一种基于远程通信技术的装修施工巡检机器人本体设计
2022-06-21姚志广任晓霞赵浩成
姚志广,任晓霞,赵浩成
(山西能源学院α.机电工程系;b.能源化学与材料系,山西 晋中 030619)
室内装修是每位住房业主入住前需要完成的一项重要工作,需要业主经常到施工现场进行监督与检查.装修工地一旦监管不力,就会出现装修材料不合格,材料进场时货不对板,入场后材料丢失等问题.施工环节不透明,施工人员操作规范性和施工质量得不到有效保障;装修设计师精力有限,难以顾及所有项目工地,无法有效控制设计效果;装修公司和开发商的项目分散,施工管理难,管理效率低,派出的监管人员汇报的情况不全面,且成本较高.为了解决以上问题,本研究在进行实地调研分析的基础上,结合目前流行的4G/5G 远程通信控制技术,设计出一款基于远程通信技术装修施工巡检机器人.其能够帮助业主、装修公司、开发商、设计师对房屋装修情况进行全方位实时检测,使施工环节透明化,极大地消除业主对于房屋装修情况的担心.
该机器人有灵活移动的机械本体,可以实现装修现场的无死角监控,利用远程通信控制技术,结合开发的软件系统,实现设计师、业主、装修公司和开发商在同一应用平台上对装修图纸进行同步修改,保证了设计师的设计效果有效落地.同时,该机器人配备无人值守功能,可在无人值守时进行巡检,并对可能出现的火情、盗窃等情况进行报警,可有效代替装修监管人员,大大降低装修成本.
1 总体设计
基于远程通信技术的装修施工巡检机器人总体设计思路是:通过该机器人,业主、装修公司、开发商和设计师可以实时对机器人进行指令的下达,实现机器人对施工现场的实时移动、跟踪、检测、对话等基本功能;装修公司和设计师与现场的装修人员,可以通过专门的软件系统利用装修施工巡检机器人实现对装修方案同步优化,并且该机器人可作为智能化装修工具对房屋进行辅助装修.为了实现上述主要功能,在对装修施工现场环境进行综合分析后,对基于远程通信技术的装修施工巡测机器人本体进行了设计,其主要包括巡检机器人机械结构、驱动机构、自主充电装置、视频移动平台、搭载机器人操作系统的可视化交互平台和远程操控终端等.总体设计示意图如图1 所示.
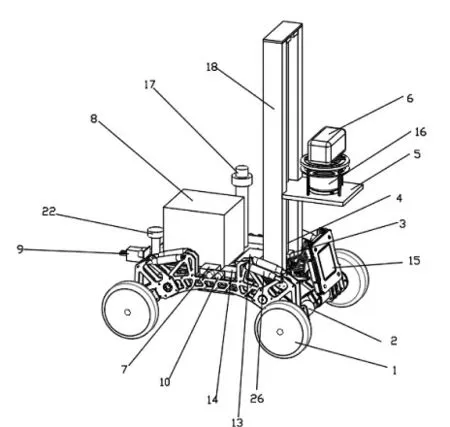
图1 机器人总体设计图
2 本体设计
基于远程通信技术的装修施工巡检机器人本体结构可分为机械结构、驱动机构、自主充电装置、视频移动平台、可视化交互平台及远程操控终端等.
2.1 机械结构
基于远程通信技术的装修施工巡检机器人本体机械结构,如图2 所示,包括底盘(12)和悬架(24)悬架和底盘通过连接轴(25)连接,连接轴有两根,其平行横向架设在底盘的前、后部.每根连接轴连有4 个悬架,对称分布于连接轴两端,每个悬架上设置一个减震器(26)减震器的一端与悬架相连,另一端和底盘相连,用于缓冲由不平路面传给底盘或车身的冲击力,并衰减由此引起的震动,以保证巡检机器人平顺行驶.

图2 机器人本体机械结构示意图
2.2 驱动机构
基于远程通信技术的装修施工巡检机器人的驱动机构包括:1.车轮;27.法兰联轴器;2.减速电机和驱动器等组件.车轮有4 个,前后左右对称分布在底盘下方,每个车轮通过法兰联轴器与减速电机连接,每个减速电机和机器人本体部分的悬架(24)相连.驱动器组件有4 个,分别通过信号线与减速电机相连,固定于底盘(12)下端,驱动器通过主控制器发出的主控制信号实现对减速电机转速、转矩的控制.
