运动控制课程的实验教学改革
——从理论到实践
2022-06-15屈薇薇敬会
屈薇薇,敬会
(1. 西南科技大学 信息工程学院,四川 绵阳;2. 西南科技大学 计算机学院,四川 绵阳)
一 引言
运动控制属于电气传动控制学科范畴,以电机学(或电机与拖动)、电力电子技术、自动控制理论,微机数字控制技术等作为前期课程,是自动化和电气工程及其自动化专业的一门综合性很强的专业核心课程。主要对直流调速和交流调速的基本概念、基本组成环节、数学模型、基本控制规律及设计方法,以及单闭环、双闭环调速系统的工程设计方法进行分析与讲解[1]。通过该门课程的学习,使学生能够将专业基础知识应用于自动控制系统的建模、计算与分析;能够根据自动化系统的技术指标,选择合理化解决方案,包括系统方案、传感器的选型、执行部件的选择、控制器的选择等[2-3]。该课程重视基础,加强了对学生分析能力训练,使学生能够基于科学原理并采用科学方法对复杂自动化系统进行研究[4-5]。
然而对于运动控制的理论学习,学生往往觉得比较抽象,对书本种的参数、性能指标描述和数学模型没有形象、直观的认知,缺乏感性认识。实验课是理论教学在具体应用上的重要补充,注重实际操作技能,培养求实的科学实验素养,巩固课堂教学所学的理论知识[6-8]。然而对于传统的实验课,一方面学生会感觉内容空洞,无法将实验内容与实验目的相联系,在实验过程中只知道调整参数却不知道为何要调整该参数;另一方面由于受到学时、实验设备数量、现场实验条件等限制,使得实验过程中难以做到每个学生都动手实践,无法达到理想的教学效果。基于上述问题,我们提出的一种新的实验教学改革,通过理论学习、软件仿真和实际实验操作将理论知识、数学模型、参数调整和实际问题相联系,理论结合实际,将抽象的理论知识具象化,使学生对原本抽象的理论描述有了更直观的认识,将知识感性化来降低学习难度,进一步激发学生的学习兴趣。同时将理论知识从仿真到实验,拓展到工程应用的系统思维,培养了学生自主学习、独立思考、综合分析的能力。在本文中以单闭环直流调速系统的分析与设计为例对整个实验教学改革进行说明。
二 实验内容与任务
本实验项目通过MULTISIM和MATLAB中的Simulink分别实现PI调节器设计和从开环到单闭环的直流调速系统设计[9-11],将仿真设计结果在实际实验平台上实现[12],完成稳态调速性能指标分析[13]、系统模型建立以及MATLAB仿真、实物效果展示等工作,分析并对比开环系统机械特性和反馈系统静特性,通过具体性能指标对比描述反馈闭环控制的优越性,总结反馈控制规律。
项目需要完成的任务:
(1) 利用Multisim软件对调节器进行特性分析。
(2) 利用MATLAB中的Simulink搭建直流电机控制的开环系统模型框图,分析其调速性能指标。
(3) 分析开环系统中存在的问题,提出解决方法。
(4) 利用MATLAB中的Simulink搭建直流电机控制的闭环系统模型框图,分别使用比例放大器和比例积分调节器作为控制器,分析其调速性能指标。
(5) 在实验平台上搭建开环系统并测定其外特性。
(6) 在实验平台上搭建闭环系统,分别使用比例放大器和比例积分调节器作为控制器,观察并记录实验数据。
(7) 调节直流发电机负载,测定实验数据并绘制系统静态特性曲线。
(8) 根据实验实测数据,绘制并比较开环系统机械特性和单闭环直流调速系统的静特性,利用所学理论知识对比较结果进行解释。
(9) 提高部分:在转速单闭环的基础上设计并实现电流单闭环、电压单闭环直流调速系统,分析这两个闭环系统的机械特性,总结反馈控制规律。
三 教学设计与实施进程
本实验的过程是一个具有实践性的创新型工程试验,通过本实验可以使学生学会从工程思维角度解决问题,实验设计构思如图1所示。

