基于MRE 与特征类的轴承故障诊断方法*
2022-06-13李富国王俊元武增荣林炳乾吕品德范瑞天
李富国 王俊元 武增荣 林炳乾 吕品德 范瑞天
(①中北大学机械工程学院,山西 太原 030051;②山西航天清华装备有限责任公司,山西 长治 046012)
滚动轴承已经成为现代机械设备中必不可少的零部件之一[1]。因为其工作环境恶劣,极易造成轴承的损坏[2]。损坏的原因一般有滚子故障、内圈故障和外圈故障。因此,研究滚动轴承的故障诊断方法具有很实用的工程价值[3]。
近年来,熵理论被引入到故障诊断领域中,在轴承的振动信号特征提取中表现出极其良好的效果[4]。为了更全面地提取故障特征,李永军等人[5]结合熵理论与多尺度分析方法提出了多尺度模糊熵应用在旋转机械故障诊断。
滚动轴承的振动信号具有明显的非线性特征。传统的特征提取方法很难有效地提取隐藏的故障特征[6]。由于其滚动轴承工作环境复杂多变,同一故障的振动信号的幅值也会随着发生变化,这会导致轴承故障识别的精确度下降[7-9]。为了克服上述不足,针对传统时频域指标由于信号的非线性特征无法准确提取轴承故障特征向量且难以识别轴承的每一类故障特征等问题,提出了一种基于MRE 和EigenClass[10]分类方法来诊断轴承故障模式,并验证了该方法的优越性。
1 基本原理
极差熵(range entropy,RE)的理论是基于近似熵和样本熵的方法上提出来的。近似熵和样本熵是通过计算重构m维相空间中两个状态向量和之间的切比雪夫距离来提取的条件概率。
首先进行相空间重构,对于给定的时间序列xi={x1,x2,x3,···,xN},从其原有排序中选取m个数据点组成为一个新的序列,从而得到相空间

式中:m表示嵌入维度,t表示延迟时间。为m维相空间的状态向量。当t=1 时,那么,原始序列就被划分为m个新的序列。

Amir Omidvarnia 根据熵与信号自相似之间的联系,由自相似度评估中的重标极差分析思想提出了全新的计算距离的公式,并将其命名为,如式(3)所示。

式中:Ψ (·)为Heaviside 函数,表达式如下所示。

极差熵性能良好,但是只在一个尺度中对时间序列的复杂度进行评估,无法全面地提取时间序列中的有效信息。因此,我们引入了多尺度分析的思想。对于xi={x1,x2,x3,···,xN},首先用式(8)进行粗粒化操作。

式中:τ表示尺度因子。当τ=1 时,时间序列为原始时间序列。

2 基于MRE 与EigenClass 轴承故障诊断方法
EigenClass 分类器具有分类精度高,所需时间少的优点。首先,给出了一些有关特征类算法的基本概念。A=[aij]表示一个数据矩阵。这个矩阵是m×n。其中,m和n分别表示数据矩阵中的属性数和样本数。Atrain表示从A矩阵中获得的训练矩阵,其中最后一列包含数据的类标签。Atest表示从A矩阵中获得的测试矩阵。Ar表示A的提取的r-class 矩阵,其中是r=1,2,···,l类数。表示的是的第i行。下面用定义描述了EigenClass算法的概念。
定义 1 给定A和B两个矩阵和x是一个非零的n维向量。如果存在一个标量λ使得Ax=λBx,然后,根据B,λ被称为A广义特征值或A的简要e特ig征(A值,B。)根据B包含A的所有特征值的向量可得到eig(A,B)

为了确定矩阵的特征值,矩阵应该是方形的。然而,用于分类的数据集中的每个样本通常表示为数据矩阵的行。因此,我们将数据矩阵的每个样本转换为一个对角矩阵。
定义3 给定x=(x1,x2,···,xn)∈Rn。x的对角线形式,定义为diag(x)如下所示

EigenClass 算法工作原理主要步骤如下:
(1)从矩阵A中获取Atrain和Atest。
(2)分配一个非常小的值(0.000 1)而不是零,进行这种分配的原因是需要使用非零元素来计算广义特征值。
(3)对于所有r,从训练矩阵Atrain中提取rclass 矩阵。
(4)对于所有i、r和t,计算和的广义特征值,然后通过到的准距离值构造矩阵Br。
(5)Br每一行的元素按升序重新排列。
(6)最小值意味着最大相关性。通过每个升序行的k-mean 形成一个列矩阵,以提高接近度。
(7)k是算法可以调整的自由度。最后,通过对列矩阵中最小元素对应的行号进行运算,找到测试数据中样本的分类标签。
这样的方法可以确定测试数据中所有样本的类标签。
基于以上分析,本文将多尺度极差熵特征提取与EigenClass 算法的优势相结合,提出一种故障诊断方法,故障诊断流程图如图1 所示。步骤如下:

