北方高寒地区高速公路和城市道路除冰雪机械的研究
2022-06-21孙潘罡迟树廷
孙潘罡 陈 松 迟树廷
(1.青岛工贸职业学校,山东 青岛 266041;2.黑河市农机研究所,黑龙江 黑河 164300)
1 研究背景
我国北方高寒地区常年低温,冬季漫长。高速公路和中小城市(包括乡镇)的除冰雪问题没有完全解决。一是在严寒条件下,有些公路路段坡度大,机械除冰很难解决积雪不及时清除、反复形成冻融冰层的问题。二是机械故障率高。除冰雪工作部件作业时与地面硬接触,对路面损伤严重,并且故障不断,不能正常作业。三是除冰雪设备的研发资金投入不足。四是环境污染。有些道路在机械清除冰雪质量不达标的情况下,还要辅助撒盐和溶雪剂,导致环境污染。
从2010年以来,国内部分大城市批量引进了国外大型除冰除雪机械。这些机械效率高、作业质量好,但是价格高,维修保养困难。如加拿大RPM公司生产的P-500-R、TM-350、A90、LM-220、T220-B除冰除雪机,德国奔驰公司生产的SCHMID等型号专用除冰车,价格一般在300万~500万人民币。瑞典VOLVO公司的220/60除冰机在国内应用较多。而且这些价格昂贵的机械主要还是用于机场和大城市的专用场地,中小城市街道和高速公路作业迫切需要效率高、成本低、自动化控制能力强的新型除冰雪机械。
2 研发要点
研究新型除冰雪机械,主要攻关目标是除冰。而除冰主要是解决高速公路和中小城市街道的结冰问题,尤其是高寒地区封冻时间长,雪量大。黑龙江北部和内蒙古东部有长达130天~160天的结冰期。高速公路收费站及服务区距离远,遇到大雪结冰,堵车关闭高速是经常的事。而且有些地段坡度大,急转弯,有长达几千米甚至十几千米的坡度路段。在高速公路上除冰,要求作业时不能长时间占用车道,空驶速度及作业速度要快,清理过的冰雪必须及时推送到路下,防止出现作业占道和冰雪清后占道。
根据这些特点,对高速公路和中小城市除冰雪机械的基本技术要求如下。一是速度快。不仅要求作业速度快,而且空驶速度快,即作业速度要求2m/s以上,空驶速度8m/s以上。二是不能长时间占用行车道。作业幅宽要求2.2m以上。三是有较强的爬坡作业能力。四是适应凹凸结冰地面,特别适应弯道偏斜结冰路面。五是有自动化控制功能,完成驾驶员一键控制操作。
3 新机型总体配置与关键部件结构设计
3.1 选择配套动力
根据本机设计要求,一是动力要在110kW~147kW。根据目前我国动力机械现状,有2种动力机型可优先选择,分别是四轮驱动大功率拖拉机和大功率装载机。拖拉机动力输出要靠动力输出轴输出,液压泵功率小,不便于与自动化控制。大功率装载机,没有动力输出装置,液压泵输出功率大,便于自动化控制。二是要有较强的爬坡能力和较快的运输空载速度。选择ZL70型装载机是因为该机型有四轮驱动坡度作业爬升驱动力大、液压系统流量大、压力高的特点,可将装载机翻斗液压油缸油路连接到除冰雪机械的油路。该机型液压系统压力为15MPa,排量152mL/r,流量335 L/min,可以满足作业要求。三是能够一机多用,提高机械综合使用效能,改装方便,冬季改装成清冰雪状态,其他季节可以恢复装载作业状态。在我国北方地区,ZL70装载机应用广泛,保有量大,便于配套。且三点悬挂互换简单,很容易改变机型。液压马达驱动传动简单,便于自动化控制。
3.2 装载机除冰台平衡问题
大支臂两侧装有平衡弹簧组,用于平衡除冰台质量,减少除冰台对地面的压力强度。拉力行程150mm,最大拉力3000N。
3.3 装载机作业电磁阀控制
内装有4联电磁比例换向阀。装有PLC程序控制雪台工况的组合。装有其他辅助控制的AD转换及先导液控电磁转换机构。输入端包括霍尔转数传感器、油缸拉力传感器、除冰辊平衡臂扭矩传感器、手动输入传感器等。输出端包括除冰辊升降油缸、除冰台升降油缸、除冰辊马达、扫雪除冰辊马达。
3.4 机架结构
由高强度矩形管焊接组成,后端通过三点悬挂链接装载机,机架前端连接除冰辊、扫雪除冰辊。上部连接除冰辊轮。除冰辊、扫雪除冰辊、平衡臂、后端连接装载机支臂。下部连接支撑浮动轮。
3.5 除冰辊组合
除冰辊装置是该机核心部件,如图1所示,技术要求双侧液压马达驱动,除要求是机器前进速度的3~4倍。前进速度设置在2.2m/s~2.8m/s。V=3V~4V,即4V×2.8m/s=11.2m/s。除冰辊直径设计受结构尺寸限制,质量不能过大;又涉及离心力,也不能过小。参照扫路机参数,该机取筒直径D为420mm,齿高H为120mm,筒外缘D为660mm,作业幅宽2200mm。

