考虑非线性因素的飞机防滑刹车系统控制
2022-06-21陈希远王浩天严小双杨建忠
陈希远,王浩天,严小双,杨建忠
(中国民航大学安全科学与工程学院,天津 300300)
1 引言
飞机防滑刹车系统(aircraft anti-skid braking system,ABS)是确保飞机安全着陆的重要的飞机子系统,并且随着航空事业的发展,飞机正朝着高速度、大吨位的方向不断发展,使用稳定和高效的防滑刹车控制策略对提高飞机地面安全性有着重要意义[1].飞机的刹车过程是一个具有强非线性的过程,例如,跑道条件的变化、刹车环境的变化等[2],且飞机着陆时间很短,大约为20 s,从国内外的统计数据看,着陆刹车阶段发生的事故在各种飞机安全事故中的占比高达49.1%[3],对飞机防滑刹车系统的设计提出了严峻的挑战.
飞机防滑刹车系统始于20世纪40年代[4],最早期的飞机防滑刹车系统是俄罗斯的惯性防滑刹车系统,其最大的优点是可靠性高,但因其也存在刹车效率低、刹车不平稳、刹车距离长等缺点,欧美开始研制更高效的电子防滑刹车系统,并形成了基于开关式、速度差式、滑移速度和滑移率式4种主要的防滑刹车方式[5-10].现行装机最为广泛的是PD+PBM 控制律,是一种速度差式的控制律,其具有安全可靠的优点,但是PD+PBM是一种设定参考速度固定减速率和相应的门限值,再根据机轮速度和参考速度的速度差与门限值的比较结果来调节防滑电流的控制律,这种设定固定减速率和门限值的方式难以适应刹车过程当中的非线性因素,会导致地面结合力利用不充分,低速打滑等缺点[11],难以适应现在对飞机防滑刹车系统发展的高性能要求.针对传统“PD+PBM”控制律中存在的低速打滑以及地面结合力利用不充分的问题,学者们已经开展了很多研究,刘文胜等人提出了一种结合免疫PID 控制和模糊控制的新型控制策略[12],罗林提出了遗传算法优化的模糊神经网络PID控制策略[13],付龙飞等人提出一种基于反馈线性化的防滑刹车滑模变结构控制律[14],陈洁等人提出了模糊PI+模糊ID控制律的设计方法[15].在这些研究中,将神经网络、反馈线性化、滑模变结构控制等非线性控制理论运用于飞机防滑刹车系统的控制律设计中,相较于传统的PD+PBM控制律,能更好的适应飞机防滑刹车系统的非线性特性,提高了刹车效率,改善了控制品质.然而,在这些研究中,通常假设飞机速度已知,但是实际飞机速度是无法直接测量的.另一方面,上述研究中对于刹车系统中非线性因素大多进行了近似线性化处理,所设计的控制律无法很好地适用于真实飞机刹车系统.
