高压隔离开关非侵入式机械缺陷诊断方法及现场应用
2022-06-15杨涛徐吉用朱启龙王永志刘佳立
杨涛 徐吉用 朱启龙 王永志 刘佳立


摘要:高压隔离开关是电力系统中用量最多的一次设备,其缺陷率随着运行年限增长逐年增加。现阐述了一种高压隔离开关电机功率非侵入式检测方法,在不改变隔离开关完整结构的情况下,检测操作机构箱电机的电流、电压信号,然后根据驱动电机的动作时间以及持续计算的电机功率信号建立功率曲线,通过将该功率曲线与机械状态正常时的功率曲线进行对比,判斷隔离开关是否存在机械缺陷,并进行现场实际验证。
关键词:高压隔离开关;非侵入式;功率曲线;机械缺陷
中图分类号:TM564.1 文献标志码:A 文章编号:1671-0797(2022)11-0001-05
DOI:10.19514/j.cnki.cn32-1628/tm.2022.11.001
0 引言
高压隔离开关是电力系统中用量最多的高压设备,主要用于隔离电源、倒闸操作、连通和切断小电流回路等,是电网可靠运行必不可少的一种电力设备。由于敞开式高压隔离开关户外工作环境较为恶劣,常年经受风霜、雨雪、沙尘、污秽等的侵蚀,加之其结构较为简单、造价相对便宜,部分隔离开关的设计缺陷、选材不当、日常运维质量不佳等因素,致使隔离开关缺陷频发[1-5]。当隔离开关存在机械故障时,其可能无法正常分合闸,同时触头、触指啮合状态不良将导致隔离开关发热的缺陷,严重危害电网安全稳定运行。
针对高压隔离开关机械缺陷的检测诊断,目前国内外的研究主要有:
(1)通过加强日常运行维护来预防高压隔离开关机械故障[6-7];
(2)通过改变敞开式高压隔离开关原有轴系,断开操作杆,在断开的操作杆之间安装力矩传感器、角度传感器来判断隔离开关的机械状态[8];
(3)根据操作力矩与应变之间的关系,通过检测敞开式隔离开关动作过程中操作杆的应变来判断隔离开关的机械状态[9];
(4)通过检测敞开式高压隔离开关动作时操作机构箱的电机电流来判断隔离开关的机械状态[10-11];