2.3 充电装置
基于远程通信技术的装修施工巡检机器人的自主充电装置(9)结构示意图如图3 所示,包括:(28)外壳;(21)步进电机;(20)滚珠丝杆;(29)丝杆螺母;(30)丝杆固定架;(19)插头. 外壳(28)为长方体半封闭式外壳,有2 个,其外形一样,两者通过卡槽反方向相连,可沿卡槽方向移动.其中一个外壳与机器人底盘(12)固定连接,水平位于底盘长中心线下侧;一端装有步进电机,另一端装有丝杆固定架,丝杆固定架与步进电机同轴布置.滚珠丝杆的一端固定在丝杆固定架上,另一端与步进电机轴通过梅花联轴器(31)连接.另一个外壳的一端装有插头,另一端连接有丝杆螺母.丝杆螺母(29)与滚珠丝杆(20)同轴连接.步进电机(21)转动带动丝杆螺母(29)、插头(19)和其中一个外壳沿卡槽前后移动,实现插头自主插入插座的功能.
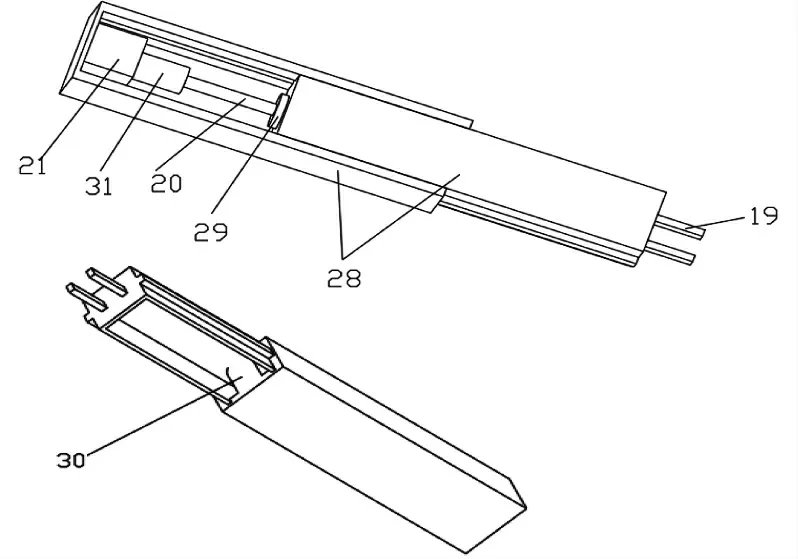
图3 充电机构结构示意图
2.4 视频移动平台
基于远程通信技术的装修施工巡检机器人的视频移动平台如图4 所示,包括支撑架(18)、支撑板(5)、摄像头(6)、步进电机(3)、滚珠丝杆(4)、丝杆螺母(32).支撑架为半开放式空心长方体,竖直固定于机器人底盘(12)长中心线一侧,步进电机有2 个,对称安装于支撑架下端.丝杆固定架(33)有2个,固定安装于支撑架(18)上端,且与步进电机上下对称.滚珠丝杆有2 根,其中一端分别与2 个步进电机轴通过梅花联轴器23 连接,另一端分别固定于2 个丝杆固定架上.丝杆螺母与滚珠丝杆同轴连接,支撑板固定在两个丝杆螺母上,与底盘平行.摄像头固定在支撑板上,实现摄像头上下移动和水平360°旋转,无死角地实时监测室内装修情况.

图4 视频移动平台示意图
基于远程通信技术的装修施工巡检机器人搭载机器人操作系统的可视化交互平台(15)包含视频采集系统、导航定位模块(22)、语音通话模块(14)、AI 视频图像处理模块(7).其中视频采集系统用于获取装修施工现场的视频画面,并通过通信系统传输至操控终端;语音通话模块固定于底盘的一侧,通过语音模块可实现施工人员与业主、装修公司、开发商、设计师等进行实时沟通.机器人的导航定位模块固定于底盘的另一端,导航定位模块以激光雷达为主,超声探距模块为有效补充,机器人利用激光雷达进行SLAM 实时地图构建与定位扫描,在避障的基础上实现最短路径导航.AI 视频图像处理模块固定于底盘上,且位于语音通话模块同侧,AI 视频图像处理模块通过图像识别算法,将从视频显示系统获取的视频图像进行AI 处理,与装修的工艺标准和历史检测数据对比分析,得出工程质量结果,AI 视频图像处理模块还可自主识别装修材料,人为在可视化交互平台(15)上点开出入库功能,入库和出库搬运时,让摄像头(6)进行扫描记录材料的采购和使用情况,实现了施工现场的实时监管和质量控制的全面智能化,减少了人工劳动,极大地提高了装修管控效率.