轮胎-跑道间结合系数的变化会导致地面结合力的变化,刹车盘摩擦系数的变化会引起刹车力矩发生改变,因此这两种非线性因素会影响飞机防滑刹车系统的刹车性能,也是飞机防滑刹车系统的主要非线性来源[16],因此本文首先建立了飞机防滑刹车系统动力学模型,在此基础上建立了轮胎-跑道非线性模型与刹车盘摩擦系数非线性模型,形成了飞机防滑刹车系统的非线性整体模型;针对飞机速度无法直接测量的问题构造了飞机速度的滑模观测器,用观测所得的飞机速度与传感器测量所得的机轮角速度计算滑移率;运用滑模变结构控制理论设计了滑移率式的飞机防滑刹车系统控制律;针对滑模控制律中存在控制器输出抖振问题运用模糊理论进行优化以抑制抖振,并通过仿真验证了控制律的效果.
2 系统建模
2.1 飞机着陆滑跑动力学建模
2.1.1 飞机机体动力学建模
本文仅考虑飞机的纵向、垂直和俯仰运动,并做出以下合理假设[6]:
1) 将刹车控制简化为单机轮、单通道的控制.
2) 将飞机的机身和起落架视做理想刚体,不考虑飞机机体出现的弹性变形.
3) 不考虑侧风对于飞机防滑刹车系统的影响.
4) 以地面跑道作为惯性坐标系.
5) 只考虑轮胎的垂直方向形变.
根据以上假设,则飞机的地面滑跑受力分析图如图1所示.
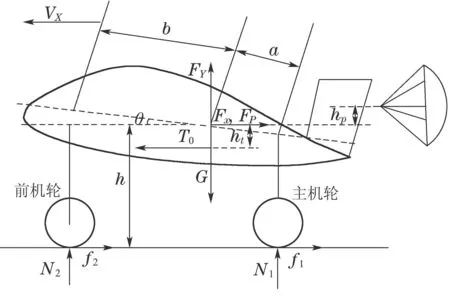
图1 飞机地面滑跑受力示意图Fig.1 Sketch of the force on the aircraft during ground running
飞机着陆后在地面滑跑的受力情况如图1所示,飞机在纵向受到的力有发动机推力T0、空气阻力Fx、阻力伞阻力FP、前机轮和主机轮所受到的地面结合力f1和f2,飞机在垂直方向所受到的力有重力G、飞机升力FY和前机轮和主机轮所受到的支持力N1和N2,a为飞机重心到主轮中心的水平距离,b为飞机重心到前轮中心的水平距离,hp为阻力伞悬挂点距飞机水平轴上移距离,ht为发动机推力线距飞机水平轴下移距离,I为飞机主机轮转动惯量,θ为飞机俯仰角,VX为飞机的纵向滑跑速度,VY为飞机垂直方向速度,kv为发动机推力系数.
则根据刚体定轴转动定律和牛顿第2定律可得
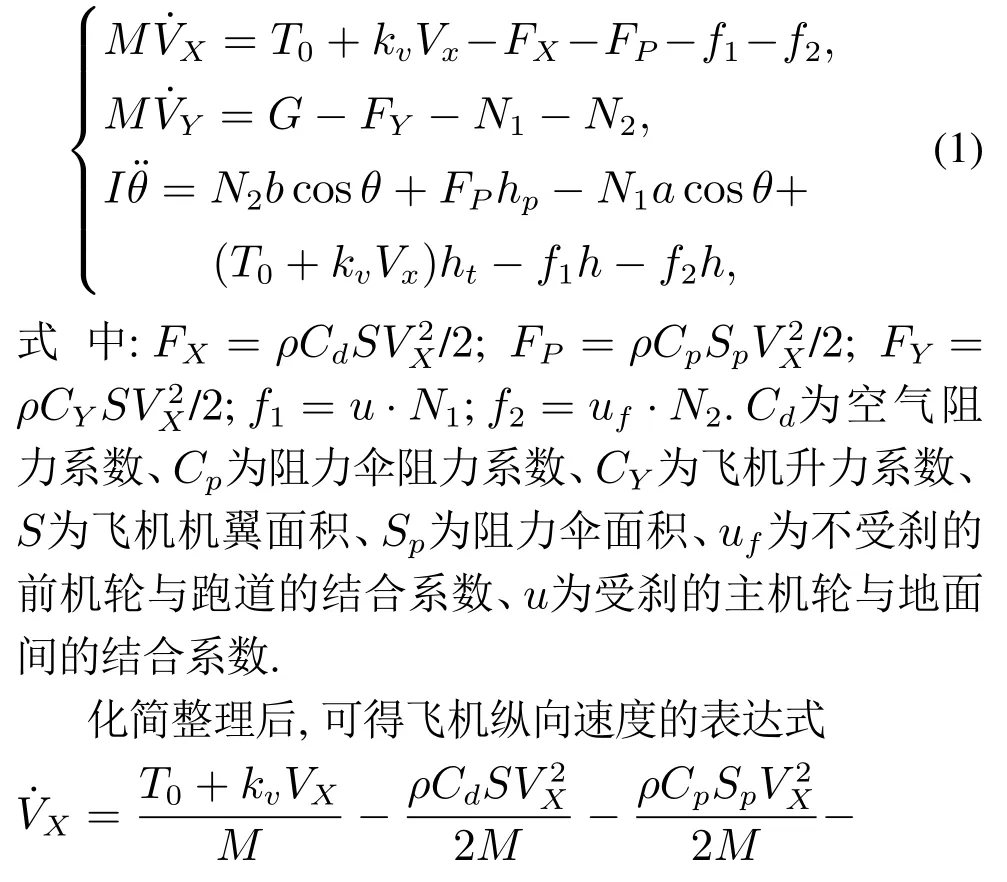

