性大
卫星在轨测试可以分为卫星平台试验、有效载荷试验、星地一体化指标试验三大类,各类试验包含数十个具体的试验项目[2]。在进行具体的试验项目时,要提前考虑卫星在轨运行、卫星地面应用系统、站网接收资源、地面试验场等诸多因素影响,某一因素的影响都可能导致一次试验的失败。大量的试验项目和诸多的影响因素共同作用,造成卫星在轨测试具有很大的不确定性,因此很难准确估计卫星在轨测试的工期。
1.2 管理难度大
与卫星地面试验主要依托卫星研制和总体部门不同,卫星在轨测试涉及卫星用户方、地面应用系统研制方、卫星分系统级和总体研制方等,依托各相关方协同开展卫星在轨测试。一方面,相关方众多;另一方面,各试验项目之间也存在一定的交叉和关联。当某一个试验出现问题时,可能需要各相关方逐一进行排查,导致整个卫星在轨测试停滞或拖延。
1.3 影响卫星寿命
卫星设计寿命是卫星的主要技术指标之一。以近地轨道观察卫星为例,其设计寿命一般为2~5年,受到太空复杂环境的影响,其使用寿命往往短于设计寿命。而卫星在轨测试是在卫星入轨工作后进行的,因此在轨测试将直接消耗卫星使用寿命。假设一颗卫星的使用寿命为3年,如果卫星在轨测试进行6个月,则会消耗卫星1/6的寿命,这在很大程度上影响了卫星的使用价值。因此,卫星在轨测试需要在一定的限期内完成。
传统的卫星在轨测试进度管理通常采用里程碑计划,即明确卫星在轨测试的阶段目标和总目标并规定相应的时间节点;通过定期组织工作会议掌握试验进度并对产生的进度偏差进行纠正。这种模式下的试验进度管理较为粗犷,存在三个方面的突出问题:①没有精细的进度计划。以简单的“试验目标+时间节点”作为进度管理的依据,导致进度计划执行时自由度过大、进度计划执行松散。②缺乏科学评估。在时间节点的安排上根据以往经验和任务时限,难以评估进度计划的可靠性,放大了卫星在轨测试的不确定性。③缺少有效的控制手段。由于进度计划本身较为简单,当卫星在轨测试出现进度偏差时,进度计划调整的空间非常有限,往往只能通过延期来解决问题,同时无法估计局部的进度偏差对在轨测试总进度造成的影响。
2 进度管理方法回顾
进度管理是现代项目管理的重要组成部分,目前已有一些较为成熟的进度管理方法,如甘特图法、关键路径法(CPM)、计划评审技术(PERT)等。近年来,基于约束理论(TOC)发展形成的关键链法(CCPM)成为进度管理研究的热点。这些方法都广泛应用于各类工程与项目的进度管理,且各具特点。
2.1 甘特图法
甘特图(Gantt Chart)又称为横道图或条线图,是进度管理常用的方法之一。在甘特图中,纵轴表示工作内容,位于甘特图左侧;横轴表示进度与工作持续时间,位于甘特图上方。甘特图示例如图1所示。
甘特图采用一种简单明了的方式描述整个项目过程,易于管理者和参与者理解和把握整个项目的情况,但其缺点也较为明显:①无法表达各项工作之间的相互关系;②无法指出影响进度的关键所在以及进度偏差导致的后果;③无法表示工作中的不确定性,管理者无法利用甘特图进行敏感性分析。这些特点决定了甘特图法通常适用于小型项目,难以满足复杂项目的管理需要[3]。
2.2 CPM/PERT方法
关键路径法(CPM)和计划评审技术(PERT)同属于网络计划技术,都是利用网络计划对项目进度进行安排和控制,以保证实现预定的目标。