图1 实验设计构思路
(一) 提出问题
通过工程实际问题分析讨论实验原理:某龙门刨床工作台拖动采用直流电动机,其额定数据如下:60kW、220V、305A、1000r/min, 采 用 V-M系统,主电路总电阻R=0.18Ω,电动机电动势系数Ce=0.2V·min/r。如果要求调速范围D=20,静差率s<=5%,采用开环调速能否满足?若要满足这个要求,系统的额定速降最多能有多少?[14]
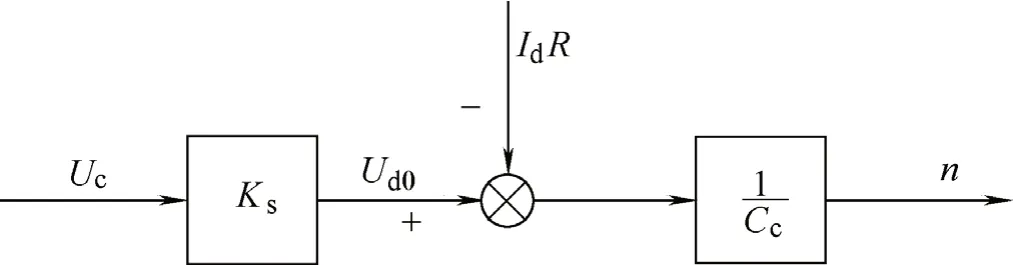
图2 开环调速系统的稳态结构图
通过理论计算分析可知,开环调速系统的额定速降是275 r/min,而生产工艺的要求却只有2.63r/min,相差几乎百倍!开环调速已不能满足要求,那么如何解决这个问题?
(二) 分析问题
当电流连续时,V-M系统的额定速降为

开环系统机械特性连续段在额定转速时的静差率为

如果要求D = 20,s ≤ 5%,则

由此可知,开环调速系统的额定速降是275 r/min,而生产工艺的要求却只有2.63r/min,相差几乎百倍!开环调速已不能满足要求,需采用反馈控制的闭环调速系统来解决这个问题。
(三) 解决问题
这里引入负反馈概念,引导学生回忆自控原理中的“检测误差,用以纠正误差”,将上一节中的输出量通过反馈传递到系统输入端,构成一个闭合的环路,由于被调节量是转速,因此构成的单闭环直流调速系统是转速反馈控制,其稳态结构框图如图3所示。通过比较开环系统的机械特性和闭环系统的静特性可知,闭环系统比开环系统的稳态特性硬得多,为了在一定静差率的条件下提供调速范围,须设置电压放大器和转速检测与反馈装置。
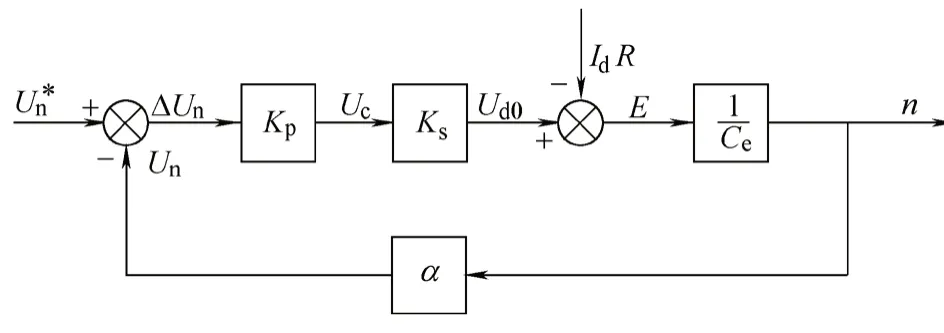
图3 单闭环直流调速系统(转速负反馈)稳态结构框图
(四) 具体实现
具体实现主要分为Multisim仿真分析、MATLAB仿真分析、实物操作三部分,如图4所示,各流程分别举例如下:
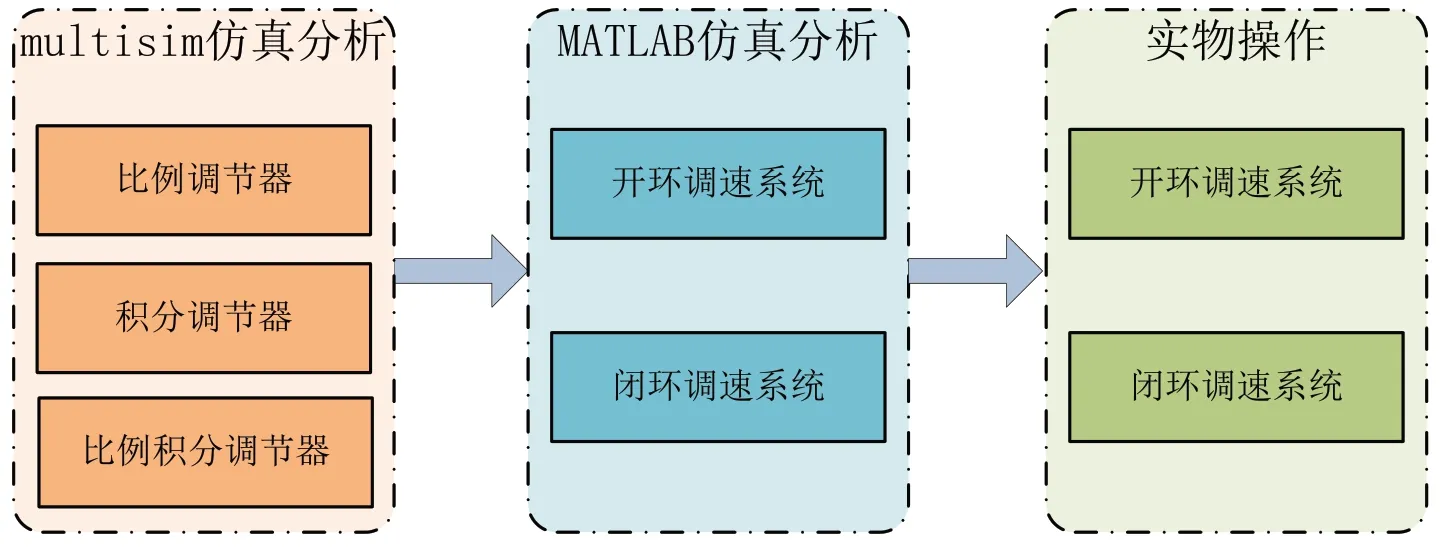
图4 具体实现
(1) 控制器 Multisim仿真实验
利用Multisim软件对比例、积分以及比例积分调节器分别进行仿真,如图5所示。要求学生在此基础上完成积分调节器和比例积分调节器的仿真电路并分析仿真结果。