在式(2)中,结合系数u随飞机状态以及跑道条件的变化呈现非线性变化,因此需建立其非线性模型(第2.2节).
2.1.2 飞机机轮动力学建模
飞机降落后进行地面滑跑刹车的过程中,刹车力矩作用在主机轮上,主机轮刹车过程中运动方程可以描述如下:

式中:J为单个机轮的转动惯量;ω和˙ω为飞机机轮的角速度与角加速度;Rvb为飞机滑跑时机轮的滚动半径;Kb为刹车盘摩擦系数;Pb为刹车压力,即单个机轮的转动惯量与机轮角加速度的乘积等于主机轮上所受到的刹车力矩与结合力矩之差.进一步整理化简,可得
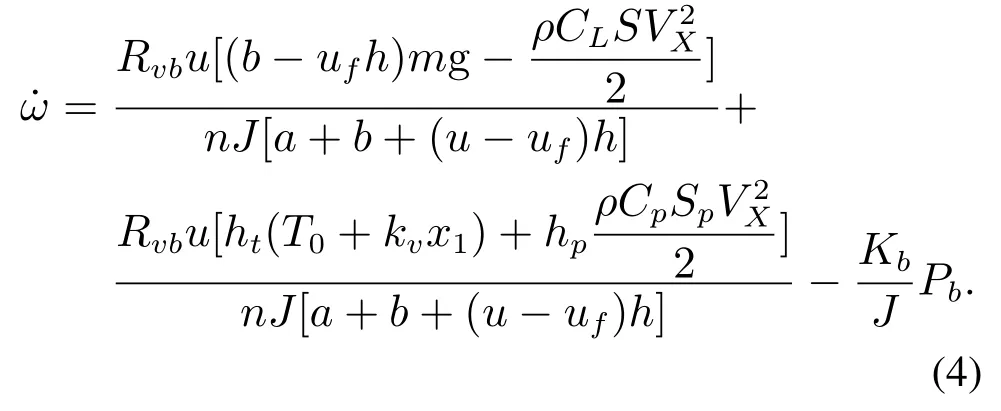
在飞机机轮动力学模型式(4)中,刹车盘摩擦系数Kb随飞机状态的改变呈非线性变化,刹车盘摩擦系数非线性模型见第2.3节.
2.2 轮胎跑道非线性模型
轮胎与跑道之间的结合系数随着飞机刹车的过程呈现复杂的非线性变化特征,与跑道条件和飞机状态都相关.飞机的刹车系统工作时,当轮胎与跑道之间的结合系数达到峰值时,轮胎与跑道间结合力最大,刹车距离最短,刹车效率最高.所以轮胎-跑道结合系数对于飞机防滑刹车系统的刹车性能具有重要的影响.主轮结合系数受到多种因素影响,其中跑道条件与飞机的滑移率为主要的影响因素.主轮结合系数等于主轮结合力与主轮所受地面支持力的比值,即µ(λ,φ)=(F(λ,φ)/N1).式中λ为飞机滑移率,其定义为λ=(Vx −ωRvb)/Vx,φ代表跑道条件,其取值为1时代表干跑道,取值为1.25时代表湿跑道,取值为2.5时代表冰跑道[18],µ(λ,φ)即为式(2)中受飞机滑移率和跑道条件共同影响的结合系数,F(λ,φ)为主机轮所受到的地面结合力.
本文采用Lugre模型来描述轮胎-跑道之间的摩擦特性.Lugre模型的理论解释简单,参数的物理意义明确,并且大量研究和应用成果显示Lugre模型是所有理论模型中表现最好的一个,特别在对脱离摩擦力和摩擦滞后现象方面的建模具有其他模型无法比拟的优势[1].分布式Lugre摩擦模型如图2所示.

图2 分布式Lugre摩擦模型Fig.2 Distributed Lugre friction model
其表达式如式(5)-(7)所示[18]:
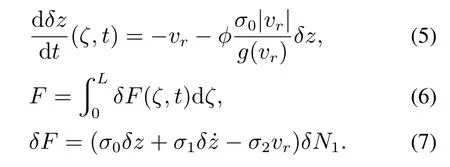
式(5)-(7)中,F为轮胎与跑道间结合力,z代表内部摩擦状态变量,σ0为刚度系数,σ1为衰减系数,考虑到粘滞摩擦的情况下引入参数σ2,此参数是与相对速度成正比的系数.ζ代表水平轴,其导数即为机轮的线速度−Rvbω.而函数g(vr)是为了捕捉与方向相关的动态行为,通常形式为g(vr)=其中vr=Vx −ω·Rvb,uc为标准干摩擦系数,us是静摩擦系数,vs是Stribeck相对速度,φ代表跑道条件,具体的参数数值见表1.
表1 分布式Lugre模型参数Table 1 Distributed Lugre model parameters
对式(5)-(7)进行整理、化简,即可得出结合系数µ(λ,θ)的表达式,即描述结合系数和跑道状态与飞机滑移率之间非线性关系的数学模型

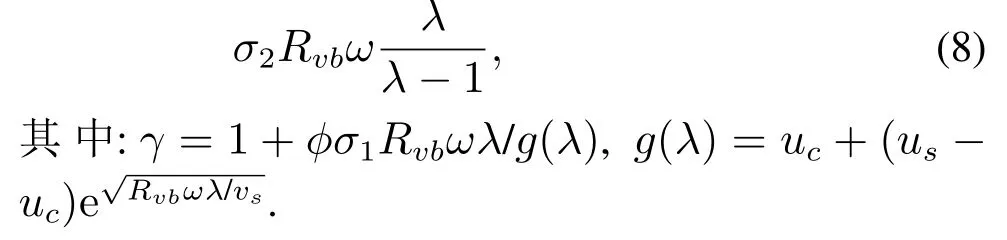
由式(8)分析可得,结合系数µ(λ,θ)随跑道条件φ和滑移率λ共同影响,当跑道条件φ固定时,µ(λ,θ)存在一个极值,在该极值下飞机的刹车效率最高,而µ(λ,θ)到达极值时对应的飞机滑移率即为最佳滑移率λd.由于滑移率是机轮角速度和飞机速度的函数,因此,只要通过控制飞机机轮角速度和飞机速度,使得滑移率保持在最佳滑移率上λd,则整个刹车过程的刹车效率最优.因此,通过建立轮胎-跑道非线性模型,生成了非线性系统的控制目标,即基于最佳滑移率λd的目标跟踪控制.
2.3 刹车盘摩擦系数模型
在整个刹车过程,大约有70%~90%的飞机动能会被刹车盘所吸收,会导致刹车盘温度快速上升,而温度的快速上升会导致刹车盘摩擦系数的呈现强非线性变化,即式(4)中的Kb,而刹车盘的摩擦系数变化会引起飞机刹车力矩发生改变进而影响飞机防滑刹车系统性能,因此这也是飞机防滑刹车系统中的非线性主要来源之一.
根据文献[17-19],建立刹车盘摩擦生热、对流散热模型,并计算刹车盘的温升,并在此基础上计算刹车盘的摩擦系数随温度的非线性变化.
在刹车过程中,刹车盘的摩擦系数随着刹车盘的温度升高先升高再下降,温度对于刹车盘摩擦系数Kb的影响如下式所示:

