独立微网变换器的自适应参数虚拟同步机控制策略研究
2022-06-14钟建伟陈若奇张继学张哲恺
钟建伟,陈若奇,黄 明,张继学,鄢 蓓,张哲恺
(1.湖北民族大学,湖北 恩施 445000;2.国网湖北省电力有限公司恩施供电公司,湖北 恩施 445000)
0 引 言
随着全球能源使用问题和世界环境生态问题的出现,分布式新能源如光伏发电和风电等凭借着它们的清洁性和可再生性,在电力系统中的应用比例逐步增大。但新能源发电有出力不稳定的缺点,为了解决这个问题,各国学者提出了微电网的概念,微电网就是将分布式新能源发电、负荷、储能系统、变流器组成的小型发配电系统。由于光伏发电的发展和直流负荷的增加,直流微电网与交流微电网形成的交直流混合微电网的应用日益增多,这给现存的交流供电系统带来了供电支撑,同时提高了整个系统的稳定性和经济性。
在交直流母线之间起连接作用的电力电子变流器,由于其自身的器件特性,并不像同步发电机一样具有惯性调频能力和阻尼特性来平抑功率震荡,在负荷突变或故障发生时调节能力比较弱,频率波动较大,对于整个系统的稳定影响较大。为了使变流器拥有惯性与阻尼,文献[6]提出了虚拟同步机技术来控制交直流电网之间的变流器,它的关键思想就是模拟传统的同步发电机的转子运动方程使变流器拥有惯性,从而使得频率变化有一定的过渡时间,减小其变化的超调量。文献[7-8]通过小信号模型建模,运用根轨迹法对虚拟同步机控制方法中的关键参数对于系统稳定性的影响进行了分析,对本文的参数选取提供了指导。文献[9-10]提出了转动惯量和阻尼系数的自适应控制,来优化频率的变化曲线,但是控制策略作用目标是逆变器,将它等效为电流源,不适合独立混合微电网。文献[11-12]提出的控制策略控制目标为交直流母线接口变流器,但是需要设计额外的系统稳定装置,设计复杂,文献[8]对其进行了改进,但是控制参数是固定的,当负荷变化时会有频率恢复暂态时间过长的问题。
针对上述问题,本文结合文献[8]与文献[10]提出了一种适用于交直流母线接口变流器的自适应参数虚拟同步机控制技术,使得变流器拥有惯性与阻尼,并且对于频率暂态恢复时间过长进行了改进,最后通过Matlab/Simulink 仿真分析了转动惯量与阻尼系数大小对于系统性能的影响,并验证了所提控制策略的有效性。
1 虚拟同步机基本原理
图1 为本文采用的交直流混合微电网结构拓扑图,直流侧由储能设备、光伏发电、直流变换器和直流负载组成,交流侧由储能设备、交流负载和交直流变换器组成,交直流母线之间就是本文的控制策略的控制对象换流器。

图1 交直流混合微电网结构拓扑图
图2 为虚拟同步机的主电路拓扑,由三相电压源变换器分别通过直流电容、直流阻抗和LC 滤波器、线路阻抗连接至直流母线和交流母线。
根据图2 可以得出交流侧的电压方程和功率方程为:

图2 虚拟同步机的主电路拓扑


可以看出式(1)~式(3)与同步发电机的电压、输出功率方程相似,由此可见该变换器可以实现类似同步发电机一样的功率双向传输。本文的控制思路是采集经过滤波电路前的电流、经过滤波电路后的电流和电压、直流母线电压作为虚拟同步机控制的输入,经过计算后得到变流器所需要的脉冲信号。
1.1 功率控制
虚拟同步机的功率控制包括有功控制和无功控制两部分,具体控制框图如图3 所示。

图3 虚拟同步机有功-无功控制框图
1.1.1 有功控制
在虚拟同步机控制方法策略中,模拟传统同步发电机的转子运动方程使其自身拥有惯性响应与阻尼,从而抑制系统频率剧烈波动,使系统能够稳定运行。虚拟同步机的转子运动方程如下:

式中:为转动惯量;ω为额定角频率;为虚拟转子角频率;为机械功率;为电磁功率;为阻尼系数。
交流微电网的有功功率变化量为:

直流微电网的有功功率变化量为:

式中:,为有功功率参考值与测量值;,为直流电压的额定值和测量值;k为直流电压下垂控制系数;为直流电容大小。
交流微电网和直流微电网连接在一起,有功功率变化量应该是相同的,即:

结合式(9)和式(5)可得:

式(10)即为图3 中的有功控制部分。
1.1.2 无功控制
虚拟同步机的无功控制部分采用电压下垂控制,模型如下:

