飞机导光板自动调光系统的滑模控制方法
2022-06-23刘洪德邹浩彦赵立怡董科锐
刘洪德, 邹浩彦, 赵立怡, 董科锐
(1.航空工业第一飞机设计研究院,西安 710000; 2.空装驻西安地区第一军事代表室,西安 710000;3.航空工业西安飞机公司,西安 710000)
0 引言
飞机座舱照明为机组人员提供必要的光环境,使其能判读信息、操纵机上设备。随着科技发展,现代飞机更加注重飞机座舱照明的作用,为了优化座舱照明设计,从而提升视觉功效、降低照明能耗、符合视觉及心理舒适度,并减轻飞行员操作负担,飞机座舱自动调光技术也应运而生。
针对飞机座舱导光板自动调光技术的研究主要围绕系统架构设计、调光控制方法、传感器布局等方面展开。基于CAN总线通信网络的系统架构是研究较多的一类飞机座舱导光板自动调光系统架构,可实现分区调节控制、同类照明设备同步受控的设计目的[1-4];围绕调光控制方法,设计人员探讨了自适应控制、模糊控制等控制方法在飞机座舱自动调光领域的应用[5-7];考虑到优化自动调光控制效果、满足飞机驾驶舱自动调光系统中环境光检测需要,国内外学者针对传感器布局方式进行了研究,提出了“照度最大值”原则,并通过SPEOS光学仿真等手段验证了对角布局的合理性[8-12];为改善心理和视觉舒适度,出现了采用自动亮度调光曲线、光色性能、色温、夜视兼容性等技术参数优化座舱照明和调光性能的方法,并进行了实验验证[13-16]。
现行飞机座舱导光板自动调光控制技术通过光敏传感器采集光环境照度反馈给控制器,控制器根据调光曲线将光环境照度映射为PWM波占空比等控制量并施加给受控对象,从而跟随光环境变化实现导光板的自动调光。然而,调光曲线需要在前期实验中获取,需要耗费人力、物力,且调节效果对人眼舒适度的满足性有待提升。
滑模控制是一种非线性控制,对干扰不敏感、响应快速、物理实现简单。本文对滑模控制在自动调光控制系统中的应用进行研究,其具有以下优点:
1)适应现行飞机座舱导光板自动调光控制系统架构,完成采用滑模控制方法的控制器设计,并完成控制原理的理论推导及控制对象的建模;
2)依据GJB 455-1988中的导光板对比度要求,以控制导光板稳定跟随字符对比度规定值为控制目标,具有无需依赖调光曲线的特点;
3)借助Simulink环境进行控制器调参,在仿真环境中完成系统搭建、控制效果验证分析,方便依据人眼舒适度进行控制器参数优化。
1 系统架构
1.1 自动调光控制系统架构
现行飞机座舱导光板自动调光控制系统主要由光敏传感器、调光控制设备、受控设备组成。
光敏传感器依据“照度最大值”原则分区布置在操纵台和仪表板上,调光控制设备接收光敏传感器采集的光环境照度信息,并根据照度值实时调整输出给相应区域导光板的亮度控制信号,从而根据座舱光环境的变化,进行导光板亮度分区控制,实现导光板亮度的受控调节。
导光板自动调光控制系统架构如图1所示。

图1 自动调光控制系统架构
本文设计一种采用滑模控制方法的控制器,调节导光板面板上的字符等标识信息,使之保持在符合人眼视觉功效的对比度水平,以满足可读可视要求。
1.2 控制系统工作原理
现代飞机座舱中,普遍采用导光板照明方式。导光板通常用白色标识字符信息,用灰色作为背景色,导光板LED点光源转换为面均匀的面光源并从白色字符标识区域透射而出,点亮字符,而背景区域光线不能通过,因此,通过调节导光板LED光源亮度即可调节面板上的字符标识信息的亮度,从而调控导光板字符信息的可读可视性。
导光板上的白色字符和灰色背景材质特性使其能对光线进行漫反射。白天,座舱中的光环境照度较高,白色字符对外部光线进行漫反射,字符信息即可被人眼辨识,因此可关闭导光板,降低能耗;夜晚,座舱中的光环境照度较低,因此,需要点亮导光板从而点亮控制面板上的白色字符信息。
导光板上的白色字符和灰色背景具有不同的漫反射系数,在环境光作用下,当导光板点亮时,其字符与背景的对比度C可表示为
(1)
式中:F为白色字符透光亮度;A为光环境照度;KF为白色字符漫反射系数;KB为灰色背景漫反射系数。
根据GJB 455-1988第2.5节对导光板标记与背景之间对比度的要求,标记颜色为白色、背景颜色为灰色时,对比度规定值C0为7。因此,为保证导光板字符标记信息维持合适的对比度等级,控制系统需调节导光板LED光源亮度满足
(2)
式中:F0为白色字符透光亮度目标值;C0为导光板对比度规定值。
根据控制原理设计控制系统,如图2所示。控制系统由观测器、滑模控制器、导光板传递函数3个模块组成。其中,e为位置误差,u为滑模控制器输出的控制量。