图5 积分电路及仿真结果
(2) MATLAB仿真分析
直流电动机的参数如表1所示。仿真过程如图6所示[15],在每一步仿真过程中由学生动手搭建仿真模型,对仿真结果进行分析,提出所存在的问题,并给出下一步解决方案,以实现从开环调速到有静差闭环调速到无静差闭环调速的过程。同时在整个分析过程中结合上一步MULTISIM中的仿真回忆巩固实现无静差调速所需的调节器结构及参数条件。

表1 直流电机参数
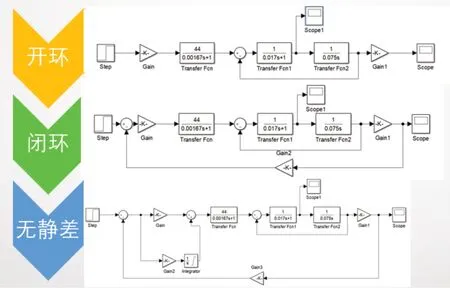
图6 Matlab仿真过程
(3) 实物操作
根据原理图在装置上进行连线,完成基本单元的调试、电动机的开环特性测定以及转速负反馈单闭环直流调速系统特性测定。
在完成调试基本单元部件,对调节器进行调零、调整正负限幅值、整定反馈系数等工作后,设定给定电压为负给定,转速反馈电压为正电压,将图7中的“调节器I”依次接成(1)比例(P)调节器和(2)PI(比例积分)调节器,分别对应Matlab仿真中的闭环和无静差。首先直流发电机轻载,从零开始逐渐增大给定电压Ug,使电动机转速接近n=1000rpm。由小到大调节负载电阻R,测定相应的Id和n,直至最大允许电流。根据实验数据,画出转速负反馈单闭环直流调速系统的机械特性曲线n =f(Id),并分析将“调节器I”设置为P调节器和PI调节器时调速系统特性的不同及原因。