3 控制模块设计
基于远程通信技术的装修施工巡检机器人主控制器(13)以STM32F103ZET6 作为控制核心.主控制器(13)与远程控制终端通过4G/5G 模块相连接联合控制机器人进行工作,主控制器(13)用于获取远程操控终端发出的控制信息,并对其进行处理发送给巡检机器人,从而控制巡检机器人检测房屋装修情况.主控制器(13)还用于获取摄像头(6)、超声波模块(10)、导航定位模块(22)、烟雾报警器(17)反馈的信息,并对其进行处理发送给巡检机器人,控制巡检机器人按制定路线自主巡检,且能自主避障,其逻辑控制图如图5 所示.
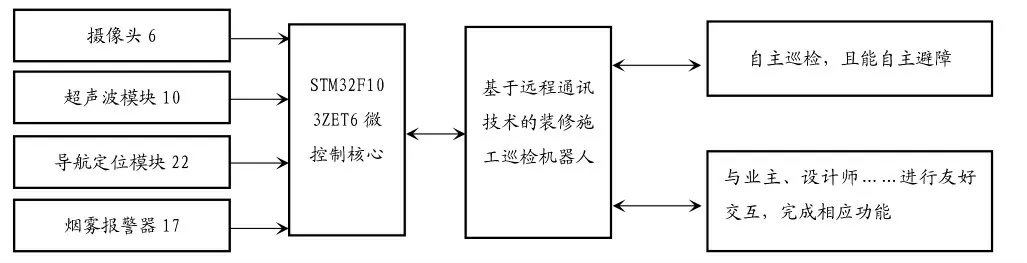
图5 机器人控制模块逻辑控制图
4 功能设计
为了能够更好地实现机器人与业主、装修公司、开发商和设计师进行友好交互,基于远程通信技术的装修施工巡检,机器人在完成本体结构设计与基本控制基础上,还设计了如下功能:
(1)通过远程控制终端控制巡检机器人,获取施工现场中的视频画面,AI 视频图像处理系统通过人工智能分析视频画面得出工程质量结果,通过扫描识别采购的装修材料,记录材料的出入库,监管人员通过语音通话系统对装修问题实时沟通,实现了施工现场的实时监管和质量控制的全面智能化,起到辅助装修的功能,减少了人工劳动,极大地提高了装修施工的监管效率.
(2)通过人脸识别技术自动识别家装施工现场的非授权人员,然后进行报警,并且自动拍照录像传输至远程操控终端,提醒家装现场施工人员以及监控人员.
(3)通过通信传输技术,业主、设计师、装修公司和开发商在远程操控终端上对图纸进行同步修改.
(4)通过电量检测模块检测电池电量状态,当电量低于10%时,机器人自主行进到充电口,充电装置的步进电机旋转,带动丝杆和插头向前运动,将插头插到插座上,实现自主充电.
(5)视频移动平台通过采用丝杆传动和水平旋转云台相结合的形式,使摄像头能够360°全方位无死角地对装修现场进行检测.
(6)巡检机器人底盘采用车架、悬架、减震器相连接的形式,可以缓冲由不平路面传给底盘或车身的冲击力,并衰减由此引起的震动,以保证巡检机器人平顺行驶.
(7)监控人员在使用的过程中可自由切换自主巡检和远程遥控两种模式,操作简单,省时省力,而且机器人造价低廉、结构简单、灵活性强,具有较高的稳定性、实用性、安全性.