(5)采用隔离开关操作力矩—转角检测设备,离线检测敞开式高压隔离开关动作过程的操作力矩—转角曲线,然后将检测曲线和标准曲线或运行状态良好的历史曲线进行比较分析,来判断被测隔离开关的机械状态[12]。
以上技术均需在停电后进行检测,且需在严格的实验室条件下才能开展,而对隔离开关的带电检测及诊断技术研究较少。下文将介绍一种高压隔离开关驱动电机功率非侵入式检测方法,能在不破坏隔离开关完整结构的情况下,实现对隔离开关机械状态的在线检测及诊断。
1 高压隔离开关驱动电机功率非侵入式检测方法
1.1 检测技术原理
高压隔离开关一般由合、分闸接触器控制三相异步电机正、反向转动,从而完成其合、分闸运动。目前可以实现通过检测高压隔离开关驱动电机功率来诊断其机械状态。
交流电路中,有功功率是指一个周期内负载消耗的功率的平均值,也称平均功率,计算公式如下:
异步电机是典型的三相对称负载,采用二表法测量电机三相功率,通过测量两相电流以及对应的线电压,可以计算电机的输入功率,计算公式如下:
所以在检测工作中,一般需要在电机回路并接电压传感器,同时串接电流互感器,测量电机动作过程中的电机电压信号与电流信号,从而计算其功率信号。在得到电机功率信号后,需通过接收系统传输至后台计算机处理系统,计算机根据检测数据持续计算电机功率信号,根据驱动电机的动作时间以及持续计算的电机功率信号建立功率曲线,将该功率曲线与机械状态正常时的功率曲线进行对比,即可判断待检测高压隔离开关的机械状态是否正常。
1.2 电机功率非侵入式检测方法
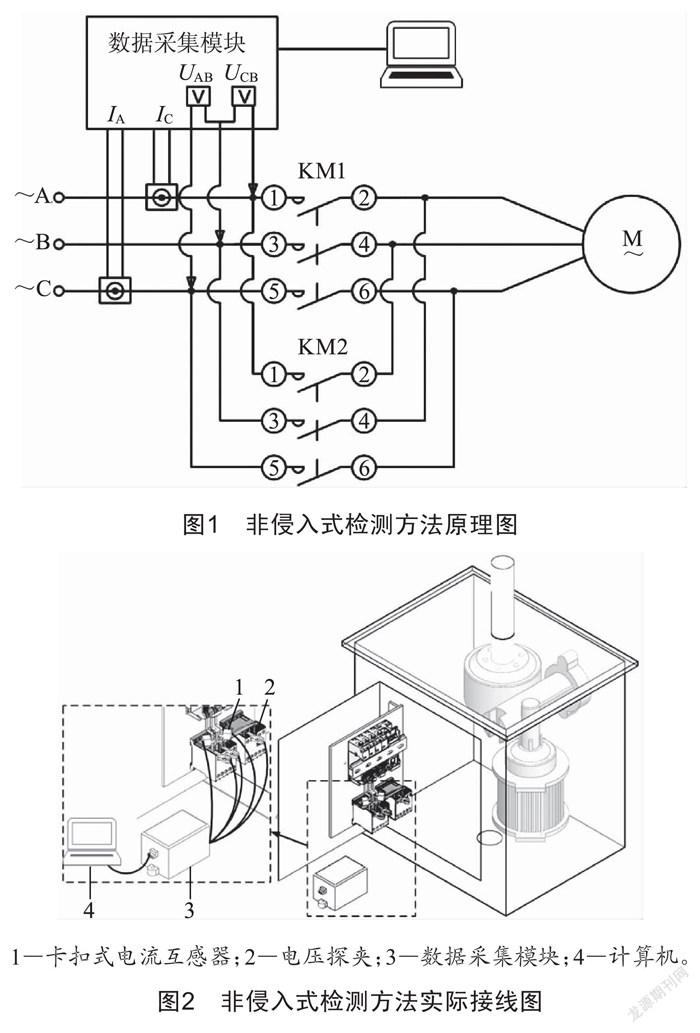
根据上述原理分析,提出了一种驱动电机功率非侵入式检测方法。采用卡扣式电流互感器配合数据采集模块直接测量相电流,将卡扣式电流互感器安装在接触器A、C两相的进线端,从而引出相应的电流信号,通过数据采集模块测量接触器A、C两相相电流IA和IC。采用电压探夹配合数据采集模块测量接触器A、C两相电压,将电压探夹夹持在接触器的端子处,通过电压探夹金属部分与端子螺丝接触,从而引出相应的电压信号,通过数据采集模块测量接触器A、C两相电压UAB和UCB,如图1、图2所示。