式中:a1,b1,c1,a2,b2,c2是相关系数.
图3为刹车盘摩擦系数随温度的变化规律,在干跑道工况下,刹车盘摩擦系数随着刹车盘温度的升高先增大再减小,在整个刹车过程中,刹车盘摩擦系数随温度的变化呈现出明显的非线性特征.
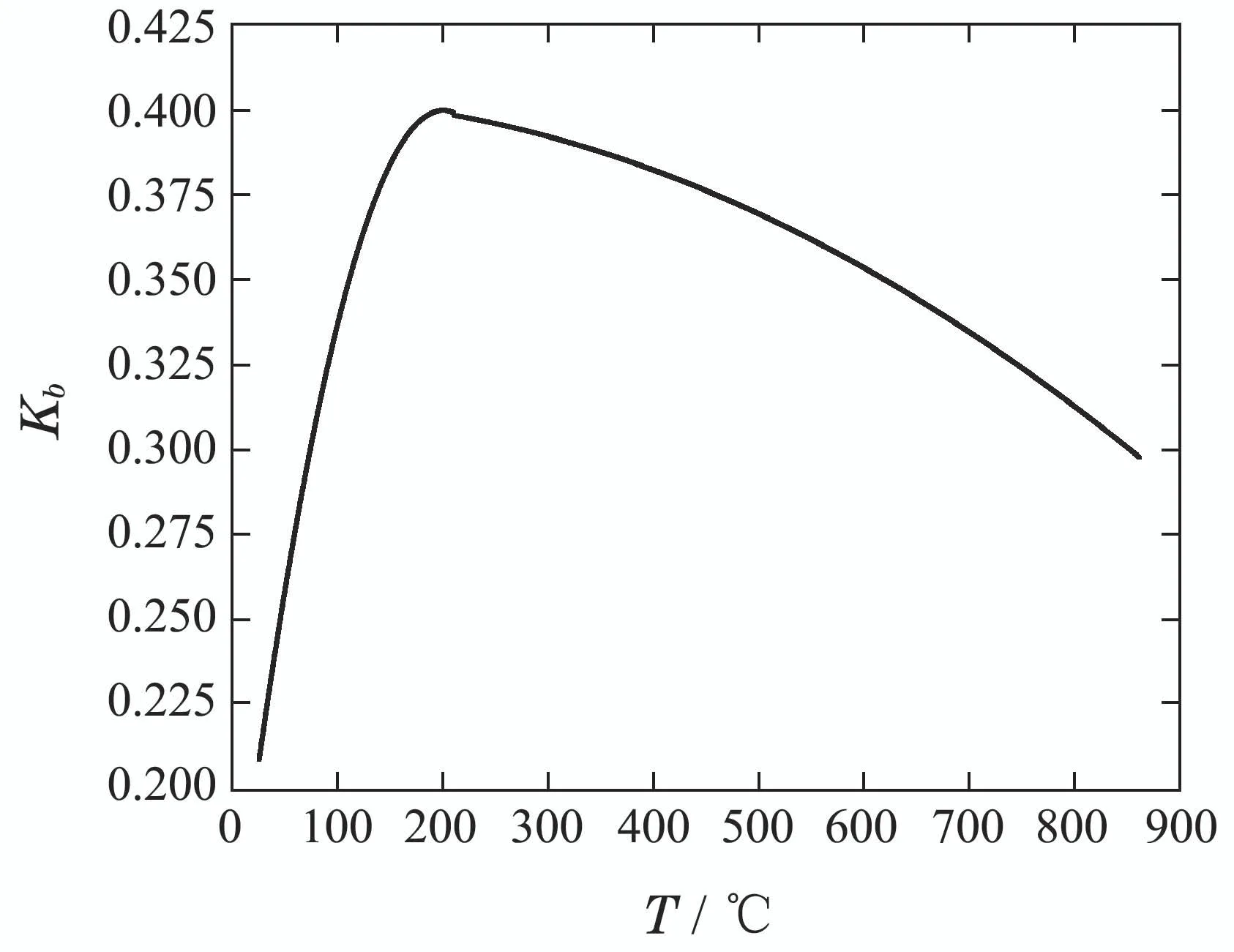
图3 干跑道工况下刹车盘摩擦系数随温度变化Fig.3 Friction coefficient of brake disc changing with temperature under dry runway condition
3 控制律的设计
3.1 控制目标的获取
在第2.2节之中,已经利用分布式Lugre模型开发出静态模型来表示路面结合系数与飞机滑移率和路面条件之间的非线性关系,即式(8).已知跑道条件的情况下,利用式(8)可以计算在不同飞机速度下的µ(λ,θ)的极值即最大结合系数µmax,其所对应的滑移率λ就是期望滑移率λd.滑移率的计算表达式如式(10)所示:

当飞机轮胎的工作状态处于期望滑移率λd时,机轮与跑道之间的结合系数处于峰值,则飞机防滑刹车系统的刹车效率最高,故飞机防滑刹车控制系统的目标就是使得飞机的滑移率λ处于期望滑移率λd[1].由式(10)可知滑移率的计算需要飞机速度Vx以及飞机受刹机轮的机轮角速度ω,飞机上装有机轮角速度传感器,而飞机速度则是不易获取的,因此需要设计飞机速度观测器以观测飞机速度计算滑移率.
3.2 滑模观测器的设计
试验已经证实,基于滑移率式的防滑刹车系统控制律具有较高的刹车效率,以往基于滑移率的控制方式中,飞机速度通常用自由滚动的前机轮线速度近似,其精度难以满足飞机防滑刹车系统的高性能要求,本文应用文献[20-21]提出的滑模观测器理论设计一种飞机纵向速度的滑模观测器来观测飞机速度以进行滑移率的计算.
把建立的飞机防滑刹车系统写成式(11)表现的系统形式,则有飞机防滑刹车系统的系统模型为

式中:x1为机轮角速度ω,x2为飞机纵向速度Vx,由式(2)(4)可得
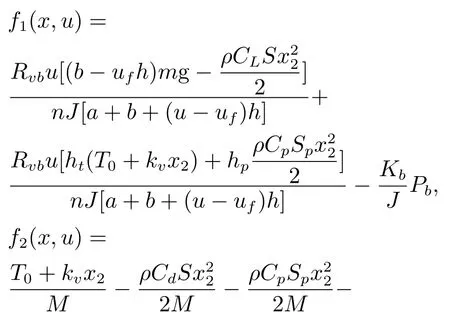

建立滑模观测器如下:

根据李雅普诺夫第2方法,当k1>|Δf1|时,即可满足滑模面到达条件

即s=在有限时间内收敛于零,由此来确定满足式(13)的k1值,此时观测的机轮角速度收敛于真实机轮角速度.
由于式(13)右侧具有不连续项,根据Filippov的等效动态理论[22],式(13)可等效为系统在滑动面两侧两个系统的凸组合,如式(15)所示:

由此可以求得ξ=(k1−Δf1)/(2k1),将其代入式(15)的第2个式子,可以求得


则根据线性系统理论中极点配置原则,当k2满足:

的特征值具有负实部时,式(18)中的飞机速度观测误差渐进稳定.
综上,将k1>|Δf1|和的特征值具有负实部两个条件进行联立,并求解满足联立条件的观测器参数k1和k2.
图4是在干跑道条件下飞机速度的观测效果4,算例中飞机落地初始速度为72 m/s,滑模观测器飞机速度的初始设定速度为68 m/s.可以看出,滑模观测器可以实现对飞机速度的准确观测.
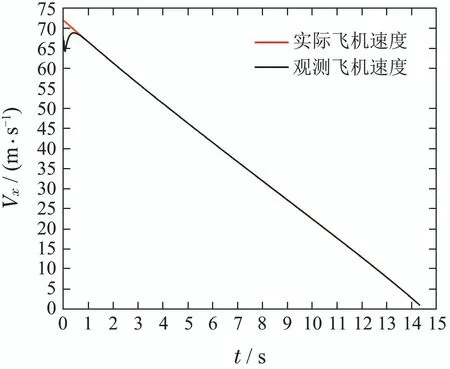
图4 实际飞机速度与飞机速度观测值Fig.4 Actual aircraft velocity and observed value of aircraft velocity
3.3 滑模控制律的设计
为了便于进行控制律的设计,将飞机防滑刹车系统模型写成如下形式:

λd为期望滑移率,控制器的控制目标是使得飞机轮胎的滑移率λ保持在期望滑移率,即λ →λd,滑移率与期望滑移率的差值e=λd −λ,则有

由式(24)可以反解得控制输入

运用李雅普诺夫第2方法证明,对于系统(19),在控制输入式(25)的作用下,滑动模态存在且可达.

