电子巡航分级预警监管模式 在黄浦江水域的应用探索
2022-06-22郑丕显张光辉张焱
郑丕显 张光辉 张焱



摘要:本文将研究水域进行了网格划分,基于船舶领域理论、风险因素分析及船舶监管实际,设计了不同级别的电子巡航预警信号,并提出针对性管控措施,形成了一套可复制、可推广的黄浦江水域电子巡航分级预警监管模式,从而不断提高电子巡航系统的智能感知能力。
关键词:黄浦江;电子巡航;分级预警;监管模式
中图分类号:U692 文献标识码:A
0 引 言
随着海事信息技术的不断发展,电子巡航已成为黄浦江海事管理机構较为常见且有效的监管手段,为进一步挖掘黄浦江电子巡航智能监管潜力,本文从分类管理、风险分析、多级预警、闭环管控等多方面着手,探索电子巡航分级预警监管模式在黄浦江水域的应用,以期提高电子巡航智能感知风险能力,更好地辅助电子巡航员开展日常海事监管工作。
1 电子巡航背景
电子巡航是利用船舶交通管理系统(VTS)、船舶自动识别系统 (AIS)、全球定位系统(GPS)、闭路电视监控系统(CCTV)、甚高频无线电话(VHF)等信息化系统对辖区航道、码头、锚地、港池、渡口及辖区内船舶航行、锚泊和作业等情况的巡查,以实施水上安全监管、防止船舶污染及人命救助的现代化海事监管模式[1]。
电子巡航是海事管理机构对水上交通安全进行远程监管的重要方式之一[2],主要应用于辖区水域和船舶监控、交通组织和维护、预警信息发布、应急处置和船舶纠违等海事日常监管工作。
相比于传统的巡逻艇水域巡航,电子巡航具备巡航限制条件少、应急速度快、成本较小等优点。当巡逻艇、无人机等海事设备在恶劣天气无法出动时,只要保证电子巡航系统相关设备保持正常运行,电子巡航就成为海事管理机构开展通航管理和应急救助等工作较为可靠的手段,同时在一定程度上减少了不必要的轮艇燃油消耗和人力成本。
2 黄浦江水域电子巡航智能监管中存在的问题
2.1 电子巡航智能感知风险能力不足
黄浦江水域狭长、弯头多、支流港多、船舶流量大,加之作业码头、轮渡线、桥梁等各类通航风险因素交织,指挥中心电子巡航员需要24 h不间断关注辖区水域和船舶,观察和评估辖区船舶通航状况,并采取针对性措施。电子巡航仍处于“人盯死守”的阶段,智能风险识别、自动预警显示和船舶数据集成分析等功能未能有效开发使用,智能感知风险能力仍有待进一步提高。