现场检测时,在确保计算机、数据采集模块、电压探夹和卡扣式电流互感器之间连接好后,开始持续检测接触器的电流、电压信号,得到驱动电机的电流、电压信号。当驱动电机动作时,检测到的接触器A、C两相电流值大于0.1 A,数据采集模块开始记录并存储相关检测数据,计算机则根据检测数据持续计算电机功率信号,并根据驱动电机的动作时间以及持续计算的电机功率信号建立功率曲线。由人工将该功率曲线与机械状态正常时的功率曲线进行对比,即可判断机械状态是否正常。
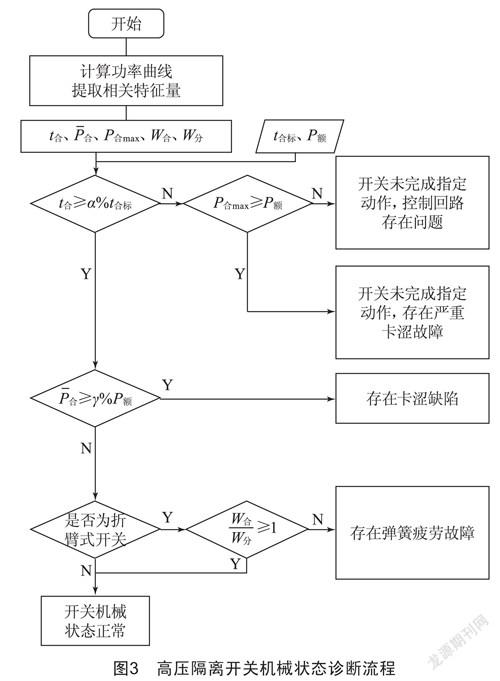
在上述技术方案的基础上,为进一步实现计算机自动判断机械状态,可在计算机上编写程序,使计算机基于功率曲线以及相关特征量,自动对高压隔离开关进行机械状态诊断。高压隔离开关机械状态诊断流程如图3所示。
首先,在测得待检测隔离开关的电机功率曲线后,提取相关特征量,包含其合闸时间t合、合闸过程平均输出功率P合、合闸过程最大输出功率P合max、正常状态合闸时间t合标、电机额定功率P额。对于折臂式隔离开关,还需计算其合、分闸过程做功之比(W合/W分)。
然后,计算机开始比较被测隔离开关t合和t合标,当运动时间t合低于标准时间t合标的α%时(α的设定应结合不同型号开关所配合的操作机构箱具体设定,具体原则应为当运动时间低于标准时间的α%时,隔离开关的回路电阻为标准值的3倍以上),其转角不在允许范围内,说明存在动作不到位故障。
该故障原因有两种:其一是开关未完成指定动作,控制回路存在问题;其二是开关未完成指定动作,存在严重卡涩故障。因此,计算机还需将测得的功率最大值P合max与电机额定功率P额进行对比,若测得P合max≥P额,则为开关存在严重卡涩故障;若测得P合max
被测隔离开关若不存在上述故障问题,则计算机继续比较被测隔离开关的合闸过程平均输出功率P合和电机额定功率P额,当被测隔离开关合闸过程P合超出P额的γ%(γ的数值应根据不同高压隔离开关型号决定)时,判定存在卡涩缺陷。