因此

式中:V为冰辊线速度;r为除冰辊半径;n为除冰辊转数。
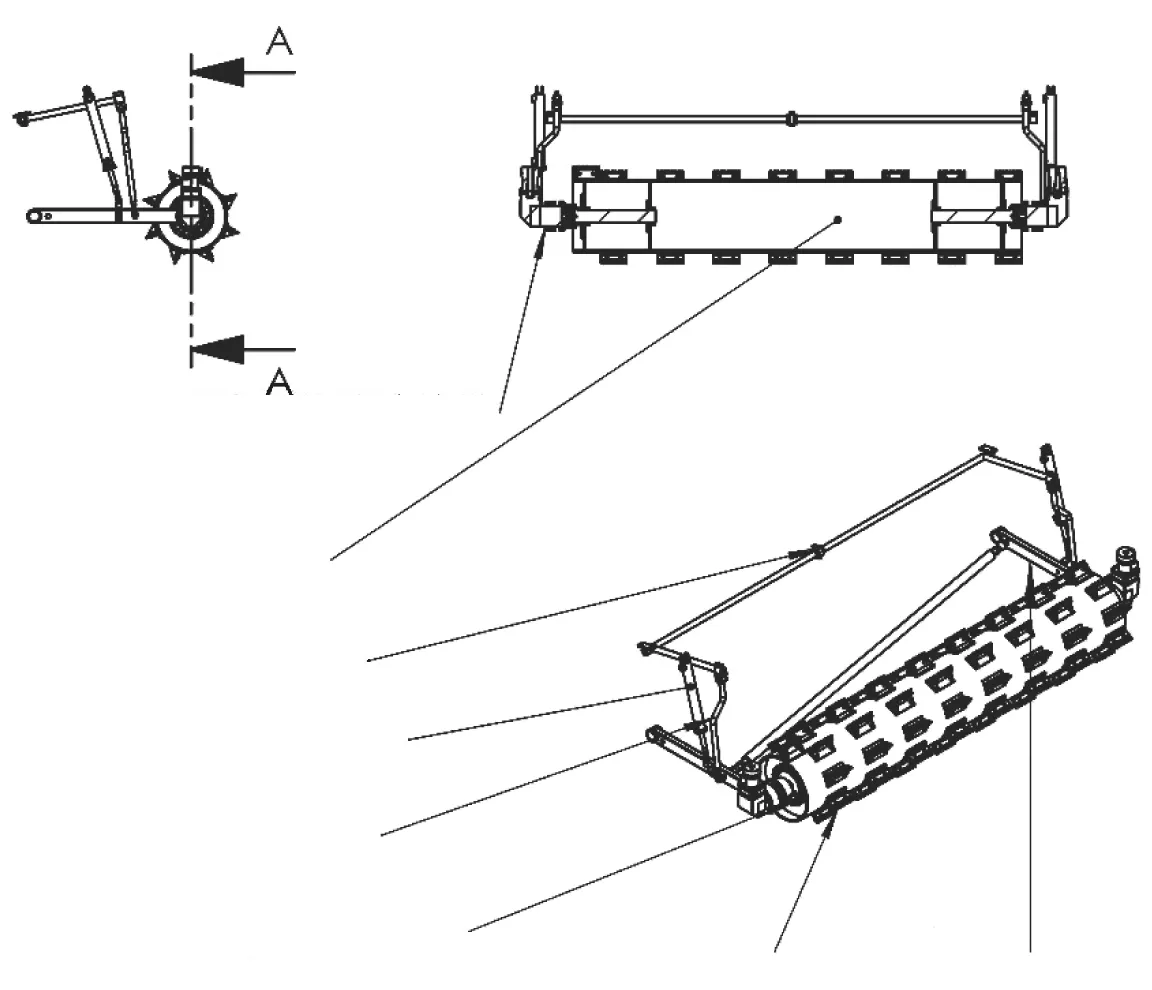
图1 除冰部件组合
根据除冰辊转数,设计要求324r/min,需要减速传动。液压马达驱动部分又是除冰辊的支撑装置,需要考虑结构强度及传动的合理性。根据国内液压马达产品种类,可选用L型液压马达。纵向为马达配置位置,横向为减速位置,横向外缘配置球型支撑链接支臂,解决了横向仿形的问题。霍尔传感器动盘安装在除冰辊支撑盘上,霍尔传感器触头通过支架连接在支撑臂上。除冰辊横向稳定器通过拉杆链接在球铰链。传感器的作用是检测除冰辊的转速,当除冰部件的阻力较小时,接触地面瞬时增加阻力可降低转数,PLC控制液压提升油缸,提升除冰辊高度。
3.6 扫冰(雪)除雪辊
该装置倾斜机架30°。除冰辊有效长2320mm,直径80mm,转数430r/min,由液压油缸高度支撑控制,后部铰链机架,液压马达驱动。由驾驶员控制该扫雪辊的高低,将除冰辊粉碎的残冰及积雪清扫到右侧路边。由于扫雪辊线速度高(设计为 18m/s)、离心力大,可将碎冰吹到隔离带外侧不占道。该扫雪毛刷及液压马达与现有的道路清扫机部件通用。
3.7 平衡臂组合
该装置是除冰辊重要的支撑和控制部件,与野轿车前桥平衡臂类似。当路面出现倾斜,一侧高一侧低时,平衡臂就会出现一侧拉伸一侧压缩的情况。平衡臂两侧装有拉力传感器。中部装有扭矩传感器,拉力与扭矩传感器模拟信号通过AD转换变数字信号。PLC将数据处理通过微动开关控制液动电磁伺服阀,由液压电磁换向阀控制左右油缸高度,使除冰辊可以自动控制高度。
3.8 仿形轮组合
2组仿形轮分别支撑于两侧机架下面,如图2所示。作业时除冰机架由该仿形轮支撑,机架高低由驾驶员通过液压系统控制。该机以液压输出功率大的装载机为配套动力,配有平衡除冰台的辅助弹簧,配有可纵向、横向仿形并液控电磁控制的除冰装置,配有扭矩、拉力、霍尔转数传感器为组合的多性能传感部件及相配套的AD转换器,以及PLC程控搭配成机电一体化自动控制的除冰机械系统。

