基于邻近点特征的地磁室内定位方法及性能分析
2022-06-23郝廉效余科根林贻若
郝廉效,余科根,林贻若
(中国矿业大学环境与测绘学院,徐州 221116)
0 引言
随着智能手机的普及和技术的发展,定位信息已经成为智能手机必不可少的基本信息。在室外,全球定位系统(Global Positioning System,GPS)、GLONASS、BeiDou等定位系统有着很高的定位精度,可以满足人们的定位需求。由于卫星信号在室内环境中容易被障碍物遮挡,全球导航卫星系统(Global Navigation Satellite System,GNSS)定位技术无法满足室内定位需求。近年来,大家研究了许多室内定位方法。常见的室内定位技术包括Wi-Fi、蓝牙、射频识别(Radio Frequency Identification,RFID)、超宽带(Ultra-Wide Band,UWB)和地磁等。定位精度、适用范围、成本以及能耗都是制约室内定位发展的问题,例如:UWB的定位精度较高,但成本很高;RFID的定位精度高,但定位范围较小;Wi-Fi与蓝牙的定位成本较低,但需要基础设施硬件支持,且定位精度较差等。
由于地球磁场和建筑物结构的影响,不同的室内位置有着不同的磁场强度,这也是地磁室内定位的基础。此定位方法的优点是成本低、范围较广、定位复杂度低且定位精度较高。指纹定位方法为地磁室内定位常用的定位方式,不同的指纹位置常常有不同的定位结果。然而,地磁定位的精度不够稳定,在100m范围内,平均误差为1~5m,而且地磁定位受定位区域磁场影响较大,难以通过算法较大地提高定位精度。S.Shahidi等提出了一种低复杂度、无基础设施的地磁定位方法,其定位精度可达2.5m。S.Yeh等使用加权磁场分量和K近邻(K-Nearest Neighbor,KNN)算法结合的地磁定位方法,有效提高了地磁室内定位精度,一定环境下可实现0.76m的定位精度和91.7%的定位准确率。
由于地磁场广泛存在于室内环境中,地磁定位也常常与其他定位方式融合,从而提高定位效果。近年来,常常把地磁、Wi-Fi以及行人航位推算(Pedestrian Dead Reckoning,PDR)结合在一起,从而提高定位精度。Li Y.等提出了一种融合Wi-Fi、地磁和PDR的定位方法,通过实验证明了该方法具有更好的定位效果。Guo X.等设计了一种基于磁/Wi-Fi/PDR的多模融合定位系统,该系统可达到1.6m的平均定位精度,优于其他单一定位方式,且覆盖范围广,鲁棒性强。因此,需要考虑室内区域做融合算法的必要性以及融合算法的选择。