最后,若被检测高压隔离开关不存在上述任一故障和缺陷,则判断待检测隔离开关机械状态正常。
此外,若被检测高压隔离开关是折臂式隔离开关,由于折臂式开关设有平衡弹簧,以平衡动作过程中导电臂重力势能的变化。一般情况下,应保证处于分闸状态的隔离开关不能自动合闸,因此合闸过程所需的驱动力较大,电机功率较大,合闸做功应大于分闸做功。因此,除上述故障和缺陷诊断外,计算机还需根据其合、分闸过程做功之比(W合/W分)进行判断,若测得(W合/W分)≥1,则说明平衡弹簧状态正常;若测得(W合/W分)<1,则说明开关平衡弹簧已经疲劳。
2 应用情况
2.1 某GW36-550型隔离开关试验情况
对某GW36-550型隔离开关采用此非侵入式方法进行检测,通过模拟现场故障,采集了不同机械状态的功率曲线。不同机械状态下的曲线存在明显区别,结合各机械状态功率曲线的特征量验证该检测方法及诊断流程的准确性。
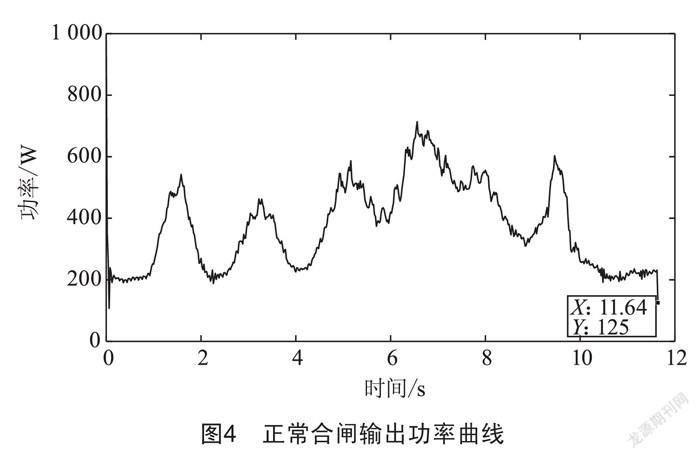
正常机械状态下,合闸输出功率曲线如图4所示。提取对应状态量,该隔离开关合闸过程运动11.64 s,合闸过程平均输出功率為375 W,合、分闸做功之比为1.57。
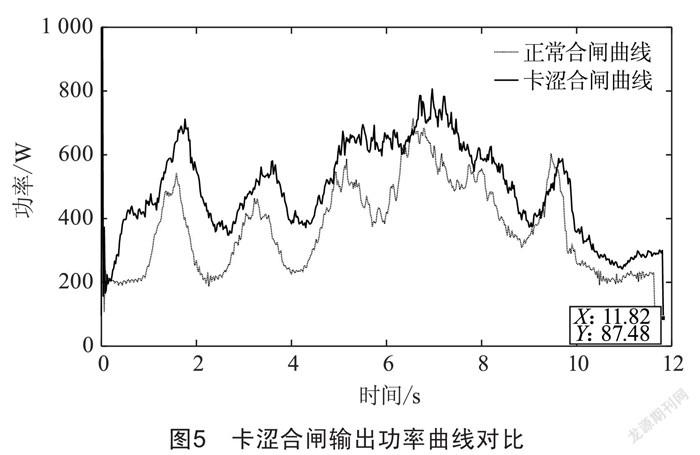
人为模拟隔离开关合闸过程中发生传动部分卡涩的情况,得出卡涩状态下与正常状态下的曲线对比,如图5所示。卡涩状态下合闸过程运动11.82 s,合闸过程平均输出功率为490 W,比正常状态增加115 W,合、分闸做功之比为1.62,合、分闸做功之比基本不变。
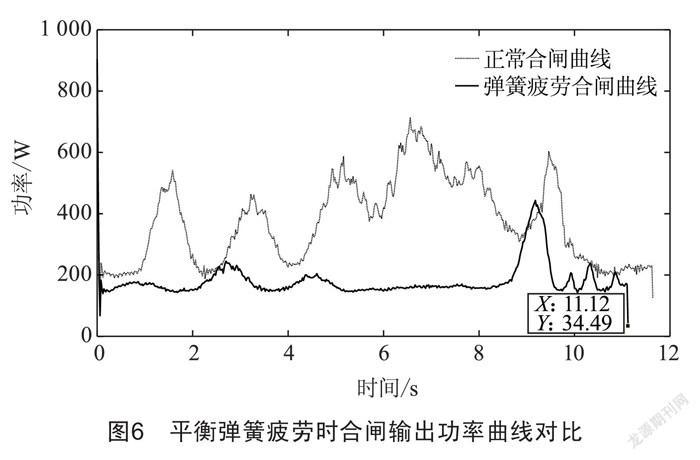
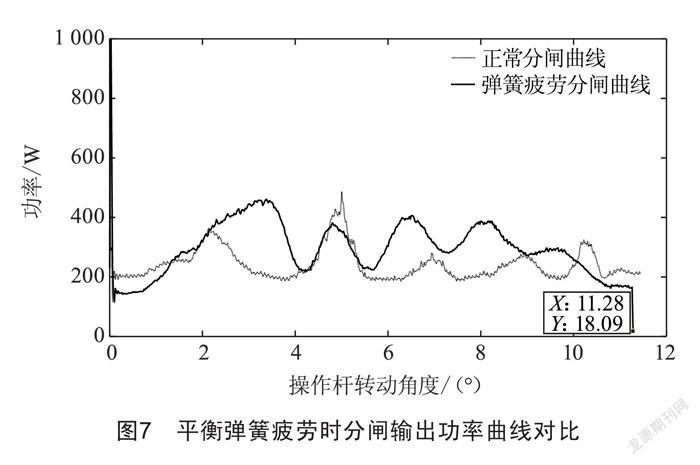
将疲劳的平衡弹簧进行更换后,得出平衡弹簧疲劳状态下与正常状态下的曲线对比,合闸曲线如图6所示,分闸曲线如图7所示。弹簧疲劳状态下的合闸过程运动11.12 s,合闸过程平均输出功率为189 W,分闸过程平均输出功率为297 W,合、分闸做功之比为0.6,小于1。