图2 仿形轮组合
4 关键部件受力分析
4.1 分析手段和目的
应用SOLIDWORKS simulstion软件对设计进行有限元分析。求证应力应变关系,优化部件整体设计。该组件是传感器部件核心组件,左右2个拉力传感器,中间1个扭力传感器。如图3所示,传感器是贴片式黏结在拉力工件上,拉件物理变化转变电信号输入至AD转换器。传导信号又是平衡左右除冰辊受力的部件,该分析主要研究和判定结构在一定载荷下,局部是否存在应力集中状态,及其对结构的影响。
4.2 材料赋予以及对结构的简化处理
材料整体均为普Q235,弹性模量为210000MPa,泊松比为0.29。
4.3 主要部件分析
本机主要部件分析如下:1)下悬挂座分析。该部件下部销连接除冰辊,上部螺栓连接吊杆。该部件拉伸与压缩的变量,改变传感器桥式电阻变化,经AD转换输入PLC控制除冰油缸升降。该部件结构强度不能过高,不能过低。受拉伸的长度变化、轻度变化与传感器贴片相匹配。2)吊杆强度分析。吊杆用D28mm材质Q235无缝钢管制作。呈“S” 形,在加载1500N时出现如下变形:无论是拉伸和压缩,均出现塑性变形,安全系数为1.2。该设计需要进一步优化。3)平衡轴受力分析。平衡轴是指两侧平衡臂,由D33mm的Q235无缝钢管焊接组成,施加外部载荷1500N后,平衡轴与平衡臂承受的主要是扭矩,应力集中在轴与臂焊合口上,不能满足设计,需要重新优化设计。
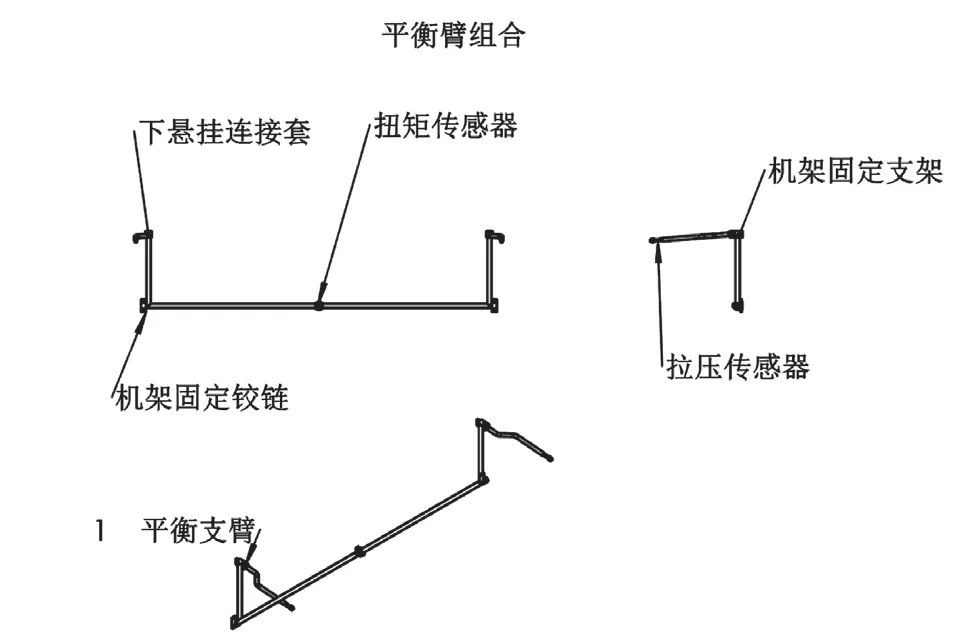
图3 平衡臂组合
5 功率计算
本机功耗主要分为3个部分,如公式(2)所示。

式中:P为本机总消耗功率;P为装载机行走功率;P为装载机清扫功率;P为除冰功率。
5.1 行走功率P行计算
分析2种工况。一是空驶45km/h,最大爬坡40度时所需功率。二是在除冰作业时,不低于作业速度2m/s(7.2km/h)时所需功率。