是否采用地磁定位,是否与其他定位手段融合,是否可以采用插值来快速构建指纹库,都需要对定位区域有一个预判。此预判必须满足快速、准确的条件。因此,最好可以构建一个室内区域判别系统,对地磁定位精度好的区域只使用地磁,反之选取融合。使用这种判别可以极大地减少不必要的工作量,提高定位的效率。
本文提出了一种邻近点特征的概念,仅需采集少量的指纹即可求得,可以提前预判定位区域的精度状况。结合邻近点特征和快速构建指纹库的方法,可以判别地磁定位在对应区域可能的精度效果、需不需要进行融合定位等。
1 邻近点特征提取方法
在地磁定位的研究中,常常使用磁场强度图谱表现室内区域的磁场变化规律。然而,此图谱仅反映了磁场的变化,并不能展现定位区域的定位误差及精度。因此,本文提出了一种与定位精度有正相关关系的磁场特征——邻近点特征。
1.1 邻近点特征
理想条件下,选取欧式距离最小的候选点为准确定位点。但在实际定位中,欧式距离最小的候选点常常不是其准确点,需要选择欧式距离最小的个候选点,那么候选点与准确点的空间距离对于定位精度则有着较大的关系。如果候选点集中较多的为准确点的相邻点,那么无论是加权平均还是聚类都可以取得较好的定位结果。因此,可建立一个求取候选点集中相邻点的个数对于定位结果影响的特征提取模型。
据此,提出了一种基于磁场的特征——邻近点特征,做相应判断。首先,将每一个指纹点作为测试点,使用式(1)计算测试点与其他(-1)个指纹点的欧式距离。
=

(1)

(2)
其中,(,)是测试点的实际坐标;(,)是第个候选点的实际坐标。这里设定一个阈值,以衡量候选点与测试点实际位置的远近。若≤,则=1,代表第个候选点距离测试点近且利于得到较为准确的定位结果;反之则距离远,不利于定位,=0。在实际定位中,若较多的候选点位于阈值之内,则定位误差很小。计算所有候选点的和与的比值作为邻近点特征(Proxi-mity Points Feature,PPF),特征范围是0~1。
(3)
(4)
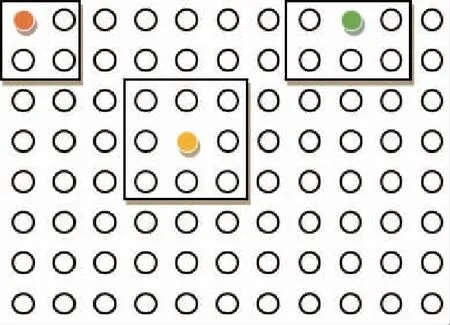
图1 三类指纹点
1.2 快速构建指纹库
指纹库的构建和更新是地磁室内定位的重中之重。若想知道一个室内区域的粗略的定位精度状况,则需要采集大量的指纹点以及测试点数据。单点采集指纹点和测试点将花费大量的时间和人力。
单点采集耗费时间的原因是每一个指纹点都需要停留一段时间来采集磁场信息。为了克服这一缺陷,可以采用动态采集多个指纹点磁场的方法。具体方法是手持采集设备,尽量匀速地行走一定的距离,然后把采集的磁场信息均匀地分配到该直线上的各个指纹点。动态采集的方法一定程度上可以代替单点采集构建指纹库的方法。所以,这里介绍一种快速构建指纹库的方法。