2.2 某GW7C-252型隔离开关现场检测实例
运用此检测方法及装置对某500 kV新建变电站220 kV隔离开关开展验收,对某GW7C-252型隔离开关检测时发现电机功率曲线异常波动,结合该隔离开关工作原理及曲线波动情况,确定了曲线异常的原因,情况如下所述:
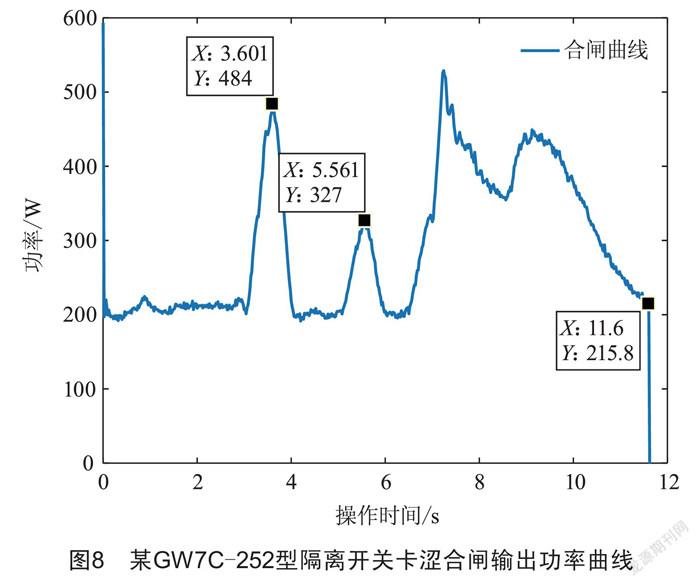
该型号隔离开关在触头、触指啮合前,导电臂基本匀速水平旋转,驱动电机仅需克服摩擦阻力运动,功率较小且平稳。触头、触指啮合过程中,触头先逐渐与触指接触,电机功率迅速增大,整个啮合过程,翻转机构内的弹簧先被拉伸,然后逐渐释放,但触头、触指夹紧力逐渐增大,因此啮合阶段力矩存在多个形状不同的波峰。
该隔离开关在3.6 s、5.6 s时曲线存在明显的波动,如图8所示。
结合上文判据,初步判断导电臂水平旋转过程中存在异常卡涩情况。结合故障点发生的时间对隔离开关传动部分进行检查,发现3.6 s时由于主旋转绝缘子底座拉杆固定螺栓下端与地刀异常接触,存在卡涩情况,如图9所示。5.6 s时发现由于导电臂水平旋转过程中,主旋转绝缘子底座闭锁盘与地刀闭锁轴承接触过于紧密,造成异常卡涩,如图10所示。
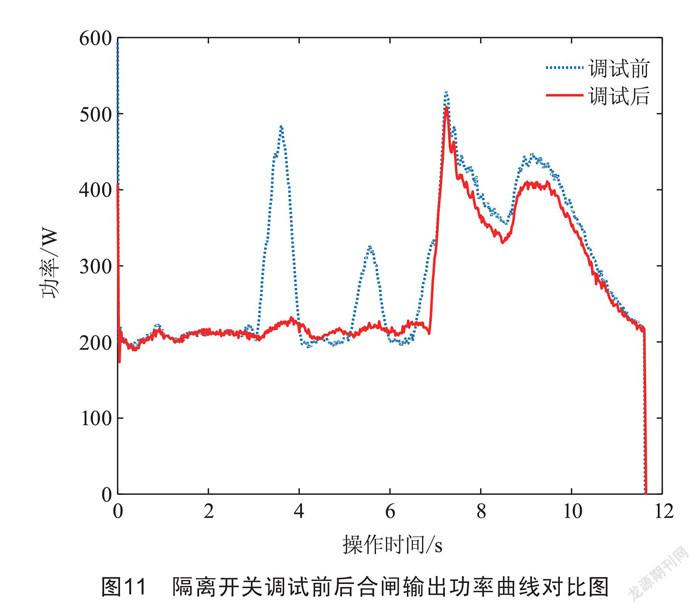
对以上异常卡涩点进行处理后,电机输出功率曲线恢复正常,如图11所示。对该站同类型隔离开关检测结果显示,大部分隔离开关均存在以上问题,均为安装工艺不良造成。
3 结语
经现场试验论证,本文介绍的高压隔离开关驱动电机功率非侵入式检测方法,能在不破坏隔离开关完整结构的情况下,通过提取高压隔离开关分、合闸过程中的驱动电机功率信号,然后提取能有效表征机械缺陷的特征量,形成隔离开关分、合闸状态输出功率曲线,通过与正常功率曲线对比,再结合不同型号隔离开关机械缺陷的不同判据,可以实现隔离开关机械缺陷的带电检测及诊断。
该方法通过曲线对比可大致判断隔离开关传动部分卡涩、平衡弹簧疲劳两类典型故障,但是要准确定位高压隔离开关机械故障部位、判别故障程度还需进行更深入的研究。