式中:f′— 滚动摩擦系数;W—装载机质量17100N,除冰除雪机质量1100N。总计18200N。G—重力加速度,9.8N/kg;Z—支撑轮数量4个。
代入数值可得:F= f′·W·G/Z =0.02×18200×9.8÷4=891.8N
考虑爬坡按40°计算,结果如下。
a/c=sin40°=1÷0.64=1.56×891.8=1387N
考虑恶劣天气风阻力:

式中:A—装载机迎风面积,ZL70型装载机为9m²左右;C—风阻系数,与前进速度平方成正比,该机为0.3。

作用力F=F+F=1387+341=1728N;
功率P = F·R·ω;
装载机轮直径D—1650mm,半径R—825mm;角速度ω—弧度/min。
n=N/πD=45000/3.14×2×825×60=529m/min(空驶时);n=N/πD=45000/3.14×2×825×60=83m/min(除冰作业时);P=F=1728×529/9549=95.7kW(空驶45km/h,爬40°坡时)。P=F=1728×83/9549=15kW(作业7.2km/h,爬40°坡时)。
据该分析:装载机行走功率对爬坡敏感性不大,但对提高速度敏感性强,当速度由7.2km/h提升到45km/h时,功率由15kW提升到95kW。
以岗位能力点为标准,以项目为载体的过程教学模式具有系列考核指标,学习效果评价管理网络信息化便于教师记录过程信息与考核结果,避免了传统纸质记录的不便与管理的繁琐。通过信息平台向学生实时公开过程考核情况,以使学生了解自身的学习状况,及时制定弥补措施,公开透明的评价方式也利于形成好的学习风气。
5.2 清扫功率计算
清扫辊位于除冰辊后部,所清理的碎冰已经处于悬浮状态,密度很小便于输送。P=V·h·L·γ·g·A/cos30°/60;清扫辊长L—2320mm;转数n—429r/min;夹角α—30°;直径D-800mm;前进速度V—2m/s;冰层厚h—22mm;碎冰密度γ—0.68t/m;辊梳线速度v—12m/s。
输送量计算:
P =V·h·L·γ·g·A/cos30°×60
=2×0.02×2.3×0.68×1.154×9.8×60= 42kW
5.3 除冰功率计算
除冰部件是机械核心部件,如图4所示,由双侧减速液压马达直接驱动。

图4 除冰部件
除冰刀作业时接触冰面有前倾角α、后倾角B、除冰刀宽度b,刀刃作用力F,如图5所示。

图5 除冰刀作业示意图

式中:h—除冰刀除冰厚度10mm~25mm,该设计取20mm;D— 刀具宽度150mm,15组除冰辊,工作幅宽2200mm;δ—冰抗压强度0.5MPa/cm²~2MPa/cm²,该设计取1.5MPa/cm²;f—内摩擦系数,该设计取0.12;α—前倾角35°;B—后倾角10°。
F=0.22×2×1.50×0.12×10000=792/N
转矩公式:P=FV=f(2×r×π)n/1000/60= 792×2×3.14×330×320/1000/60=8753W≈8.7kW
因此总功率为
P=P+P+P=15+42+8.7=65.7kW
6 结语
用装载机作为除冰除雪机的配套动力,设计时采用SOLIDWORKS软件对总体机构进行配置。除冰机构采用先进的外球铰链内液压马达驱动,清冰雪装置采用常规辊刷装置。除冰装置可纵向和横向仿形,除冰辊采用霍尔传感器,两侧采用拉压力传感器,平衡臂采用NS扭矩传感器,控制器采用PLC控制系统,液压系统应用液控电磁换向阀。经过优化配置该方案可行。
经过试验分析,该设计总体配置均衡;采用的工作部件技术先进,结构合理;机电液自动控制除冰装置的位置,提高了除冰效率和作业质量,减少对路面的损伤;能够满足高速公路和中小城市街道快速除冰、坡度除冰、远距离除冰作业等要求。
经SOLIDWORKS有限元分析,发现的问题主要有:平衡臂设计结构强度不足,支臂根部存在应力集中,抗疲劳强度不足等问题,应继续优化设计方案,改进材料或改进结构。