首先,把室内区域分为多条直线的行走路径,并统计每条路径上的指纹点数量。然后,采集人员手持采集设备在直线路径上匀速行走,并记录开始点和终结点。以同样的方法采集所有直线路径的磁场信息。最后,再把每条路径上采集的磁场信息平均分配到该路径的各个指纹点上,这样就可以快速地构建一个区域的指纹库。此种采集磁场的方法可以用于分析特征,但如果要用于定位指纹库的构建,其精度还有待提高。
这种快速构建指纹库的方法采用匀速采集并平均分配的方法。然而,保持匀速是比较困难的,尤其是范围较大的区域。因此,可以参考PDR中使用的计步算法原理以实现磁场信息的分配。此种基于有限状态机计步的算法可以提取行走时每一步落地点的加速度信息。把落地点与指纹点建立对应关系,然后把落地时刻对应的磁场信息作为指纹点信息。此种方法可以一定程度上解决匀速行走的问题。
2 邻近点特征实验分析
本节采用4个不同类型的定位区域的地磁定位数据,以分析邻近点特征与定位精度的关系。常见的室内定位场景为开阔区域和狭长的走廊。4个实验场地均位于中国矿业大学南湖校区,实验场地1位于体育馆2楼走廊,长40.8m,宽2.4m;实验场地2位于5号博学楼C区4楼走廊,长39.2m,宽3.2m;实验场地3位于4号博学楼AB区4楼,长14.4m,宽6.4m;实验场地4位于1号博学楼C区4楼,长12.8m,宽7.2m。4个实验场地的指纹点数分别是170、147、144、144个。为了实验方便,在指纹点位置上采集磁场信息作为测试点数据。采样设备为小米8,采样频率为50Hz。
2.1 实验区域的定位误差与特征均值
在采集指纹库数据后,使用1.1节提到的方法计算各个指纹点的邻近点特征,邻近点特征的范围是0~1。然后,通过KNN算法求得各个指纹点位测试点的定位误差。表1所示为4个实验区域的平均定位误差和平均邻近点特征。
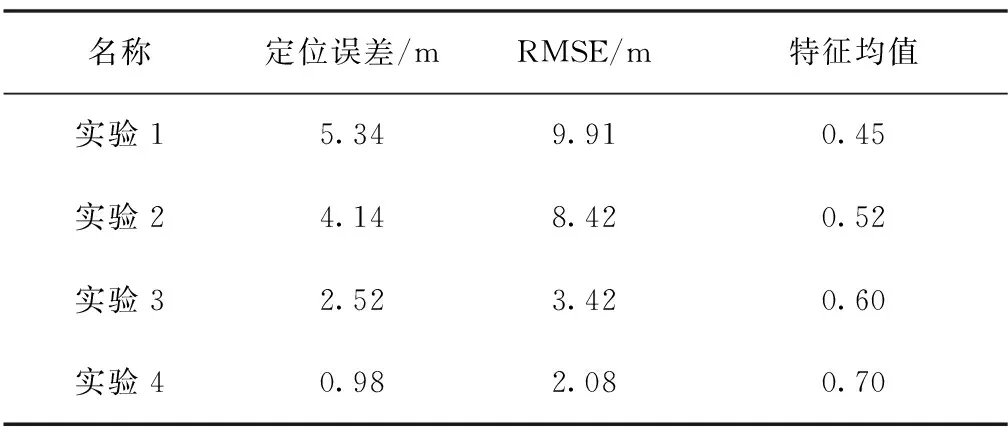
表1 定位误差及特征均值
由表1可知,实验1的定位场景是长走廊,平均误差为5.34m,均方根误差为9.91m,平均特征为0.45;实验2的定位场景是长走廊,平均误差为4.14m,均方根误差为8.42m,平均特征为0.52;实验3的定位场景是开阔区域,平均误差为2.52m,均方根误差为3.42m,平均特征为0.60;实验4的定位场景是开阔区域,平均误差为0.98m,均方根误差为2.08m,平均特征为0.70。实验场地3、4为开阔区域,其平均特征较大,误差较小。走廊区域进行的实验1、2则反之。这是因为走廊区域存在较多的模糊匹配。在大多数磁场定位中,开阔区域的定位精度也要优于走廊区域。实验场地1的平均邻近点特征最小,但平均定位误差最大。实验场地4则平均邻近点特征最小,平均定位误差也最小。
2.2 不同特征范围的定位误差