5 应用场景分析
5.1 远程操控模式场景分析
当装修施工巡检机器人处于远程操控模式时,监控人员想要控制巡检机器人到达检测位置,可通过手机终端将控制信号发送至主控制器(13)上.主控制器(13)控制减速电机(2)的转动,减速电机(2)进行动力转化后带动法兰联轴器(27)转动,最后驱动车轮(1)转动,从而完成巡检机器人在装修施工环境里的移动功能.超声波传感器(10)可感应巡检机器人周围障碍物的存在情况,将信号传输至主控制器(13),主控制器(13)将处理后的信号发送到手机端.监控人员可以通过手机端远程控制摄像机移动平台,控制摄像头(6)上下移动,左右旋转,实现对房屋全方位的实时监管. AI 视频图像处理系统(7)将采集的视频图像进行分析,与装修的工艺标准和历史检测数据对比分析,得出工程质量结果.当出现装修问题时,监控人员可操控手机,通过语音通话系统(14),实时与施工人员进行沟通.当装修图纸出现问题时,监控人员可在PC 端远程对移动端(15)上的图纸进行修改,并与施工人员及时沟通.自动识别模块通过人脸识别技术自动识别非授权人员报警,并自动拍照录像上传至后台,可提醒施工人员以及监控人员.当烟雾传感器(17)检测到烟雾达到一定浓度时,对施工人员和监控人员进行报警.当电量低于总电量10%时,监控人员在手机端远程操控机器人行进到充电口位置进行充电,监控人员通过远程控制端控制巡检机器人实现视频图像采集、与施工人员同步实时通话、对装修图纸实时同步修改,并且通过AI 视频图像处理系统分析视频画面得出质量结果,实现施工现场的实时监管和质量控制.采用橡胶轮胎还可翻越小台阶和杂物.
5.2 自动巡检模式场景分析
当装修施工巡检机器人处于自主巡检模式时,通过定时器指定6 点、13 点、22 点这三个时间点巡检机器人开始自主巡检,按照输入的线路数据,自动实现巡检机器人对装修环境的巡检.超声波传感器(10)可感应巡检机器人周围障碍物的存在情况,将信号传输至主控制器(13).主控制器(13)对其信号进行处理,控制机器人自主躲避障碍物.摄像头(6)通过定时器,按照规定的时间循环上下移动,左右旋转,实现对房屋全方位的实时监管.AI 视频图像处理系统(7)将采集的视频图像进行分析,与装修的工艺标准和历史检测数据对比分析,得出工程质量结果.当出现装修问题时,监控人员可通过语音通话系统(14)实时与施工人员进行沟通.当装修图纸出现问题时,监控人员可在PC 端远程对移动端上的图纸进行修改,并与施工人员及时沟通.自动识别模块通过人脸识别技术自动识别非授权人员报警,并自动拍照录像上传至后台,可提醒施工人员以及监控人员.当烟雾传感器(17)检测到烟雾达到一定浓度时,对施工人员和监控人员进行报警.当电量达到10%时,巡检机器人会自主行进到充电口位置进行充电.
当装修施工巡检机器人的工作环境为夜间时,巡检机器人可执行自动巡检模式,运用导航定位模块(22),机器人按规定的路线行进,在接收到超声传感器(10)的障碍物信息后,可自主避障;通不过障碍物时,会进行报警并将机器人的状态信息发送到监控人员手机端应用平台APP 上. 视频显示系统的夜视功能可在夜间检测是否有人进入房屋,检测到有人进入时可对监控人员进行报警,有效地预防了夜间盗窃材料的问题.烟雾报警器(17)可实时检测房屋内的烟雾浓度,当浓度达到一定程度时对用户进行报警,有效地避免了火灾的发生.巡检机器人也可执行远程操控模式,监控人员可以通过手机远程操控巡检机器人,让其移动到检测地点,监控人员可根据回传的视频,检测房屋是否漏水、是否发生火灾、是否有人员闯入.
6 总结
综上所述,所设计的基于远程通信技术的装修施工巡检机器人本体,包括机械结构、驱动机构、自主充电装置、摄像头移动平台及搭载有机器人操作系统的可视化交互平台和远程操控终端等部分.既可以为装修施工过程中装修工地监管不力、设计师与现场施工人员沟通不畅、业主不能对装修情况进行实时监督的情况提供一条切实可行的解决途径,也可在无人值守时进行自动巡检,有效代替装修监管人员的工作,进而大大降低装修成本.