2.2 当前电子巡航工作消耗较大人力
电子巡航员不仅要通过全面巡航、重点巡航持续排查辖区风险隐患,而且要兼顾恶劣天气预警预控、应急响应、伤病救助等其他事项,日常电子巡航工作强度较大,仍需要消耗较多的执法精力,而当前电子巡航系统在辅助执法人员监管、决策等方面未能充分发挥其智能化监管的优势。
3 黄浦江水域电子巡航分级预警监管模式探索
本文以闵行海事局西渡海巡执法大队辖区(从摇车港至闵行电厂)作为研究对象,探索适合辖区实际的黄浦江水域电子巡航分级预警监管模式。
3.1 网格化管理
根据研究水域的码头、桥梁、支流港的分布情况以及航道通航特点,同时结合监管实际,将辖区划分为4个网格,每个网格对应上行航道、下行航道2个分区,从而实现对网格内的船舶动态监管的统一标准,如图1所示。
网格一:XD-1网格位于摇车港至开源码头下角与俊光码头下角连线间水域,航道总长约2 175 m。网格内无作业码头。
网格二:XD-2网格位于开源码头下角与俊光码头下角连线至淡水河口上口至对开水域连线间水域,航道总长约700 m。网格内作业码头5家,支流港1个。
网格三:XD-3网格位于奉浦大桥下游500 m至闵浦二桥上游500 m之间水域,航道总长约2 500 m。网格内作业码头7家,跨江桥梁3座(5座桥墩)。
网格四:XD-4网格位于闵浦二桥上游500 m至闵行发电厂上游边界与巨潮港上口连线之间的水域,航道总长约4 800 m。网格内作业码头5家,支流港2个,跨江桥梁1座(1座桥墩)。
3.2 多级预警管控设计
3.2.1 船舶领域理论
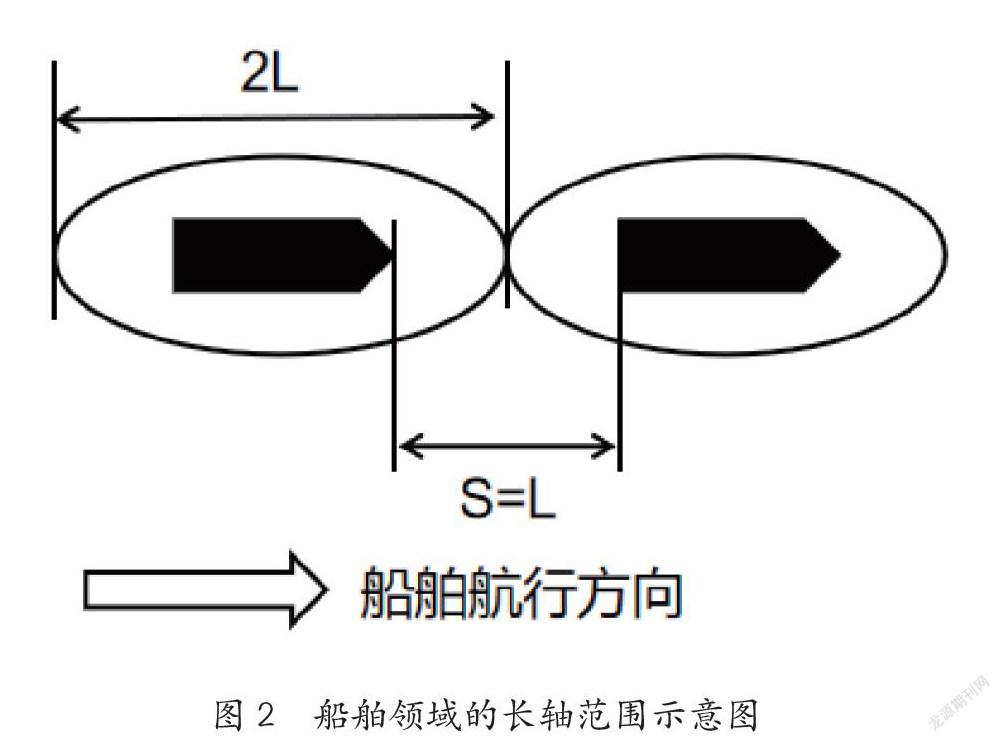
船舶领域理论是1963年日本的藤井弥平教授提出的,指船舶为保证航行安全所需的安全水域,其他船舶进入该水域时会产生紧迫局面。该领域模型是以船舶为中心,长半轴沿船舶首尾线方向、短半轴沿正横方向的椭圆[3]。通常情况下,在内河航道通过能力计算中,建议船舶领域的长轴长度取1.5~4.0 L,短轴长度取 0.4~1.0 L[4],L为标准船长。