图7 单闭环直流调速原理图
(五) 教学实施过程
本实验项目包含自学预习、实验操作、总结报告三个阶段,要求学生独立完成,所设计的单闭环直流调速系统能正确运行,具体过程如表2所示:
四 考核内容与方式
成绩构成由三部分组成:预习、实验和报告,评分标准如表3所示。
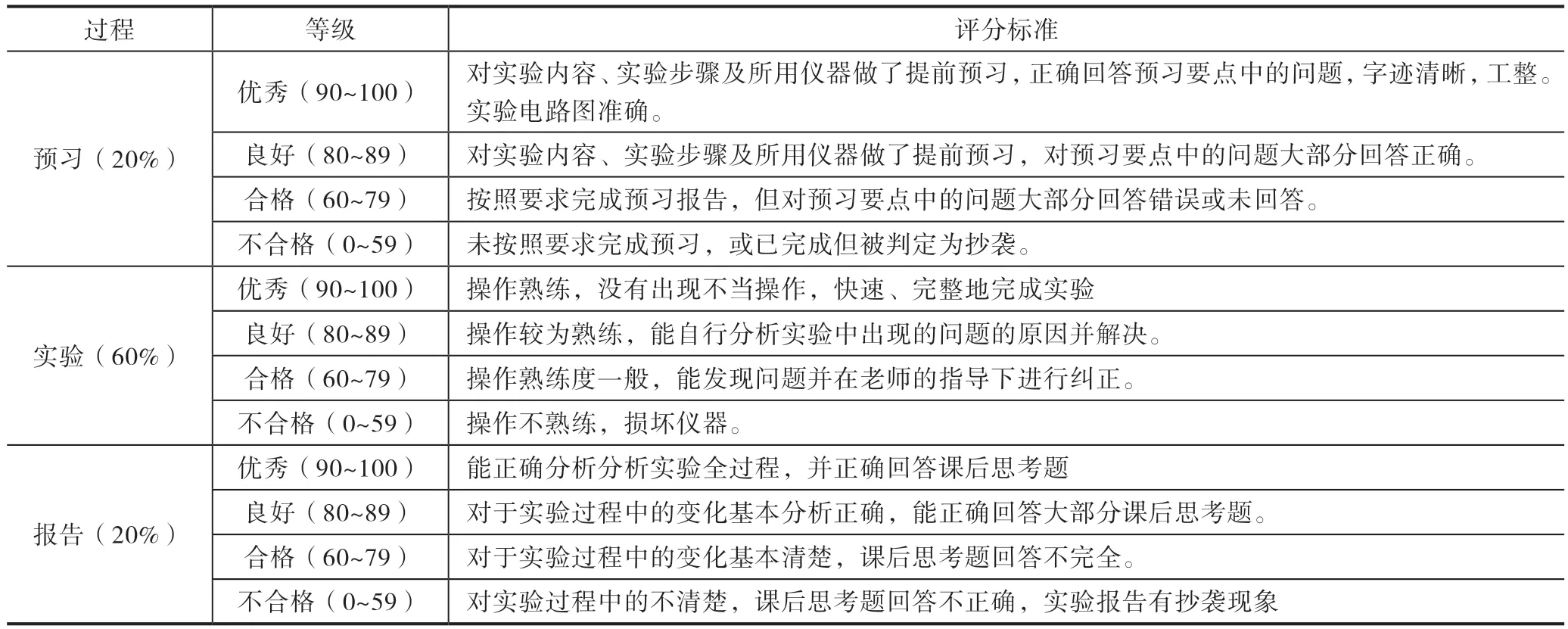
表3 考核内容及标准
五 结语
本文主要介绍了将理论、仿真和实操相结合的新的运动控制实验教学思路,并以单闭环直流调速系统为例说明了该思路的实际实现过程。该实验是运用反馈控制原理结合实际控制系统研究的综合性案例,需要学生全面掌握单闭环控制回路的基本控制规律、直流电机调速的基本工作原理及其数学模型,能借助软件仿真加深对器件和系统模型的理解,在实验装置上选择合适的器件搭建系统并进行调试,能够帮助学生结合工程实际由浅入深地理解反馈闭环控制的优越性,总结反馈控制规律。新的实验教学方法从实际出发,以解决问题为导向,将抽象的理论知识具象化,激发学生的学习兴趣。通过仿真与实物相结合进行知识延展,学生需要举一反三,通过对已有方案进行分析、提出问题并思考新的方案解决问题,对知识能够活学活用。整个教学过程将理论知识有效地应用到具体实践上,提升学生的知识应用能力,充分调用学生的学习积极性和能动性,培养其自主学习、独立思考、综合分析的能力。