为了更好地分析不同特征值范围内测试点的定位情况,以邻近点特征阈值为0.5,将所有的测试点分为两类。一类的特征值大于阈值,记为满足特征;另一类的特征值小于阈值,记为不满足特征。假定误差小于2m为定位准确,分别计算两类指纹点的定位准确率。图2所示为4个实验两类测试点所占有的比重。2个走廊区域的实验满足特征的测试点比重较小,开阔区域的测试点比重较大。
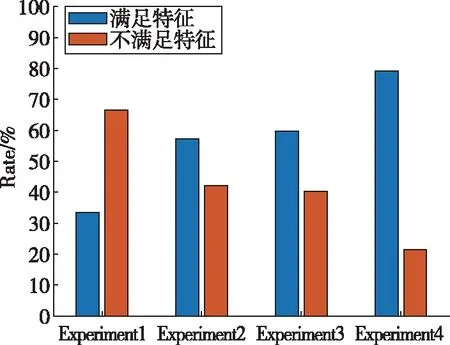
图2 两类测试点比重
图3和图4所示为两类测试点的平均定位误差和定位准确率,蓝色柱状为满足特征的测试点,红色柱状为不满足特征的测试点。
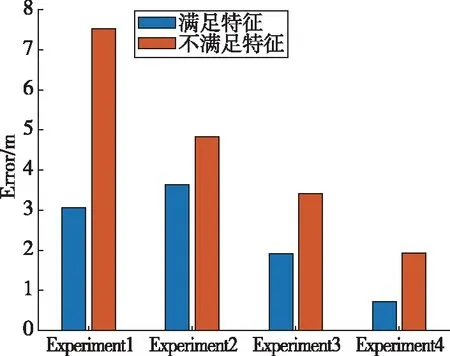
图3 定位误差对比
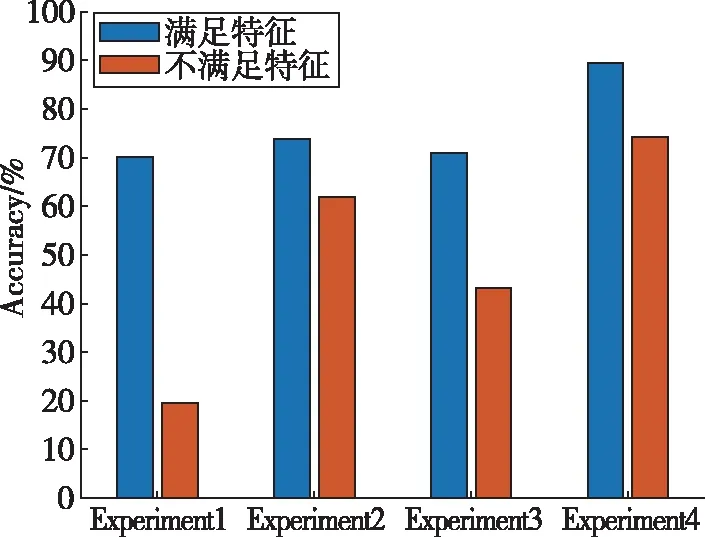
图4 定位准确率对比
在不剔除粗差的前提下,4个实验中满足特征的测试点有着更低的误差均值和更高的定位准确率。实验1和4中满足特征的测试点定位误差明显小于不满足特征的测试点,定位准确率明显高于不满足特征的测试点。然而,实验2和3的这种关系却不明显。这是因为除了邻近点特征外,磁场辨识度等因素也会影响定位表现,即实验2和3中不满足特征的测试点可能有着更高的磁场辨识度。
为分析不同特征范围内测试点的定位准确率,分别统计0~0.2、0.2~0.4、0.4~0.6、0.6~0.8和0.8~1特征范围内测试点的定位准确率,如表2所示。在统计中,有的范围内测试点数量较少,如实验2中0.8~1部分和实验4中0~0.2部分,分别有6个和5个测试点。此种情况点位样本太小,不具有统计价值。
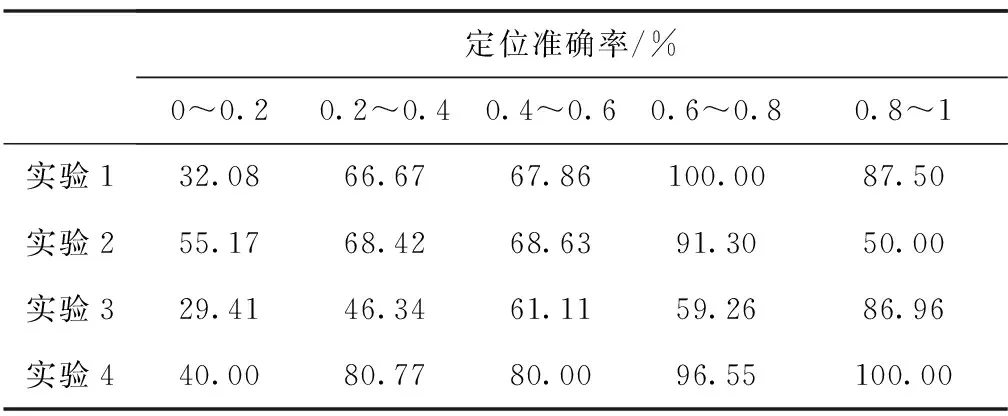
表2 不同特征范围定位准确率
由表2可知,4个实验中特征范围越大的测试点定位准确率越高,实验1的0.6~0.8和实验4的0.8~1范围甚至可以达到100%的定位准确率。此外,当特征值处于0~0.2时,定位准确率极低,有着很高的错误匹配率;0.6~1的特征范围有着最优的定位准确率。
2.3 不同算法的定位误差与特征均值
室内磁场信息维度较小,机器学习、滤波算法等对室内定位精度提高较小且算法复杂度较高,所以最近邻(Nearest Neighbor,NN)、KNN、加权K最近邻(Weighted K Nearest Neighbor,WKNN)、增强加权K最近邻(Enhanced Weighted K Nearest Neigh-bor,EWKNN)、动态时间归整(Dynamic Time Warping,DTW)等简单算法为常见的定位方法。在不同的定位区域有着不同的适合的定位算法。在之前的研究中,走廊区域适宜NN算法和DTW算法,两种算法在特殊情况下均有着较高的定位精度,但是定位准确率不高。开阔区域适宜WKNN算法和EWKNN算法,均可达到较高的定位精度和准确率。表3所示为4个实验区域NN、WKNN、EWKNN三种不同定位算法的定位误差表现。
