基于无人机影像的施工场所三维建模方法
2022-06-15袁子洋曲春燕刘春朝田从丰
袁子洋,曲春燕,刘春朝,田从丰,闫 伟
(1.山东大学能源与动力工程学院,山东 济南 250011;2.山推工程机械股份有限公司,山东 济宁 272073)
传统土建工程的施工方案中,工程机械协同配合、路径规划及土石方调配等问题存在较大可优化的空间。为形成更科学准确的施工策略,生成施工场所的三维地图是首先要解决的问题。采用无人机摄影经处理生成三维模型,可以出色完成对施工场所的测绘工作,适用于各种恶劣地貌,可以生成高精度三维地图,提高测绘工作效率,精简施工流程,为智能一体化施工作业方案的形成提供模型基础,已逐渐成为完成土建行业测绘工作的趋势。该技术在优化施工过程的测绘水平的同时,还较大程度地节约了人力物力,与传统测绘方法相比优势明显。
在智能化信息化的趋势下,多名学者在该领域做了大量相关研究。李朋伟等利用无人机三维建模技术进行了矿山地区的环境调查评价[1];刘颖等利用无人机实景建模完成对道路路基平整度的检测[2];马随阳等对比了无人机摄影与地面激光扫描两种三维建模方式在桥梁建模上的不同,对航道测绘技术提出建议[3];王植等利用无人机影像进行了矿山地区的三维建模,提出了一种矿区生产的可视化管理方法[4];叶盛智等分析了无人机倾斜摄影实景三维建模方法在深基坑施工任务中的应用,利用实景建模完成了土方工程量快速计算、土方开挖定位放线及开挖进度监测等施工流程[5];杨莎莎等通过无人机构建数字三维模型进行了对坝基稳定性的测量评价,为坝基岩体施工方案的决策提供了指导建议[6]。
本文通过无人机在施工场所实地摄影,分析了无人机影像处理过程中特征点提取的理论基础,并利用AgisoftPhotoScan 生成了施工场所的三维模型,并对三维实景建模成果进行了误差校验,得出了符合误差范围的施工场所三维模型。
1 无人机航摄流程
为生成符合误差标准的三维实景模型,首先要用无人机拍摄相应场地。流程大致为前期准备、确定航摄方案、规划飞行任务、无人机飞行测绘等4 个环节。
前期准备主要为收集测区资料,包括确定测区经纬度坐标范围,了解测区地貌特征,确定测绘人员及所需设备。本次实验设备采用大疆精灵4RTK 小型无人机。其RTK(Real-Time Kinematic)模块实时动态效果好,可以实时进行地理位置解算,相比卫星定位误差更小,能保证飞行作业的准确性及安全返航的要求。无人机佩带的相机为2 048 万像素,航片分辨率为4864×3648(4∶3),其航摄照片可以满足构建施工场所三维模型的需求。
完成准备工作后,到达测区需要根据现场情况确定航摄方案,为保证航摄效果,建议在晴天完成测绘任务。本次无人机航摄目的为生成三维模型,航拍方式应选择五向航拍,无人机会在测区形成五组不同航线,五组航线俯仰角各不相同,保证可以从多个不同视角进行航拍,确保测区特征的提取程度满足要求。根据测区最高海拔确定无人机航摄高度,观察测区周围建筑物高度以确定返航高度。为保证测区的全覆盖拍摄,相片重叠度的设置至关重要。相片重叠度参数主要包括纵向重叠度、横向重叠度、航线弯曲度及航片旋角,测区地形起伏大应设置较高的重叠度以避免漏拍测区特征。除了上述参数确定,航摄方案还包括飞行区域、飞行速度、坐标系、拍摄间隔等参数的确定。
确定航摄方案后,在无人机遥控器上完成飞行任务的规划,进行航摄测绘,得到测区航片。
2 影像匹配
2.1 影像匹配原理
本文中无人机飞行方式为五向航拍,影像匹配技术就是在不同角度但包含相同区域的航片寻找同名特征的过程,影像匹配是最基本的图像处理步骤,直接影响了生成的三维模型的精度[7]。影像的特征包括几何特征、颜色特征及纹理特征等,确定特征在航片中的位置并将其数字化表示,以相似性度量方法判断是否为同名特征并实现匹配,经影像空间变换模型的求解计算,得出影像间的几何变换关系。
2.2 SIFT算法说明
影像匹配技术即提取同名像点,点特征提取相比线特征提取及区域特征提取,算法更简单,便于理解,因而成为了主流特征提取方式。最常用的点特征提取方式为尺度不变量特征变换,即SIFT(Scale-Invariant-Feature-Transform)匹配算法[8]。
SIFT 算法的主要特点如下:①特征检测稳定性好,图像的旋转、平移、缩放等变化对匹配效果无影响,对视角变换、图像噪声也有较好的鲁棒性;②能在多个维度提取特征信息,可以有效处理复杂图像的特征匹配;③算法结构相对复杂,进行影像匹配的计算量较大;④该算法进行特征点定向取决于影像局部范围像素的梯度方向,复杂图像可能出现特征点主方向不准确的情况,从而对匹配效果造成不利影响[9]。
2.3 SURF算法说明
SURF(Speeded Up Robust Features)算法是一种快速鲁棒特征检测算法,以SIFT 算法为基础进行了大量改进,有效提高了影像匹配的计算速度[10]。
SURF 算法主要特点如下:①在构建尺度空间的过程中,SURF 算法相比SIFT 算法不需要对影像进行降采样处理,以改变盒子滤波器的大小来构建尺度空间;②尺度空间的构建过程与影像大小及复杂程度无关,相比SIFT 算法显著提高了运算速度;③具有SIFT 算法稳定性好、鲁棒性强的优势,图像的旋转、尺度、缩放等变化对匹配效果无影响,对图像噪声及亮度变化也有一定的鲁棒性,可以有效忽略不同航摄视角带来的图像地物信息以外的图像参数变化对影像匹配效果的不利影响。
3 三维实景建模及成果校验
3.1 三维实景建模流程
本文采用AgisoftPhotoScan 软件对无人机采集的航片进行三维实景建模,具体流程如图1所示[11]。
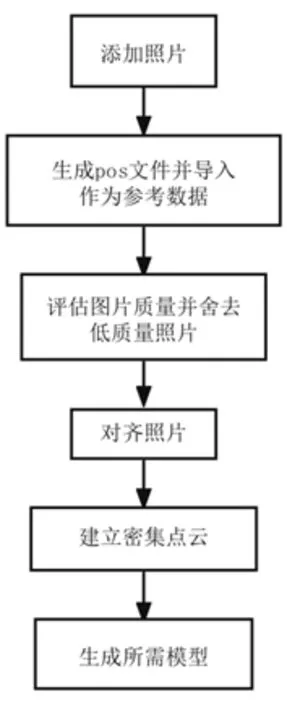
图1 三维实景建模流程
首先导入pos 文件作为照片的参考数据,pos文件中包含经纬度、高度等生成三维模型必要的信息,其经纬度、高度信息也符合实地航拍的任务规划情况,部分pos 数据如图2 所示。