3.4 利用模糊理论对于滑模控制进行优化
由于指数趋近律˙s(x)=−εsgns −ks(ε >0,k>0)中的符号函数会给系统带来抖阵,想要有效的抑制高频颤动,必须取较小的ε,但是较小的ε又会使得飞机防滑刹车系统进入滑动模态的时间增长,则会削弱滑模控制的动态品质.与此同时,由式(24)可以看出,飞机防滑刹车系统状态空间模型的控制输入u为刹车压力,增大k值虽然可以加快趋近速度,但是当|s|较大时会增大所需要的刹车压力.为了解决在飞机防滑刹车系统上应用滑模控制时存在的上述问题,本文设计了模糊指数趋近滑模控制律,以便使得到达段的控制品质得到提高,模糊指数趋近律为

式中:ε和k由模糊方法确定,θ1和θ2为模糊控制量的上限值.
对于设计的模糊指数趋近律中和的选取应遵从以下3个原则:
1)θ1ε和θ2k的选取不应改变原指数趋近律的收敛性,即需要仍然满足滑模到达条件;
2)θ1ε对应于原指数趋近律的等速趋近项,等速趋近项用于系统的状态指数收敛到滑模面附近时仍然保持一定速度到达滑模面,并且在|s|较小时不宜取的过大,过大会造成系统抖振严重;
3)θ2k对应于原指数趋近律的指数趋近项,增大此项可加快收敛速度并且削弱抖振,但过大的θ2k会造成过大的刹车压力输出,因此在|s|较大时θ2k应取较小的值.
θ1和θ2为模糊指数趋近律的上限值,θ1ε和θ2k的最终取值由ε和k来最终确定.为了不改变原指数趋近律的收敛性,ε的取值范围是(−1,1),且当|s|大于0时,ε取值为负,|s|小于0时取值为正;k的取范围为(0,1).ε和k的具体取值由依据和的选取原则制定模糊规则后所建立的模糊控制器输出得到.
当s <0时,可以解得s(t)=,由此可以看出减小ε,增大k可以加快趋近过程,并减小抖振.但是,由控制律式(25)-(26)可以看出,当|s|较大时,选择较大的k就会产生较大的控制器输出u即刹车压力,这是需要避免的.从以上的定性讨论可以得出结论,在|s|较大时,应选取较大的ε和较小的k值,这样可以在保证具有满意的滑模趋近速度的同时避免控制器产生过大的控制器输出u;而在|s|较小时,选取较小的ε和较大的k值,这样能保证系统具有一定趋近速度到达滑模控制面的同时抑制控制器的抖振现象.
以sn=s作为模糊控制器的输入,ε和k分别为模糊控制器的输出.定义ε和k的语言值为:{PB,PM,PS,Z,NS,NM,NB}.分别代表正大、正中、正小、零、负小、负中、负大.k的语言值为:{PS,PM,PB},分别代表正小、正中、正大.其中sn论域为[−30,30],由于在式(26)中,θ1和θ2为模糊控制量的上限值,并且为了保证模糊指数趋近律与指数趋近律的正负号相同,故定ε的论域为[−1,1],k的隶属函数论域为[0,1].
基于以上的定性分析,定义模糊控制规则如表2所示.