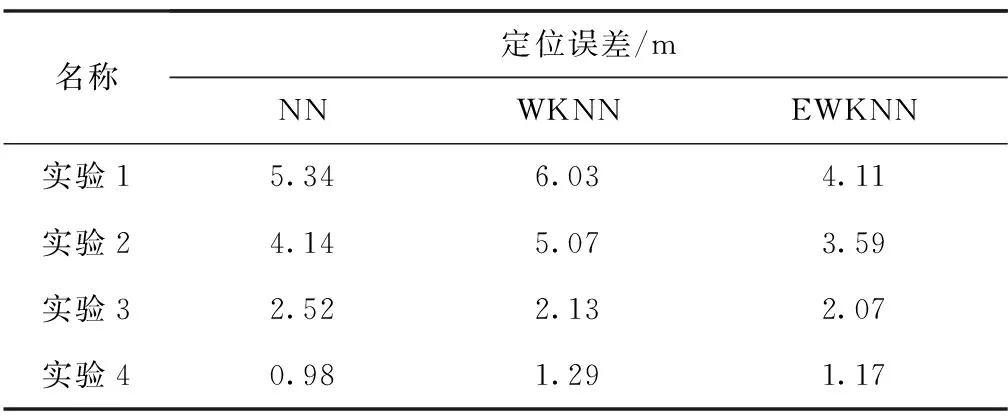
表3 不同算法定位误差
表3中,实验1、2、3在EWKNN算法下取得最高的定位精度。EWKNN算法是一种动态选择值的KNN算法。因为在实际定位中对不同测试点选择不同值才能达到最优定位表现,所以一些定位区域适宜EWKNN算法。实验4在NN算法下取得最优定位精度,这是因为实验4更贴近理想定位条件。一般来说,WKNN算法的定位精度要优于NN算法,然而4个实验中只有实验2是这种情况。这是因为磁场辨识度对地磁定位影响较大,磁场辨识度较高的测试点更容易在NN算法下取得最小误差,但如果使用WKNN算法,定位误差必定会上升。
图5所示为4个实验不同算法下的定位误差与邻近点特征均值分布图。在不同算法下,实验区域的定位误差仍然与其邻近点特征成一个负相关的关系。
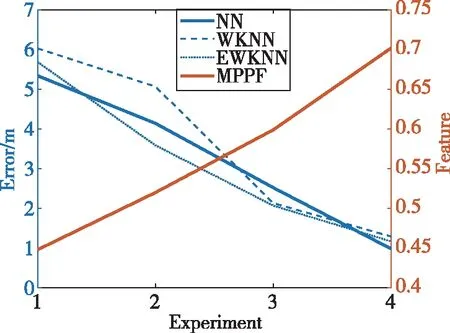
图5 不同算法定位误差与特征均值
2.4 小结
从以上的数据分析和结果,可以得出以下结论:
1)邻近点特征均值越大,定位区域的定位误差越小;
2)开阔区域的邻近点特征均值要大于走廊区域,定位误差小于走廊区域;
3)以0.5为特征阈值,大于特征阈值的测试点有着更高的定位准确率和更小的定位误差;
4)邻近特征越大的测试点定位准确率越高。
在实际定位中,不同区域的地磁定位精度有着巨大的差异,给定位工作带来了困难。例如:经过大量的数据采集后发现,此区域地磁定位精度很差;对于地磁定位精度较高的区域进行多种定位手段的融合,造成资源浪费,等等。使用本文提出的邻近点特征求取和快速构建地磁指纹库的方法,可以在一定程度上缓解这些问题,并指导定位区域定位手段的选取。
3 基于特征的指纹库重构
在第2节中,通过实验证明了邻近点特征与点位误差呈一个负相关关系。邻近点特征可以对地磁定位精度进行预判,并通过这种预判来方便、优化定位工作。从特征求取来看,邻近点特征可以反映指纹点与其相邻指纹点的磁场信息相似度。邻近点特征较大,则该点与其相邻指纹点的磁场相似度更高。实验3和4均是邻近点特征较高并且有着较高磁场相似度的定位区域,适宜采用一些插值算法以减少指纹库的采集工作量。
本节的实验区域位于中国矿业大学南湖校区的1号教学楼C区2楼,记为实验5。定位区域的范围是7.2m×12m,以0.8m的采样间隔采集了135个指纹点,每个指纹点采集时间是5min;并均匀采集了130个测试点,每个测试点的采样时间是3s,本次实验的采集设备是小米8,采样频率是50Hz。