图2 控制系统框图
观测器对光环境照度A进行观测及阈值判断,当光环境照度A大于阈值A0时,判断照明模式为白天,此时通过座舱中自然光的漫反射即可保证字符信息被人眼辨认,因此,断开滑模控制器输出端,关闭导光板;当光环境照度A不大于A0时,判断照明模式为夜晚,此时接通滑模控制器输出端,并根据环境光变化调节导光板LED光源亮度,确保字符信息保持在预期的对比度,以便被人眼清晰辨认。
因此,对式(2)进行调整,其输入输出满足关系
(3)

滑模控制器根据字符亮度目标值与亮度实际输出值的偏差调整控制量,对受控对象进行切换控制,使得导光板的亮度实际输出值向亮度目标值趋近,不断缩小两者间的偏差。
2 控制器设计
根据导光板调光曲线和输入输出关系,受控对象的传递函数为
(4)
式中,p1,p2,p3和b为与导光板调光曲线相关的特征参数,依据此次所选导光板调光曲线输入输出关系特点,p1,p2,p3和b分别取值为0.014 9,0.018 8,5.000 2,1.000 0。
控制系统状态方程为
总的来说,该算法占用资源少、处理速度快,尤其适用于在图像目标的检测场合中实现硬件加速,因此该算法不仅适用于在线纸病检测系统,同时也适用于其他实时性较强的应用中,可以针对不同的应用场合灵活控制分块的数量,完成对图像目标的检测和提取,以提高系统的实时性。
(5)
式中:x为控制系统的状态量,在本控制系统中,导光板亮度输出F=x;u为控制器输出的控制量。
控制系统设定值与实际值偏差表示为
e=F-x(1)
(6)
(7)

定义滑模切换面为
(8)
式中,c为滑模切换面参数。
定义Lyapunov函数
V=s2
(9)
(10)
因此,设计滑模控制率为
(11)
3 仿真分析
在Simulink模块中搭建基于S函数的滑模控制器和导光板传递函数。系统模型如图3所示。

图3 导光板自动调光控制系统模型
取参数η=5000,分别取不同的滑模切换面参数c,计算控制系统的阶跃响应,如图4所示。
图4 系统阶跃响应
从控制系统的阶跃响应特点可知,当参数c取值为15时,输出值无超调且趋近目标值的速度最快,响应时间最短。当参数c取值进一步增大,响应出现超调。因此参数c取值15。输入图5所示光环境照度变化曲线,函数表达式为A=40sin 0.3t,系统输出如图6所示的导光板对比度跟踪曲线。
图5 光环境照度变化曲线