黄浦江上游水域小型船舶较多,与内河水域相似,同时考虑到实际航行中船舶受流速、风速以及其他因素的影响,因此基于船舶领域理论,将黄浦江水域航行的船舶领域长轴长度取为2~3 L,即在长轴方向的安全间距S=1~2 L,如图2所示。结合船舶流量监控数据及日常监管实际,设置电子巡航系统预警信号规则如下:
(1)船舶间距S≧2 L,系统显示蓝色(常态)预警信号。
(2)船舶间距2L>S≧1 L,系统显示黄色(警示)预警信号。
(3)船舶间距1L>S,系统显示红色(拥堵)预警信号。
3.2.2 风险因素分析及预警参数设计
对网格内风险因素分析并结合船舶流量监管实际,选取合适的标准船长L。
XD-1网格内主要风险是航道在白庙港下游稍微凸向浦北侧,下行船舶较易出现反航道航行,闵南船厂少量非法待泊船靠离影响航道正常航行船舶,根据船舶航行实际情况及流监控数据,建议采用单船长度为50 m的标准船长。
XD-2网格内主要风险是船舶靠离码头、横越航道的情况较多,进出淡水河口的渣土运输船与其他船舶的交叉会遇频次高,以及紧邻奉浦大桥桥区水域,船舶进入桥区前调整的缓冲距离有限,建议增大标准船长至70 m。
XD-3网格内主要风险是船舶碰撞桥梁、客渡船越江安全和作业码头船舶靠离泊、横越航道等行为。基于此网格内作业码头多、大桥多、客渡船横越航道频繁和水上施工的影响,建议采用增大标准船长至80 m,并按照上行航道两列并排航行、下行航道单排航行的实际管控要求分别设置预警参数。
XD-4网格内航道基本呈直线延伸,基于此网格内码头分布分散、航道较宽的实际情况以及船舶流监控数据,建议采用单船长度为50 m的标准船长。
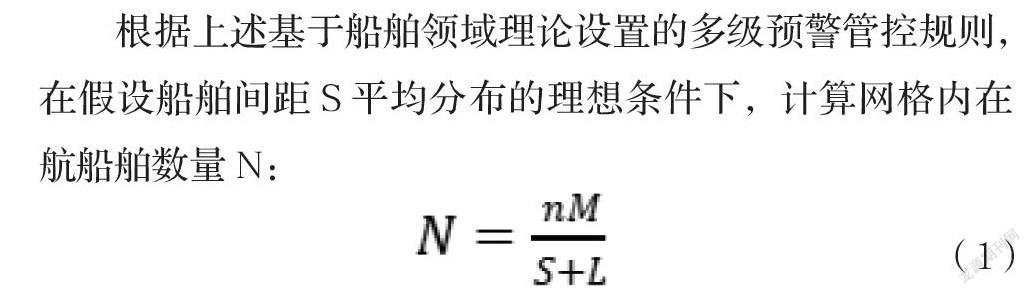
根据上述基于船舶领域理论设置的多级预警管控规则,在假设船舶间距S平均分布的理想条件下,计算网格内在航船舶数量N:
(1)
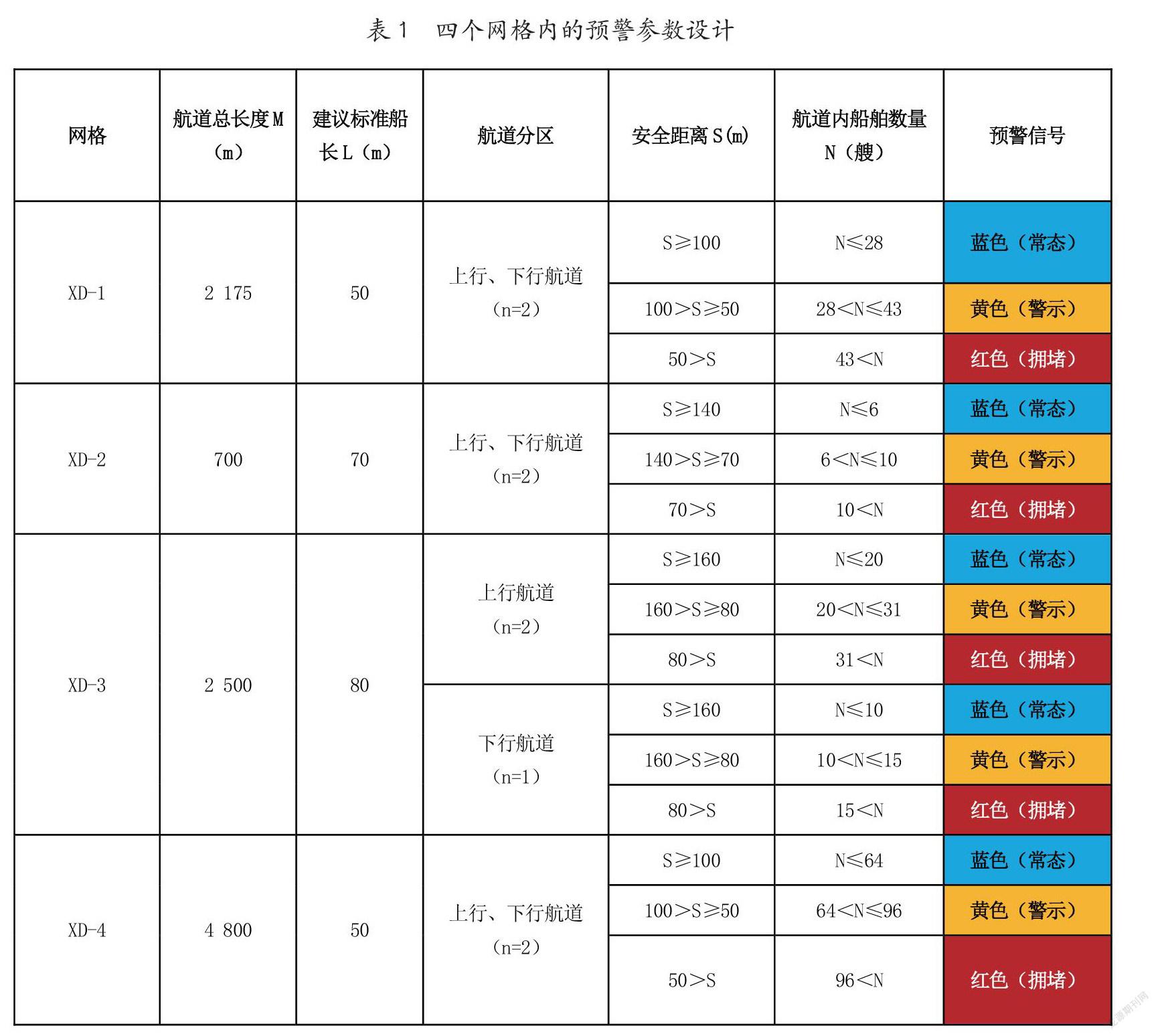
式(1)中:M为航道总长度,n为船舶并排航行最大列数,相关预警参数设计见表1。通过网格内在航船舶数量的多少即可快速、简洁、直观地反映出航道内的拥堵程度和安全状况,为海事执法人员提供相应预警提示,辅助执法人员开展管控决策。
3.3 针对性管控措施
