先进机器人磁力操纵系统非线性驱动优化设计
2022-06-21任志民林远翔刘杨
任志民,林远翔,刘杨
(1.运城职业技术大学汽车工程系,山西 运城 044000;2.荷兰屯特大学电气工程系,荷兰 恩斯赫德 7522NB;3.运城学院网络信息中心,山西 运城 044000)
在介入手术过程中,柔性手术器在心血管内部的导管定位是至关重要的[1],这是因为人体心血管系统内部导管手动导航的安全性在很大程度上取决于临床医生的技能,从业的医生必须经过较长时间和严格的培训才能达到实际临床操作水平。为了解决柔性手术器在心血管内部的导管定位及安全性问题,在相当多的导管设计中采用了磁驱动技术[2],在心血管内部的导管中集成了智能性先进机器人技术[3]。
先进机器人磁驱动系统中运用的磁驱动技术主要有两类:第1类使用多个电磁线圈围绕一个目标靶体组成一个阵列,尽管这些电磁线圈能够提供强磁场,但工作空间的可扩展性较差[4];第2类使用可移动永磁铁[5],系统可在更大的工作空间里操作运行,但需要设计复杂的执行机构和先进可靠的运动路径规划算法[6]。
在磁驱动系统设计中,如果将两类磁驱动技术的优点相结合,应该能够实现一种新型的先进机器人磁力操纵(advanced robot for magnetic ma⁃nipulation,ARMM)系统,如图1所示。系统中,产生磁场的可移动电磁线圈附着在有6个自由度的UR10机械臂上,在球形工作空间内为操纵系统提供非线性磁驱动;导管在电磁线圈的磁力驱动下带动柔性手术器按设定的路径运动,从而完成柔性手术器在心血管内部某个位置的定位。
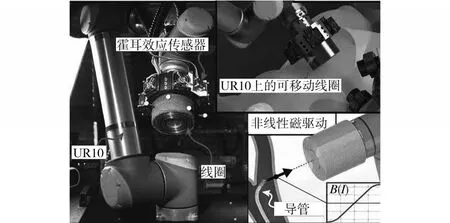
图1 先进机器人磁力操纵系统Fig.1 Advanced robot for magnetic manipulation system
1 模型与方案
由于ARMM系统中UR10机械臂的有效载荷有限制,电磁线圈产生的磁场呈非线性,其散热有约束条件,若要产生最大磁场,首先要优化设计电磁线圈,其次,在有效载荷、散热和其它约束条件下,必须在磁场测控环节处理线圈磁场的非线性问题,磁驱动系统才能按给定值产生驱动导管运动所需的磁感应强度和磁力。对于ARMM系统的磁驱动方案、电磁线圈的优化设计和磁场非线性处理方法还需通过实验和测量进行验证。
1.1 ARMM系统的磁驱动方案
如图2所示,安装在ARMM系统中UR10上的带有铁心的可移动线圈产生了磁场。将导管置于磁场中,其头部中心轴线ZC和线圈对称轴线用UR10校准;导管的偶极子受到磁力Fμ和转矩τμ的作用,引导并带动整个导管运动。图中,①为可移动线圈,②为血管内部导管,③为磁场。Γ为线圈的参考坐标,z为导管的偶极子沿轴线ZC到线圈端面的距离。

图2 ARMM系统的磁驱动方案Fig.2 Magnetic actuation strategy in the ARMM system
1.2 可移动电磁线圈的几何模型
由于机械臂UR10最大有效载荷mm为10 kg,因而限制了线圈的最大尺寸。可移动电磁线圈的磁感应强度与线圈电流、线圈与磁导管的距离关系如下式所示:

式中:B(z,I)为磁感应强度沿磁场ZC方向的标量值;I为线圈的电流;Im为I的最大值。
其几何参数绕组铜线的直径ω、铁心半径ri、绕组半径ro、铁心和绕组的长度l需用最大化问题解决方法并计算出来。建立的电磁线圈几何模型如图3所示。