图6 c取值为15时系统输出值跟踪误差
图6中,初始时刻导光板亮度为 3 cd/m2,目标亮度为0 cd/m2,导光板字符亮度输出值向目标亮度曲线趋近;t=0.3 s时,导光板字符亮度输出值到达目标亮度曲线,但随后由于惯性作用,穿过目标值,产生超调;直到t=0.6 s时,到达并稳定跟随目标值;t=1.74 s时,光环境照度超过阈值,导光板切换到低功耗状态,亮度目标值跳变为0 cd/m2;t=2.18 s时,亮度输出值再次稳定在目标值。
考虑到参数c取值为15时跟踪误差出现超调,将参数c调整为10,再次进行仿真得到系统响应,如图7所示。
图7 c取值为10时系统输出值跟踪误差
保持相同的初始条件,从初始时刻开始,导光板字符亮度输出值开始向目标亮度曲线趋近;t=0.36 s时,导光板字符亮度输出值到达目标亮度曲线并稳定跟随目标值;t=1.74 s时,光环境照度A超过阈值,系统判断导光板应切换到低功耗状态,亮度目标值跳变为0 cd/m2;t=2.21 s时,亮度输出值再次到达并稳定跟随目标值。
相应地,导光板的对比度变化如图8所示。
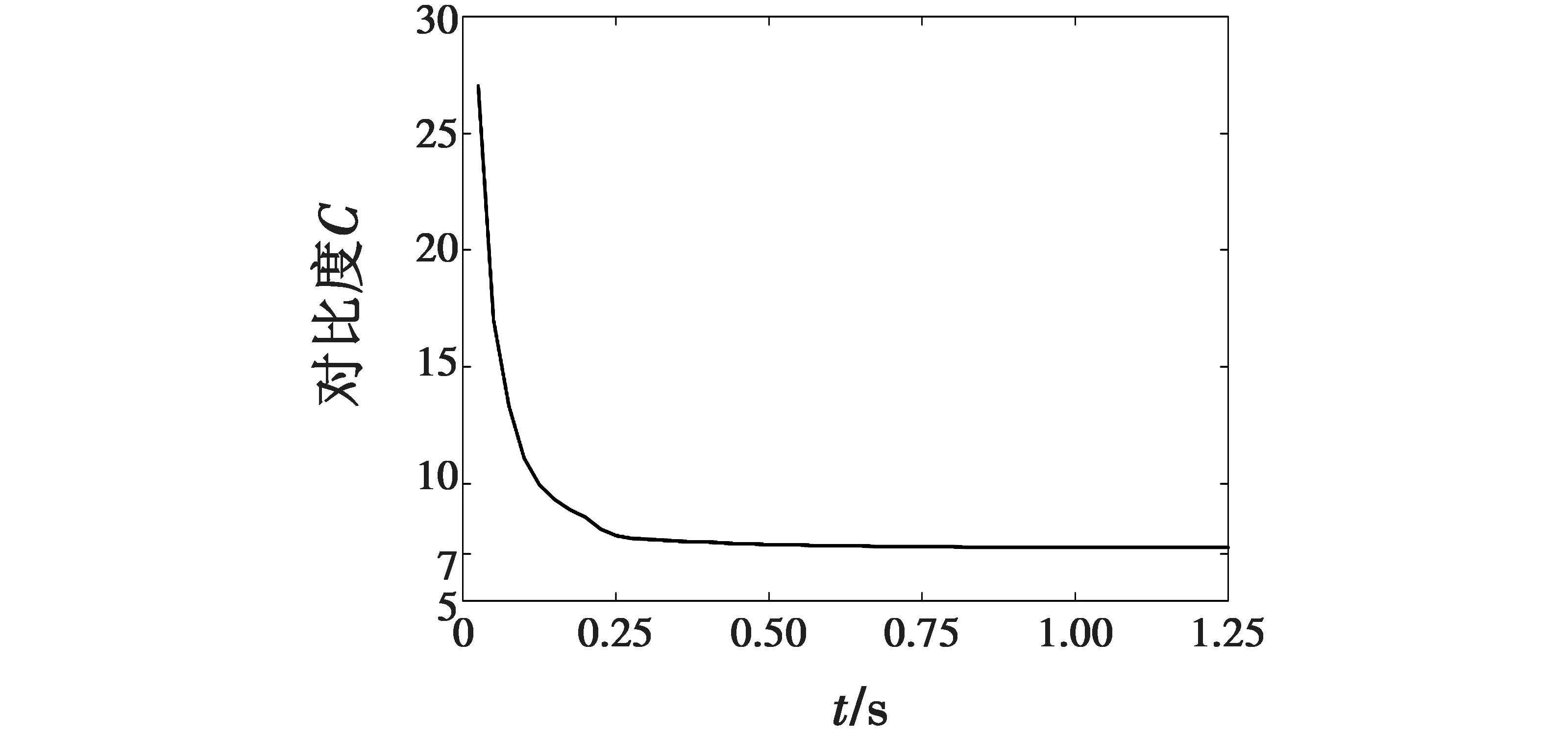
图8 导光板字符对比度变化
通过上述仿真分析可知,当参数c取值为10时,控制系统具有较好的跟踪特性,且能在光环境照度A达到阈值时完成导光板状态的切换。
4 结论
提出一种飞机导光板自动调光系统的滑模控制方法,并进行控制器设计,结论如下:
1)依据Lyapunov函数和误差函数的收敛性,推导控制器的滑模控制率表达式,验证结果表明,控制效果可实现预期目标;
2)仿真结果表明,滑模控制器参数c的取值影响阶跃响应的响应速度和跟踪精度,当参数c和η取值分别为10和5000时响应时间约为0.16 s,随着光环境照度改变,系统输出值具有较好的响应速度和跟踪精度,并能在光环境照度达到阈值时关闭导光板,达到预期控制目标;
3)验证了导光板字符对比度变化的稳定性,依据控制系统设计方案,当导光板字符亮度输出值准确跟踪亮度目标值时,导光板字符对比度可稳定在7左右,符合GJB 455-1988给出的对比度规定值。