图2 部分pos数据
对齐照片是将航片的数据信息进行排列,还原每张照片拍摄时相机的位置进行定位,根据定位情况将航片依次排列,生成稀疏点云模型。根据稀疏点云模型计算特征点和连接点之间关系,基于计算结果生成密集点云模型。密集点云模型如图3 所示。
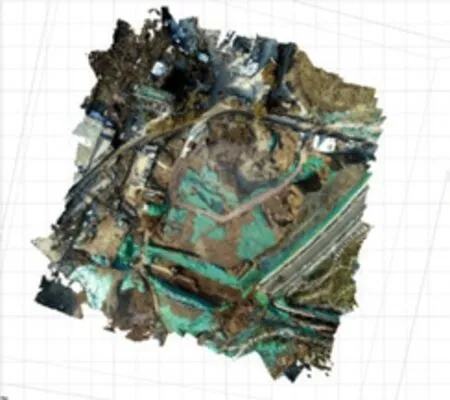
图3 密集点云模型
生成密集点云后,可以根据实际需求生成所需模型,如瓦片模型或DEM 模型等。本文生成的瓦片模型及DEM 模型如图4 所示。
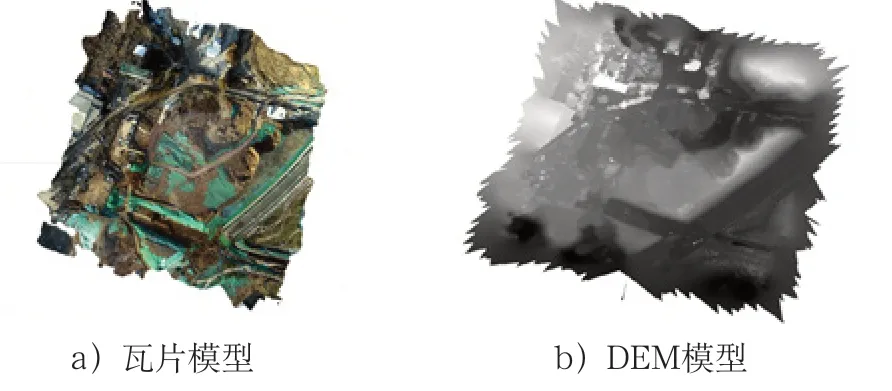
图4 数字模型
3.2 三维实景建模成果校验
对得到的三维实景模型进行结果矫正,包括重叠度的校验及相机位置的误差矫正,如图5 所示。由图5(a)可知,测区位置被照片覆盖的数目基本达到9 张或9 张以上,对需要进一步处理的中间区域能充分提取其数据信息。由图5(b)所示,相机的位置误差在±3.5cm 的区间内,误差较低,满足精度需求。相机在X、Y及Z3 个方向即经纬度及高度方向的误差如表1 所示,总误差为4.40011cm,定位效果出色。

图5 三维建模结果矫正

表1 平均相机位置误差(单位:cm)
本文生成的三维模型的像素矫正数据集内部参数相关数据分别如表2 及表3 所示。由表2 可以看出投影误差为0.534pix,误差较小。表3 是相机校准系数和内参相关矩阵,其中F为焦距,Cx、Cy为光心位置,K1、K2、K3为径向畸变系数,P1、P2为切向畸变系数。表3 内的相关参数也满足精度需求,建模效果出色。

表2 相机像素矫正数据

表3 相机校准系数和内参相关矩阵
4 结论
本文构建了一种基于无人机摄像的施工场所三维建模方法,分析了从二维航片生成三维实景模型的影像匹配理论,提出了无人机航摄流程及三维实景建模流程,得出的三维模型符合误差校验,精度较高。该建模方法节省了人力物力,精简了决策流程,能有效为施工方案提供建议,有利于工程机械智能一体化施工作业。