式中:为后续内环控制环节的电压参考值;为变流器的端口电压参考值;为无功功率参考值;为无功功率采集值;k为无功电压下垂控制系数。
1.2 虚拟阻抗
为了更好地模拟同步发电机准静态特性,增加虚拟阻抗环节,具体如下:

式中:u,u为下级电压参考值的分量;R,L分别为虚拟电阻和虚拟电感;i,i为输出电流分量。对应框图如图4 所示。

图4 虚拟阻抗框图
1.3 电压电流控制
该处控制即为主流控制方法——电压电流双闭环控制,其主要原理就是利用上文所得u和u,经过PI控制后获得PWM 调制信号,此处不详细说明,关键在于电压与电流环的PI 控制系数k,k和k,k。
1.4 自适应控制


表1 不同情况下转动惯量和阻尼系数的选取原则
根据表1 设计如下转动惯量自适应控制策略:

式中:为初始转动惯量;为初始阻尼系数;k为转动惯量控制系数;k为阻尼系数控制系数。
2 仿真分析
基于Matlab/Simulink 仿真软件搭建了如图1 所示的虚拟同步机控制的混合微电网系统,验证本文所提控制策略的有效性。上文控制策略中的仿真参数见表2。

表2 仿真参数设置
2.1 整流模式
在=1 s 时,直流侧负荷增加1 000 W;=2 s 时,直流侧负荷减少1 000 W,换流器工作在整流模式,交直流电网各自承担500 W有功功率,换流器中流过了-500 W的有功功率。交流频率、直流电压和传输功率的仿真图如图5~图7 所示,在1~2 s 期间直流母线稳态值为399 V,频率稳态值为49.9 Hz。

图5 整流模式不同控制策略频率对比

图6 整流模式不同控制策略直流母线电压对比

图7 整流模式不同控制策略有功功率对比
由图5~图7 可以看出,转动惯量和阻尼系数的自适应控制策略与定参数控制策略相比,对于频率的优化效果更好,在1~2 s期间,频率下降更为缓慢,而在2 s时刻频率上升时,定参数控制模型达到新稳态的用时是0.6 s,自适应控制策略达到新稳态用时为0.3 s,频率的恢复速率得到显著提高。
2.2 逆变模式
在=1 s 时,交流侧负荷增加1 000 W;=2 s 时,交流侧负荷减少1 000 W,换流器工作在逆变模式,交直流电网各自承担500 W有功功率,换流器中流过了500 W的有功功率。交流频率、直流电压和传输功率的仿真图如图8~图10 所示,在1~2 s 期间直流母线稳态值为399 V,频率稳态值为49.9 Hz。
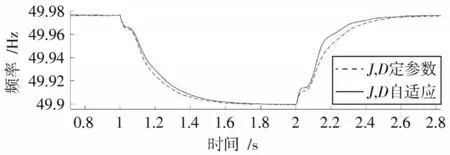
图8 逆变模式不同控制策略频率对比
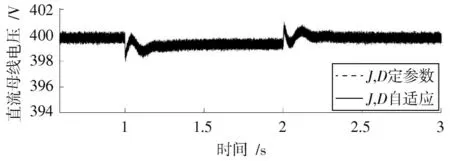
图9 逆变模式不同控制策略直流母线电压对比

图10 逆变模式不同控制策略有功功率对比
由图8~图10 可以看出,转动惯量和阻尼系数的自适应控制策略与定参数控制策略相比,对于频率的优化效果更好,在1~2 s 期间,频率下降更为缓慢,而在2 s 时刻频率上升时,定参数控制模型达到新稳态的用时是0.5 s,自适应控制策略达到新稳态用时为0.4 s,频率的恢复速率得到显著提高。
综上可以看出,交直流换流器不管是工作在整流模式还是逆变模式,虚拟同步机定参数和自适应控制策略都能够使系统拥有惯性。定参数控制策略达到了降低频率下降速度的目的,但是频率恢复速度也一样减慢了,自适应参数控制策略则有效地解决了这个问题,在频率下降时使得下降速度减慢了,在频率恢复时恢复速度得到了有效的提升。
3 结 语
本文在基本的交直流混合微电网换流器虚拟同步机控制策略的基础上增加了转动惯量和阻尼系数自适应控制得到一种新的控制策略,有效地解决了在定参数虚拟同步机控制策略下为了使频率下降缓慢会导致频率恢复时间变长的问题。通过Matlab/Simulink 的仿真验证可知:本文的自适应参数虚拟同步机控制策略进一步减缓了频率的下降速度,同时加快了频率的恢复速度,进一步提升了混合微电网系统的稳定性。