图1 MRE 与EigenClass 故障诊断流程图
(1)分别采集不同状态下的滚动轴承的振动信号,并记录数据。
(2)将一维的时间序列轴承的振动信号输入到多尺度极差熵程序中,提取滚动轴承不同状态下的振动信息。
(3)最后一步的工作是模态识别。将多尺度极差熵提取的特征向量作为EigenClas 的输入,通过EigenClass 程序计算,可以得到滚动轴承故障识别的分类结果。
3 实验分析
实验采用美国凯斯西储大学(CWRU)的开放访问的实验轴承数据集来评估该方法对滚动轴承的不同故障类型分类的准确性。实验装置如图2 所示。采集的轴承振动信号是在电机转速为1 797 r/min,采样频率为12 kHz 条件下进行的。首先,建立故障类别标签。数据库分别分为正常,滚子故障,内圈故障,外圈故障。按照故障尺寸大小的不同,滚子故障,内圈故障和外圈故障又各分为2 种故障。类别标签如表1 所示,轴承的信号波形如图3 所示。本实验所有的方法都是在MATLAB R2016a 的版本上实现,处理器Intel(R) Core(TM)i5-10210U CPU@1.60 GHz,RAM 为16 GB,操作系统为64 bit 的Win10的计算机上进行测试。

图3 轴承不同工况的信号波形图

表1 不同状态的类标签
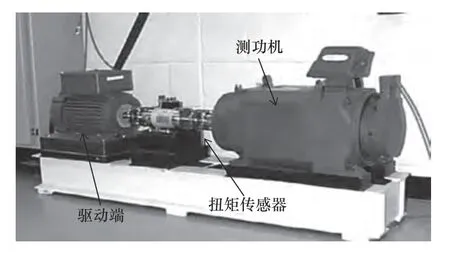
图2 实验装置图
从轴承不同状态下选取50 个样本,样本采样点个数2 048,总计350 个样本。
本文选择MRE 的参数m=2,r=0.2,尺度因子τ=20。然后,利用多尺度极差熵提取滚动轴承的特征向量如图4 所示。由图4 可知,不同尺度下的熵值不一样,能够很好地区分轴承的故障情况。最后,将多尺度极差熵提取的特征向量输入到EigenClass分类器。这里本文使用k倍交叉验证(Kfold=10),分类混淆矩阵的结果如图5 所示。从图中可以看到7 类的分类情况良好,只有标签为6 的外圈故障(0.177 8 mm)在分类精度上有点误差,但总体分类精度良好,MRE-EigenClass 最大分类精度为98.86%。

图4 多尺度极差熵提取滚动轴承的特征向量

图5 分类结果混淆矩阵图
为了进一步验证所提方法的故障识别方法的良好性能,这里将MRE-EigenClass 和 k-最近邻(KNN)、支持向量机(SVM)、线性判别(DA)、决策树(DT)及随机森林(RF)分类器进行了比较实验。每种方法的训练样本和测试样本都与EigenClass 分类器相同。参数设置和分类结果如表2所示。从表中可以得到,MRE-EigenClass 分类结果的精度最高。这说明所提出MRE-EigenClass 故障诊断方法效果优越。

表2 不同方法的分类结果
4 结语
(1)多尺度分析方法将给定的信号进行粗粒化处理,将信号分解在不同的尺度,结合熵理论得到不同的尺度的熵值,从而全面地提取时间序列中的有效信息。基于多尺度极差熵比极差熵能够在更多尺度上完整的提取滚动轴承振动信号,充分表达故障信息。
(2)经过大量的对比试验表明,本文提出的多尺度极差熵与EigenClass 故障诊断方法和多尺度极差熵与其他分类器方法相比,多尺度极差熵与EigenClass 故障诊断方法分类准确率明显高。
(3)多尺度极差熵和EigenClass 的故障诊断方法能够准确地进行滚动轴承故障诊断。但目前多尺度极差熵算法中参数m和尺度因子τ的设置还需依靠经验、EigenClass 分类算法对其他数据集的泛化性,解决这些问题将是笔者后期的研究目标。