基于多旋翼无人机的毒品原植物踏查应用研究
2022-06-20夏昊天毛兆群许鹏鹏范星亮杜俊儒刘子卓
夏昊天,段 健,毛兆群,许鹏鹏,王 帅,范星亮,杨 照,杜俊儒,刘子卓
(1. 江苏航运职业技术学院 智能制造与信息学院, 江苏 南通 226010;2. 南通市公安局 禁毒支队, 江苏 南通 226007;3. 南通飞瞰智能科技有限公司 无人机培训部, 江苏 南通 226001)
0 引言
毒品原植物踏查是禁种铲毒的日常基础工作,2016 年中国国家禁毒委员会办公室运用卫星遥感以及无人机踏查等科技手段,发现并铲除非法种植罂粟超过116 万株[1],禁种铲毒效果十分显著。通过对罂粟、大麻等毒品原植物的踏查,可以从源头上有效遏制毒品种植的违法犯罪行为。目前国内大面积非法种植毒品植物的现象已得到有效遏制,但是由于我国的领土幅员辽阔,且部分毒品原植物种植在田间沟壑、农村院落、高楼顶部等隐蔽区域,因此少数地区依然存在零星非法种植问题。采用传统的人工踏查方式往往难以覆盖此类隐蔽区域,近年来无人机技术的快速发展为毒品原植物踏查提供了另一种可行的方案。依托无人机搭载的高清摄像头,利用空中视角优势,弥补传统人工踏查中的盲区和死角。结合“航线飞行”+“手动飞行”精准高效地监测获取地面影像数据,并通过人工分析筛选排查,发现查处非法种植毒品原植物的情况[2-4]。
1 无人机踏查概述
1.1 无人机踏查优势
(1)节省成本。传统的人工踏查通过工作人员以地毯式踏查来发现毒品原植物,需要投入大量人力、物力。而无人机踏查可以预先规划设定好飞行航线,全程采用航线自主飞行,自动采集图片数据,大大减少踏查人员数量,有效降低踏查成本[5]。
(2)覆盖范围广。犯罪分子为了避免种植的毒品原植物被路人发现举报,往往将其种植在田间沟壑、农村院落、高楼顶部等隐蔽区域或者是荒无人烟的滩涂、山林,采用传统的人工踏查难以涉及此类区域[6]。而采用无人机踏查可以实现高空影像实时拍摄、多方位拍摄,同时记录周边情况,保存证据。
(3)踏查效率高。人工踏查在遇到河流、陡坡、茂密森林时需要绕路,而无人机不受地形环境限制,且空中踏查飞行速度快、视野范围大,相同时间踏查面积远大于人工踏查。另外,采用无人机踏查,可以避免恶劣地形,有效降低踏查人员的安全风险。
1.2 无人机踏查流程
(1)踏查方案制定与航线规划。首先对疑似区域进行初步的人工勘探,根据踏查面积、作业时间、禁飞限制等相关情况,选择合适的无人机机型进行空中踏查。根据测区范围、精度要求、气象条件、周边环境等因素,使用DJI Pilot 软件合理设置航线参数,如飞行器机型、挂载设备、飞行高度、航线速度、重叠率、边距等,完成飞行航线规划。
(2)飞行准备与任务执行。飞行前需完成飞行器的安装展开、结构件的固定以及传感器的检查等准备事项。为保证无人机定位的准确性,起飞前可根据软件的提示依次完成相应的动作对无人机进行指南针校准,将确定踏查方案的任务航线上传至无人机中,并设置应急操作流程,自主完成飞行航线与数据采集任务。