实验5的邻近点特征分布如图6所示,计算得到的平均邻近点特征是0.74,略高于实验4的0.70。表4所示为实验4和5的定位误差对比。实验5的定位误差为0.73m,均方根误差为1.40m,均低于实验4。此实验也满足邻近点特征与定位误差的负相关关系。
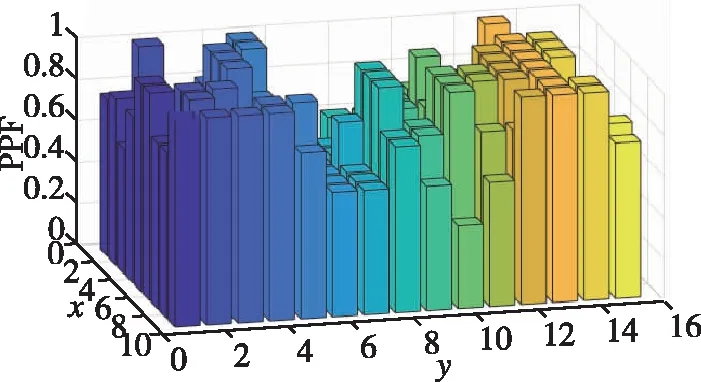
图6 实验邻近点特征分布
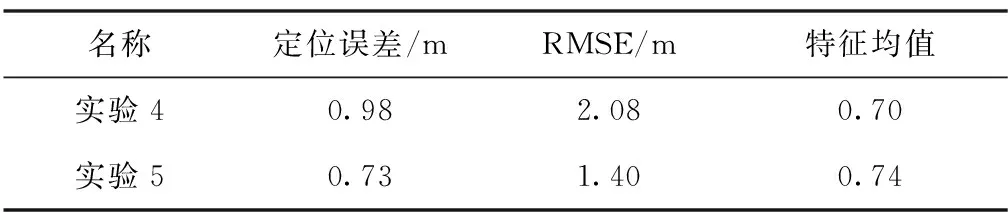
表4 实验4和5对比
实验5的邻近点特征较高,所以是磁场相似度较高的定位区域。首先,使用增大采样间隔来减少指纹库的采集工作量。将采样间隔增大到1.6m,仅需要采集40个指纹点,是原有采集量的29.6%。然后,使用插值算法将其他的指纹点重构出来。这里使用的是Matlab自带的最邻近插值(nearest)、线性插值(linear)、三次立方插值(cubic)和三次样条插值(spline)。图7所示为四种插值算法重构指纹库后的定位误差表现。
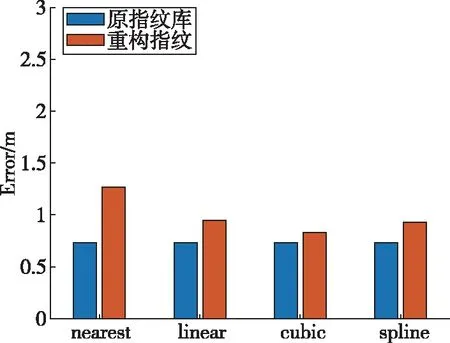
图7 指纹重构后的定位误差
从图7的误差柱状图可以看出,采用四种插值算法重构指纹库后的定位误差略有上升,其中最邻近插值误差上升最多,三次立方插值误差最接近原有指纹库的定位精度。除最邻近插值外,其他插值算法均维持在1m以下的定位精度。因此,对于邻近点特征较高的定位区域,其指纹点磁场相似度较高。采用插值算法减少大量的指纹采集工作量后,定位精度有所下降,但仍然可以满足定位需求。
4 结论
为解决地磁室内定位中的一些弊端,本文提出了一种基于邻近点特征的地磁定位辅助方法。邻近点特征可由线下数据求得。经实验验证,该特征可以较为准确地预判定位区域的定位误差。邻近点特征的范围是0~1,特征越大的则测试点定位误差越小,定位准确率越高。经过对多个实验区域定位性能的分析,邻近点特征均值越大的定位区域定位误差较小,本文实验4和5的邻近点特征均值大于0.7,其定位误差均小于1m。依据此特征的性质,可快速识别定位区域选择磁场定位的适宜性。邻近点特征的求取实现了对定位区域的地磁定位精度的预判,为定位区域定位方法的选择提供了指导,减少了不必要的工作投入,极大地方便了定位工作。
邻近点特征的另一特性是可以代表指纹点与相邻指纹的磁场相似度。特征越大则意味着指纹点与其相邻指纹有着更高的相似度。针对特征均值较大的区域,本文通过实验证明了仅采集29.6%的指纹并不会对定位精度造成较大的影响。通过这种方法,可以有选择地减少指纹库的采集工作量,提高室内定位的效率。