表2 模糊控制规则表Table 2 Table of fuzzy control rules
根据控制规则,并采用重心法(加权平均法),可以将模糊控制器输出转化为精确的控制量:
式中B和C分别为ε和k的隶属函数.
将选取好的θ1ε和θ2k代入式(25),可以得到飞机防滑刹车系统的模糊滑模控制输入为
仿真中将跑道条件设置为干跑道,两种控制律下飞机的初始速度为72 m/s,对两种控制律下的刹车压力进行比较.仿真中将跑道条件设置为干跑道,两种控制律下飞机的初始速度为72 m/s,对两种控制律下的刹车压力进行比较.
图5 是干跑道条件下传统滑模控制律(sliding mode control,SMC)和设计的基于模糊指数趋近律的滑模控制律(fuzzy sliding mode control,FSMC)的控制器输出对比,可以看到在干跑道条件下,FSMC控制律的刹车压力输出平滑,能很好的抑制SMC控制律中存在的控制器输出抖振,运用模糊理论抑制抖振的效果良好.
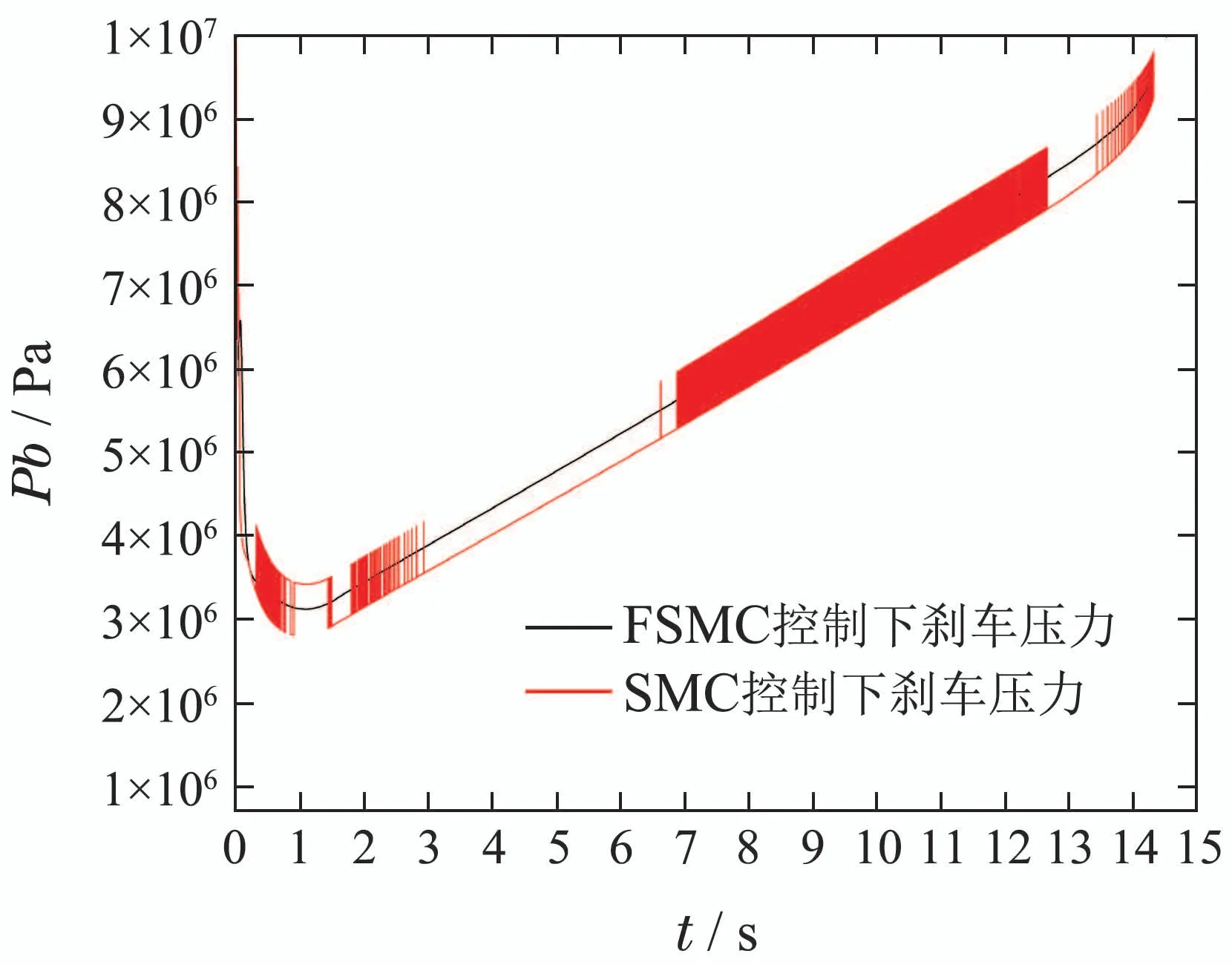
图5 干跑道条件下两种控制方式刹车压力对比Fig.5 Comparison of braking pressure between two control laws under dry runway conditions
4 系统仿真与结论
使用MATLAB/Simulink仿真软件进行仿真,仿真步长为0.001 s,计算方法使用四阶龙格库塔法.机轮的初始速度为72 m/s,仿真在干跑道和湿跑道两个工况下进行.
在刹车初期,飞机刚接触地面,机轮速度和飞机速度较高,为中高速段,随着刹车控制系统的作用,飞机速度和机轮速度逐渐减小,开始进入低速段,直至飞机速度和机轮速度减小至零,代表刹车过程完成.在整个刹车过程中,滑移率将直接影响刹车效率的优劣,因此,本文对整个刹车过程中不同控制律下的滑移率进行对比.
在本节中用所设计的FSMC控制律与现行应用最为广泛的PD+PBM控制律控制下的刹车性能进行对比.PD+PBM控制律是一种速度差加压力偏调的飞机防滑刹车系统控制方式,其原理是将飞机的机轮速度与设定的参考速度相比较,根据速度差和预先设定的门限值的比较结果来输出防滑电流.PD+PBM控制律本质是多门限的PID控制,其比例级、微分级有各自的门限,积分级与常规的微分级不同,该积分级即可以增加,又可以减小,称之为压力偏调级,简称PBM[23].