图3 线圈几何模型Fig.3 Model of coil geometry
1.3 电流磁场非线性处理方案
因为电磁线圈在其工作范围内呈现出磁饱和状态,使得在任何变化率下的电流产生的磁场呈现出非线性。为了驱动导管运动,使磁驱动系统在某位置P处能按给定量产生磁感应强度及梯度,设计了一个如下式所示的迭代雅可比逆构造:
式中:qm,B分别为ARMM系统的输入和输出;b为qm与B经非线性磁场映射器处理后的负反馈输入;z,I为来自磁场的传感器测量值。
2 技术与方法
在ARMM系统中,在磁场测控环节对非线性磁场的处理运用了迭代映射方法,如图4所示。
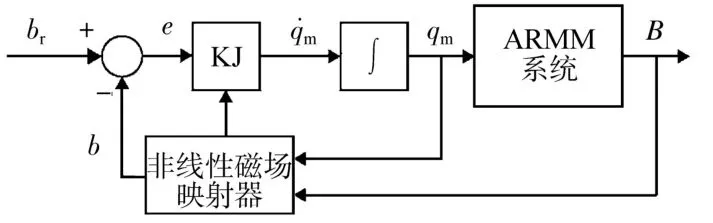
图4 ARMM系统中的迭代映射Fig.4 An iterative field map in the ARMM system
为了使动态参数qm,z及I产生的误差e最小化,采用了上述的雅可比可逆式。运用在线更新迭代映射方法,在对传感器的测量值z和I经过迭代、KJ环节虚拟阻尼、雅可比可逆矩阵代替正向矩阵[7]后,消除了磁场非线性磁滞的影响,提高了系统的稳定性。
2.1 电磁线圈模型的求解
为了求解最大磁感应强度,通过COMSOL5.2求解器建立了线圈的几何模型,连接Matlab 2017b程序并在线求解后,确定了能产生最大磁场的电磁线圈最优化参数值,得到了式(1)、式(2)给定的参数组(ω,ri,ro,l)条件下的磁场分布。经优化计算确定l为110 mm,以使得在每个ri与ro比值下线圈的质量尽可能相等。经优化的电磁线圈参数值为:ω=1.6 mm,ri=22.5 mm,ro=52.5 mm。
经优化的电磁线圈几何尺寸典型值如图5所示。其中,图5a为优化最佳值ri/ro=0.527时的典型值,图5b为实际选用的经济实用值ri/ro=0.425时的典型值,可见ri与ro比值对线圈质量影响较小。
图5 线圈几何尺寸典型值优化结果Fig.5 Results of the characterization of the coil geometry
2.2 迭代映射方法的验证
为了验证如图4所示的在线迭代映射方法对非线性磁场测控的准确性,按线圈模型优化设计后的参数值制造出了电磁线圈,通过霍耳效应传感器和特斯拉磁场测量仪在全部可操作的电流范围内、距离z为10 mm处,测量了磁场的B(z,I),得到了电磁线圈电流产生磁场的典型值。
对ARMM系统指定某一位置,然后测量在参考给定值下产生的磁场轨迹中各点的磁感应强度和梯度。磁感应场强度直接用Senis 3MH3A-500MT特斯拉测量仪测量,配置如图6所示。

图6 磁感应强度的测量配置Fig.6 Setup used to measure magnetic induction intensity
ARMM系统的磁场梯度则用测力传感器K3D40间接测量。因为测量结果就是作用在已知磁偶极矩的永磁体上的磁力,所以可以再转换为对应的磁场梯度,配置如图7所示。