(3)罂粟识别。待无人机完成任务航线飞行,自动平稳降落于地面后,工作人员取出机身中的内存卡,将数据导入电脑中,根据罂粟的主要形态特征对疑似毒品原植物进行识别筛选,对于无法判断的疑似情况,可以根据采集照片的经纬度坐标确定疑似点的准确位置,并进行二次复飞,定点航摄观察,确定最终情况。
2 实际案例分析
2.1 案例描述
2021 年6 月公安机关接到热心群众举报,某区域存在疑似罂粟非法种植情况,民警现场处置后发现举报材料中的一处疑似点,始终无法确定实际位置。根据举报图片的显示,在疑似点附近的河边有一片芦苇荡。由于该区域水网密布,芦苇丛生,相似场景较多,同时缺少道路,难于行走,人工踏查工作量大,因此借助于无人机空中踏查,快速精准地搜寻该区域。根据现场环境勘探,初步选用了大疆精灵4PRO V2.0 无人机作为本次任务的执行平台,所搭载的相机参数如表1 所示。
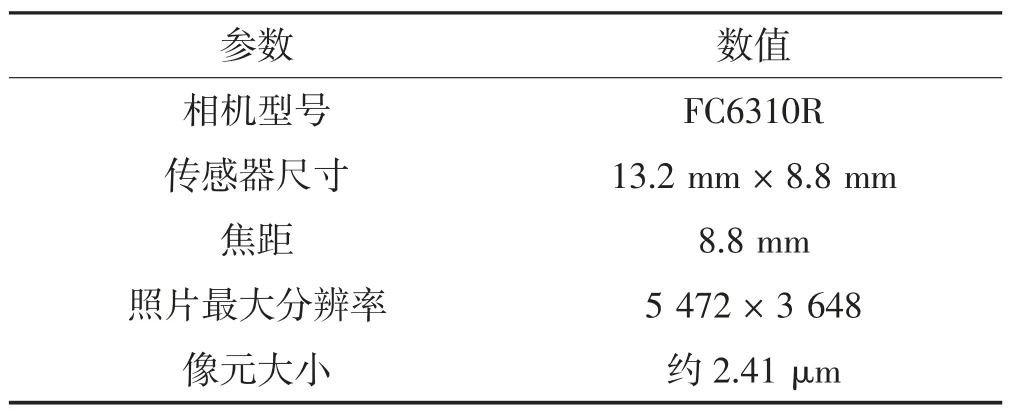
表1 大疆精灵4PRO V2.0 无人机相机参数表
2.2 航高设置
无人机飞行高度过高会导致采集图像数据的分辨率较低,无法精准快速地识别毒品原植物罂粟的非法种植情况;而无人机飞行高度过低,则会大大增加无人机自动航线飞行时长,采集的图像数据也会增多,从而使分析识别毒品原植物的工作量增大,工作效率降低,与此同时,无人机飞行高度的降低会导致飞行碰撞事故频发,造成人身财产损失。因此,选择适当的飞行高度既有利于提高数据采集的效率,又可以保证图像分辨率与飞行安全。
根据《中国植物志》32 卷,罂粟科中介绍,罂粟果实呈球形或椭圆状,直径约4 cm 至5 cm[7]。因此本文选取4 cm 作为无人机数据采集的最低地面分辨率。根据大疆官网所提供的无人机飞行高度与分辨率的关系如下方公式所示:

式中,H 表示无人机飞行高度;f 表示无人机搭载的相机焦距,具体数值见表1;a 表示无人机搭载的相机像元大小,具体数值见表1;GSD(Ground Sample Distance)表示地面采样间隔,指数字影像中用地面距离单位表示的像素大小,通常认为地面分辨率= 2*地面采样间隔。
经过上述公式计算,为保证无人机采集的数据影像能够识别罂粟果实的最高飞行高度为73.0 m。
综合考量图像识别精准度、数据采集效率、飞行安全保障、飞行时间与人力资源成本等因素,考虑周边存在的高压电塔,从工程实际出发,确定以50 m 作为本次踏查任务的飞行航高。
2.3 飞行航线规划
本次踏查对疑似区域的周边环境开展勘探调查并通过飞行观察确定初始的航线规划区域,同时结合本次毒品原植物踏查精度要求,完成规划航线相关参数的设定,具体数值如表2 所示。在大疆DJI Pilot 软件中的地图上设置毒品原植物踏查区域的边界线,并依次输入表2 中的各项规划航线参数,确认无误后,软件将自动生成无人机飞行踏查航线,如图1 所示。