从图6-7中仿真结果可以看出,由于飞机刹车是一个具有强非线性的过程,在考虑了两种飞机刹车过程中主要的非线性,即轮胎-跑道结合系数非线性和刹车盘摩擦系数的非线性的情况下,在干跑道、湿跑道两种工况下,PD+PBM这种设置固定门限值和固定减速率的飞机防滑刹车系统控制律难以适应刹车过程中的非线性因素,难以实现对最佳滑移率的跟踪,刹车效率较低,在刹车过程末尾的低速段,出现了较为明显的低速打滑现象;而本文通过建立轮胎-跑道非线性模型,从而获取刹车过程中的滑移率控制目标,所设计的FSMC控制律能够适应刹车过程中的非线性因素,从而实现对最佳滑移率的目标跟踪控制,在整个刹车过程中,能够始终将飞机保持在最佳滑移率上,能够获得最大的刹车效率.相比于现行使用最为广泛应用的PD+PBM控制律,设计的FSMC控制律具有更好的鲁棒性,刹车时间和刹车距离更短,提高了刹车效率,有效解决了PD+PBM控制律中存在的低速打滑现象.
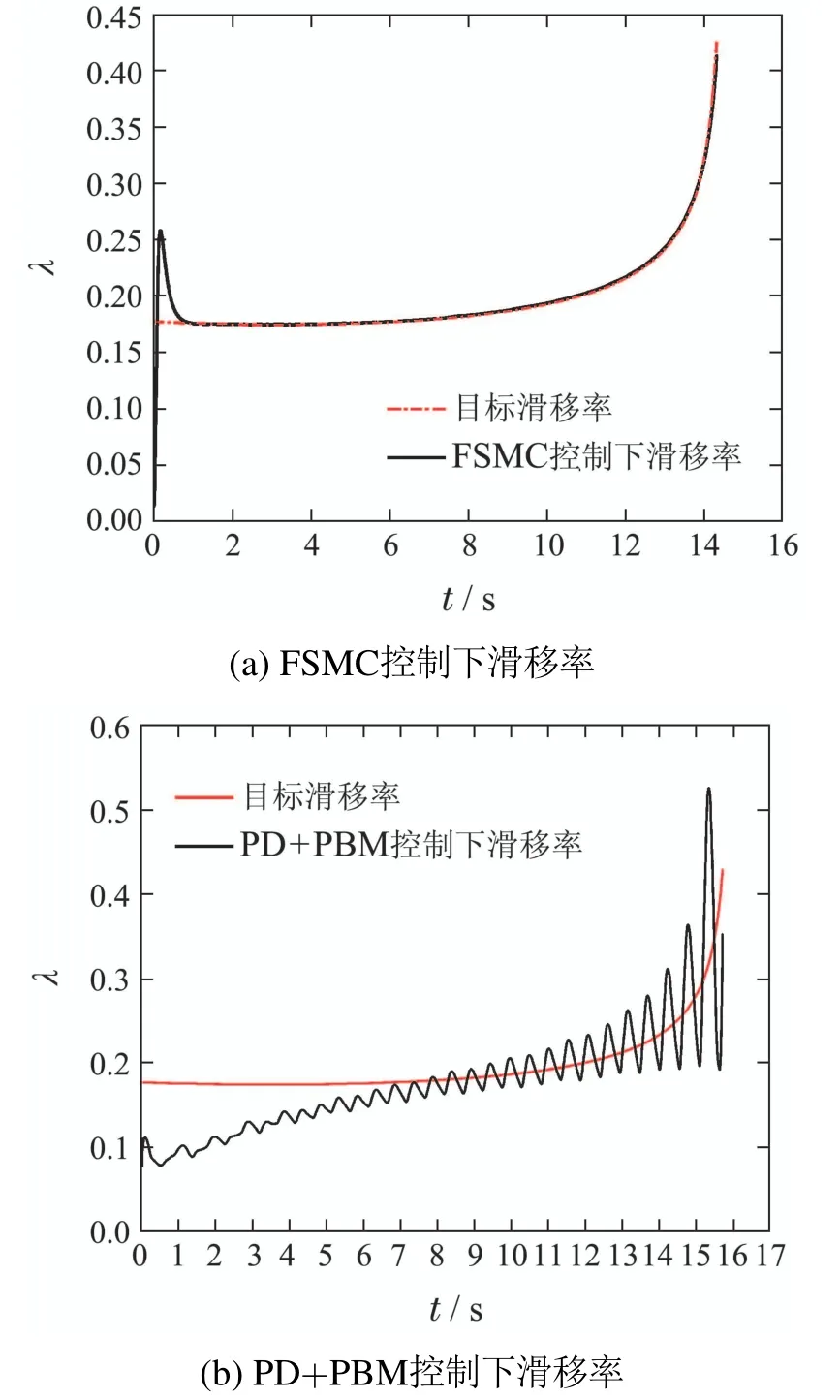
图6 干跑道条件下FSMC和PD+PBM两种控制方式下的滑移率对比Fig.6 Comparison of slip rates between FSMC and PD+PBM control laws under dry runway condition

图7 湿跑道条件下FSMC和PD+PBM两种控制方式下的滑移率对比Fig.7 Comparison of slip rates between FSMC and PD+PBM control laws under wet runway condition
5 结论
本文建立了飞机防滑刹车系统的整体非线性模型并进行了仿真,形成以下结论:
1) 构造的滑模观测器对于飞机速度具有快速良好的观测性能;
2) 运用模糊理论能有效的抑制滑模控制律中固有的控制器输出的高频抖振现象;
3) 在对干、湿跑道两种工况的仿真结果表明,所设计的FSMC控制律能够很好的适应飞机刹车过程中的非线性因素,最大程度的利用跑道的结合力;
4) 设计的FSMC控制律解决了传统的PD+PBM控制律中存在的低速打滑,鲁棒性差的问题,设计的控制律合理有效,刹车效率高.