其中,关键路径法是通过对网络计划中项目活动时间参数的计算,找到网络计划的关键路径,进而完成进度计划安排的一种方法[4]。如图2所示,在网络计划中,路径是指从网络计划的起点出发至终点结束的任意一条连贯的线路,关键路径是指所有路径中工作时间累加最长的路径。关键路径决定了整个工程项目的工期;关键路径上的活动成为关键活动,关键活动延误将导致整个工程项目的延误。因此,不论工程项目多么庞大复杂,通过管理控制关键路即可实现对整个工程项目的进度管理。
复杂的工程项目往往具有不确定性,难以估计工程项目活动时间,而关键路径法无法解决这个问题,因此需要一种不确定型网络计划技术区弥补关键路径法的缺陷,计划评审技术应运而生。计划评审技术与关键路径法在基本概念和计划网络图绘制上基本相同,两种方法的主要区别在于对活动时间的估计与分析[5]。当工作没有准确的持续时间时,要根据以往的数据统计或工作经验给出工作持续时间的三种估计:
(1)乐观时间to:表示工作没有受到任何负面影响,在最顺利的状态下完成工作所需要的时长,即工作的最短完成时间。
(2)最可能时间tm:表示在正常情况下完成工作最可能需要的时长。
(3)悲观时间tp:表示工作受到负面影响,在最困难的情况下完成工作所需要的时长,即试验活动的最长完成时间。
考虑到工作时间的不确定性,计划评审技术假定每个工作时间是一个随机变量,且服从Beta分布。通过概率统计的方法,得到活动持续时间的期望值te和表示活动持续期望时间值偏差大小的方差σ2。公式如下
这种方法不仅为进度计划提供了依据,还为管理者的决策提供了支持。但是,由于其基本假设导致其估计精度一般,更趋向于一种评价结果,而不是一种有效的管理手段,工程项目实施过程中的进度控制没有得到解决[6]。
3 基于CCPM-PERT的进度管理方法
3.1 方法描述
1996年,Goldratt博士把约束理论(Theory of Constraints,TOC)引入项目管理领域,提出了关键链和缓冲区的概念方法[7],其主要思想包括:①用同时考虑项目活动逻辑关系和项目资源约束的关键链CC(Critical Chain)代替原先的关键路径,进行进度计划的编制;②考虑人的行为因素,压缩各个项目活动的安全时间,将压缩出来的时间作为缓冲区,分别安排在网络计划中的合理位置,以消除不确定因素并聚合风险,使项目能够按照进度计划稳步进行[8]。
关键链缓冲管理方法在进度计划中加入了三种缓冲区,分别是项目缓冲PB(Project Buffer)、接驳缓冲FB(Feeding Buffer)和资源缓冲RB(Resource Buffer)。如图3所示,项目缓冲位于关键链的尾部,其作用是保证项目能够在规定时间内完成;接驳缓冲位于关键链与非关键链的结合位置,其作用是保证非关键链上的活动能够在规定时间内完成;资源缓冲则是考虑受限资源,其作用是保证关键链上的活动能够得到足够的资源供应。
为了克服卫星在轨测试的不确定性,同时解决计划评审技术无法提供有效控制手段的缺陷,本文基于CCPM关键链法,提出一种结合PERT计划评审技术的进度管理新方法,其主要思路是:利用PERT计划评审技术的三点估计(to,tm,tp),以乐观时间to作为进度计划基准工期得到关键路径,这样可以克服“帕金森定律”和“学生综合症”对进度造成的延误。再分别以三个估计时间计算关键路径总长并得到缓冲区比例系数KB,通过比例系数KB计算项目缓冲PB和接驳缓冲FB的大小,完成进度计划并以缓冲区对进度进行控制,该方法的实施步骤如下:

步骤3:计算缓冲区比例系数KB。利用三点估计时间to,tm,tp,分别计算关键链CC的总长度。式(1)为比例系数KB的计算公式,从整个卫星在轨测试工程进度安排考虑,确定缓冲区的比例系数。式(1)如下
(1)
步骤4:利用缓冲区比例系数KB计算项目缓冲PB和接驳缓冲FB。式(2)、式(3)中,CC表示关键链,NCC表示非关键链。在计算缓冲区大小后,将缓冲区插入网络计划中的相应位置。具体公式如下
(2)
(3)
步骤5:在卫星在轨测试的实施过程中,跟踪试验进度情况,当出现进度偏差时,管理者通过分析研判,利用缓冲区对进度计划进行控制和调整。
3.2 实例运用
以某型遥感卫星开展在轨测试为例,分别运用PERT计划评审技术和本文提出的CCPM-PERT方法制订在轨测试进度计划,比较两种方法的所得到的时间总长。该型遥感卫星在轨测试要完成四大类共22个试验项目[9],三点时间估计和时间参数计算见表1,网络计划图见图4。
3.2.1 PERT计划评审计划
在运用PERT计划评审技术制订进度计划时,根据三点时间估计并计算期望时间te,各试验项目的期望时间见表1。计算得出期望时间te后,找到网络计划中的关键路径L→M→N→O→P→Q→S→T→U→V,关键路径长度为

表1 三点时间估计和时间多数计算
TCPM=7.5+15.7+5.8+6.0+15.7+7.5+10.6+7.5+19.8+20.3=116
关键路径的标准离差为
3.2.2 CCPM-PERT方法
在运用CCPM-PERT方法制订进度计划时,以三点估计时间中的乐观时间to确定关键链CC,关键链为L→M→N→O→P→Q→S→T→U→V,关键链长度为
TCC=5+12+4+4+12+5+8+5+14+16=85
再以三点估计时间计算缓冲区比例系数KB
得到缓冲区比例系数KB之后,计算缓冲区的大小,见表2。
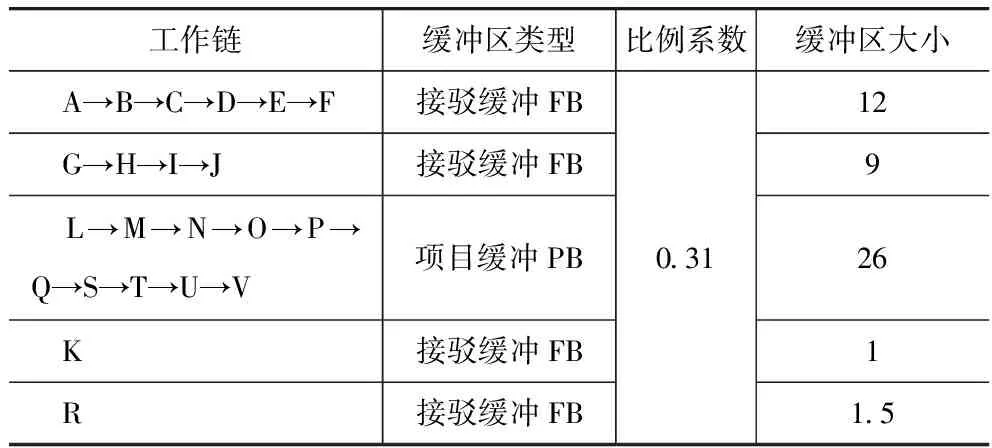
表2 缓冲区计算
将项目缓冲PB和接驳缓冲FB分别插入对应位置,得到网络计划图,如图5所示。
比较两种方法得到的总工期,运用PERT计划评审技术制订进度计划,总工期为116天;运用CCPM-PERT方法制订进度计划,基本工期85天,项目缓冲PB为26天,总工期111天。通过对比可以发现,CCPM-PERT方法具有以下优点:①运用该方法制订卫星在轨测试进度计划可以获得更短的工期;②该方法利用乐观时间to作为基本工期,可以减少“帕金森定律”“学生综合症”等因素造成的时间浪费;③通过设置缓冲区可以充分克服卫星在轨测试的不确定性,确保试验计划能够按时完成;④管理部门可以利用缓冲区对卫星在轨测试进度计划的实施进行有效控制。
4 结语
本文基于关键链法,利用计划评审技术中的三点估计确定关键链和缓冲区的大小,弥补了单纯运用计划评审技术制订进度计划时存在的缺陷,同时发挥了关键链法的优势,克服了卫星在轨测试的不确定性,缩短了卫星在轨测试工期,并为管理者提供了进度跟踪与控制的手段,为卫星在轨测试的进度管理提供了新的思路和方法。
由于卫星在轨测试的特殊性,资源约束对进度影响较小,本文在运用关键链法时没有引入资源缓冲RB,仅考虑时间作为唯一的约束条件。随着航天事业的不断发展,卫星发射的频率和数量都在不断上升,对卫星在轨测试的要求也会不断提高,要运用关键链法对卫星在轨测试进行管理还需要探索更为合理的缓冲区计算方法,进一步提高卫星在轨试验进度计划的准确性和有效性。