将以上预警规则接入电子巡航系统,通过电子巡航系统智能识别不同网格内的船舶AIS数量,当航道内船舶数量达到设定的阈值,且为了防止偶发的船舶AIS信号跳跃导致系统误判,持续时间在1~3 min以上时,即分别显示蓝色(常态)、黄色(警示)、红色(拥堵)等不同等级预警,通过视觉信号的形式显示网格内的风险属性,实时提醒海事管理机构值班人员对相应水域进行关注和监管,分级预警监管模式如图3所示。
值班人员根据预警风险等级的高低(红色〉黄色〉蓝色),优先对风险等级高的网格区域采取相应的针对性监管措施(见表2),从而对风险状况及早预警和处置,实现海事安全监管的闭环管理。
4 结 语
电子巡航分级预警监管模式能够辅助海事管理机构电子巡航人员更加快速、直观地感知辖区船舶整体状况并采取应对措施,使电子巡航由“人工巡航”逐步向“系统智能巡航”转变,同时该模式具有可复制性,在黄浦江其他水域或者水域环境等影响因子发生变化时,调整相应的算法即可重新设定预警规则,实现电子巡航系统预警提醒的不断优化。
在上述电子巡航分级预警监管模式的基础上,未来可将黄浦江船舶流管控、船舶监管和码头作业等数据陆续接入电子巡航系统,通过大数据采集和分析,记录船舶航行习惯、码头动静态计划,建设通航数据库,对船舶的航行、码头作业形成预报和提示[5],实现对黄浦江船舶动态的精准掌控,对风险状况及早预警并采取应对措施,最终形成“多维感知、高效协同、智能处置”的现代化、智能化水上交通动态管控新格局。
参考文献
[1] 论海事电子巡航与现场巡航融合[A].李国寅,韦鹏献,胡栋科.2020年海事管理学术年会优秀论文集[C].2020.
[2] 梁泓.海事监管中的电子巡航应用问题与对策[J].世界海运,2021,(309):32-35.
[3] 林晓梁,刘栋.基于船舶领域理论在船舶通航安全中的研究——以圆圆沙警戒区为例[J].中国水运,2021,(10):5-6.
[4] 陈恺,张玮,李瀛.基于船舶交通流的内河航道通过能力研究[J].中国水运,2012,(12):38-40.
[5] 王筱竹.基于电子巡航的黄浦江海事动态监管模式研究与实践[J].中国海事,2016,(8):44-46.
作者簡介:
郑丕显,硕士研究生,闵行海事局指挥中心副主任,主要从事船舶通航管理相关工作,(E—mail)1147725145@qq.com,13761802803