表2 规划航线相关参数表
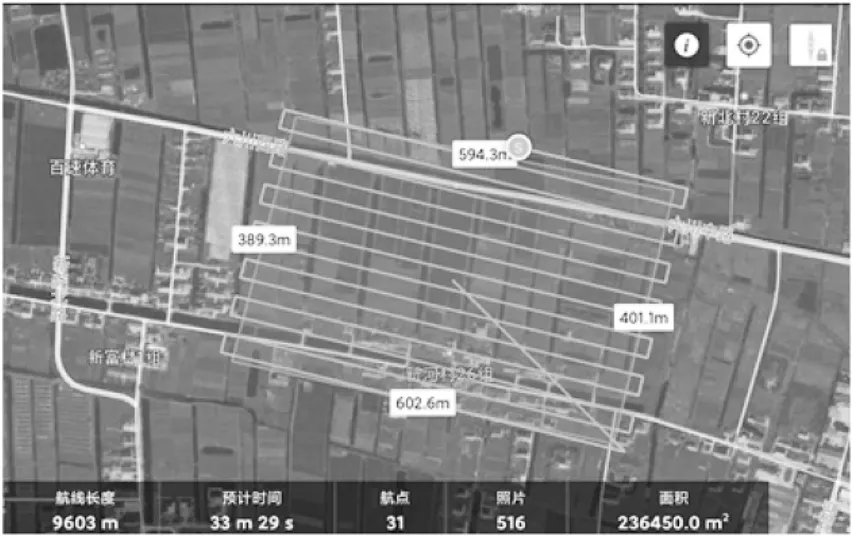
图1 无人机飞行踏查航线
2.4 图像数据筛选分析
飞行航线在50 m 高度时,共计采集图像516 张。为减少排查工作量,提高踏查工作效率,将明显不包含芦苇荡特征的图像剔除,剩余有效图像398 张。对余下的图像数据逐个排查,对照罂粟的植物形态特征,进行人工筛选分析,最终发现疑似点一处。
该处疑似区域靠近一条灌溉水渠,在水边有部分芦苇,疑似区域被一片玉米田包围在中间,根据现有的图像显示存在非法种植罂粟的可能性。但是由于外界气象环境因素的影响以及无人机所搭载的相机自身的限制,无法准确判断该疑似区域是否存在罂粟的非法种植情况。鉴于以上情况,查询疑似区域图像数据的精确经纬度信息,并进行现场二次踏查,最终排除了该疑似区域。
2.5 飞行高度分析
为了更好地探究无人机飞行高度对采集图像的分析效果、数据采集的效率等因素的影响,本文分别计算了飞行高度40 m、50 m、60 m 时的地面分辨率、预计飞行时间以及采集照片数量等参数[8],如表3 所示。

表3 飞行高度与地面分辨率对照表
通过上表数据对比可知,无人机的飞行高度越低,地面分辨率数值越小,所采集数据图像越清晰,但是无人机航线飞行所需时间越长,后期人工分析筛选排查的时间越长。
在保证飞行速度、旁向重叠率、航向重叠率等参数不变的情况下,本次踏查依次完成了40 m 以及50 m的航线飞行,并分别选取一张疑似区域的图像。通过两张不同高度下的疑似区域图像的对比,可以发现50 m飞行高度下的疑似区域存在较大不确定性,而40 m 飞行高度下,基本可以凭借经验排除疑似案例。采用40 m的飞行高度,将比50 m 飞行高度增加19.3%的飞行时间,采集图像数据的地面分辨率可以提高24.5%。在今后的毒品原植物踏查过程中,使用大疆精灵4PRO V2.0 无人机时,可以优先选用40 m 的高度作为无人机规划航线的飞行高度。但是目前国内的高压电塔高度普遍为25 m 至40 m,采用40 m 的飞行高度存在发生碰撞的可能,需要在前期的勘探过程中,确定踏查任务区域内的建筑物高度,以避免飞行高度过低导致的碰撞事故。
3 结束语
无人机踏查凭借着其覆盖范围广、踏查效率高、成本低等优势,在毒品原植物的踏查中发挥越来越重要的作用,极大地提升了公安机关的禁毒工作效率。本研究以大疆精灵4PRO V2.0 无人机为载体,分析飞行高度对地面分辨率,数据采集效率的影响,并确定以40 m 的飞行高度作为毒品原植物踏查任务的优先选择高度。随着人工智能的持续进步发展,无人机踏查毒品原植物将借助于多光谱相机,人工智能算法辅助识别等技术,自主规划航线飞行,并完成对疑似目标精准确认,有效解决人工踏查中的诸多问题,实现罂粟踏查的自动化与智能化。