图7 磁场梯度的测量配置Fig.7 Setup used to measure magnetic field gradient
3 实验与结果
在验证实验中,利用在线更新迭代映射方法按参考给定值生成了3个磁场轨迹,在z=200 mm处、z=0.1 mm处和z=0.2 mm处的磁感应强度、梯度与电流的实际测量结果如图8所示。
图8 磁场轨迹中的磁感应强度、梯度与电流实际测量结果Fig.8 Actual measurements for magnet field intensity,gradient,current of trajectories
经过测量,ARMM系统在最大半径为1 300 mm的球形工作空间内产生的磁感应强度不小于20mT,磁场梯度大于0.6 mT/mm;在近距离z<50 mm范围内,可以产生的最大磁感应强度大于80 mT。在覆盖所有轨迹的测量值中,磁感应强度的平均误差为2.34%,梯度的平均误差为7.2%。电磁线圈在|I|<15 A线性区域内和|I|>15 A的非线性区域内,测量误差没有显著差异。
由此验证,在ARMM系统的非线性磁场处理环节运用雅可比逆矩阵和在线更新迭代映射方法是能够按参考给定值来产生驱动导管运动所需要的磁感应强度和梯度的。
4 展望与改进
在ARMM系统中,迭代映射方法仅完成了对磁感应强度及其导数的闭环控制,而导管头部位置控制才是柔性手术器控制系统最关键的环节。若要对导管进行实时闭环控制,还需要用形状感应技术将导管的姿态和头部位置参数作为控制系统的反馈信息。
4.1 磁导管的形状感应
目前,基于模板的跟踪方法和卷积神经网络应用已成为成像方式估计导管姿态的潜在技术[8]。而基于光纤布拉格传感器配合基于视觉的跟踪技术的综合性观测器也被设计出来[9],它通过插入光纤布拉格传感器的测量值,把多核光纤光栅和超声成像相结合,从而获得发生在导管上的应变,得到导管的曲率和方向,将导管的动力学状态近似化为线性非时变模型后即可把一个伦伯格状态观测器和一个卡尔曼滤波器应用到传感器融合的算法中,利用分析技术提高跟踪精度。
4.2 磁导管头部位置的闭环控制
虽然图像跟踪技术已被用于临床图像模式,可以为介入式手术器的控制系统提供手术器的位置[6],但由于开环控制对表现出非线性行为的磁导管的运动控制在实际应用中有时是失效的[1],因此磁导管的位置需要通过光纤布拉格传感器或电磁跟踪方法来确定并构成闭环控制[10],通过光纤光栅传感器测量导管的应变来计算已集成在导管中的纤维的曲率和扭转,对导管的形状使用Frenet-Serre方程进行重构。
在对非线性模型的闭环控制中,控制器可以根据导管形状传感器的反馈信息,以估计的导管位置、导管磁偶极矩值和假刚体构型的形式向BigMag系统提供参考磁场和导管插入速度。这种基于假刚体模型提出的闭环控制方法虽然已经过了验证[11],但由于假刚体模型忽略了机械手动力学和机械手与软组织的接触力,因而控制器的带宽受到了限制,需要用力传感技术对控制器进行扩展。
为了对手术器定义一个特定运动程序中的工作空间,还需要进行深入的运动学分析。虽然集成不同的传感器技术可以获得导管的准确位置[10],但要使可移动线圈始终安全地贴近患者的皮肤,还应该研究和应用路径规划算法以及避免碰撞算法[12]。
4.3 磁驱动能力的提高
如果借鉴BigMag驱动系统[11],将一组6个可移动电磁线圈排成阵列,放置在2个可移动夹具中,从而构成一种磁驱动系统装置,其参数就是6个线圈的电流和2个夹具的位置,磁场则由每个线圈遵循叠加原理而产生。如果BigMag系统的线圈阵列概念与ARMM系统可移动线圈方案结合成功,则可以提高系统的磁驱动能力并扩展磁驱动工作空间。
5 结论
在ARMM系统设计中采用带铁心的可移动线圈,通过优化设计能够最大程度地提高在有效载荷和散热约束条件下的目标区域内的磁感应强度;运用雅可比逆矩阵和在线更新迭代映射方法可以处理移动电磁线圈的非线性磁场问题并按参考给定量产生磁驱动系统所要求的磁感应强度和梯度,在较大半径的球形工作空间内为柔性手术器提供磁驱动。
虽然移动线圈电流与磁场的非线性关系对磁驱动系统性能的影响有限,但却不可忽略。在后续的ARMM系统开发设计中,需要应用扩展的雅可比矩阵来求解磁感应强度和梯度的方向,消除磁滞特性的影响,尝试和运用前瞻性技术来解决柔性手术器的磁导管形状感应和头部位置闭环控制问题,进一步提高磁驱动能力并扩展工作空间。