[参考文献]
[1] 盛明学,王志清.户外高压隔离开关常见故障的原因分析与处理[J].高压电器,2010,46(10):93-96.
[2] 崔景春,王承玉,张猛,等.高压交流隔离开关和接地开关[M].北京:中国电力出版社,2016.
[3] 张涛.高压隔离开关安装与检修[M].北京:中国电力出版社,2012.
[4] 国家电网公司人力资源部.变电检修(上)(下)[M].北京:中国电力出版社,2010.
[5] 肖荣,徐澄.220 kV GW6型隔离开关导电回路过热故障分析及处理[J].高压电器,2013,49(1):107-110.
[6] 钟振蛟.户外隔离开关机械故障的起因及预防[J].高压电器,2006,42(6):464-467.
[7] 李颐.GW4-110型和GW4-220型隔离开关机构卡涩的处理[J].高压电器,2002,38(2):64.
[8] 常林晶,徐光辉,乔岩泽,等.GW4型隔离开关分合闸操作力矩的分析与计算[J].高压电器,2013,49(11):127-132.
[9] 张晓强.应变式高准确度动态扭矩测量仪的研制[D].哈尔滨:哈尔滨理工大学,2003.
[10] 黄聿琛,阮江军,邱志斌,等.隔离开关操动机构电机输出轴扭矩和电流关系的研究[J].高压电器,2015,51(6):139-144.
[11] 邱志斌,阮江军,黄道春,等.基于电机电流检测的高压隔离开关机械故障诊断[J].中国电机工程学报,2015,35(13):3459-3466.
[12] 马宏明,周涛涛,彭诗怡,等.基于操作杆转角信号的隔离开关机械故障诊断技术研究[J].高压电器,2018,54(8):33-39.
收稿日期:2022-03-28
作者简介:杨涛(1989—),男,云南嵩明人,工程师,主要从事变电检修工作。
徐吉用(1989—),男,云南宣威人,工程师,主要从事继电保护、科技创新管理工作。
朱启龙(1988—),男,云南宣威人,高级工程师,主要从事高压试验工作。
