物料搬运机械手机构运动学分析及仿真
2022-06-13王吉平
0 引言
随着科技的发达,如今的21世纪已进入了智能化、自动化的时代,人工也满足不了要求更高、更危险的岗位,也因此发明创造出机械手来代替人工。随着机械手技术的逐渐成熟,而物料的搬运与管理又是企业生产中的关键一环,越来越多的企业优先考虑使用机械手设备,因此机械手在物料移动、运输领域越来越流行。
本文通过建立D-H坐标,分析机械手机构的运动学正、逆正问题,为仿真分析提供理论基础;并使用建模软件对机械手进行三维建模,并借助软件进行运动仿真,得到各构件的位移、速度和加速度曲线图,通过分析曲线图验证构件设计的合理性,可为机构进一步的优化提供基础。结合运动学分析就能分析出该产品如果在投入使用的时候真实的工作状态和受力情况,对不好的地方进行改进,不断地完善产品性能,最终达到使用要求和性能以及经济性的要求。
1 物料搬运机械手结构
机械手的组成大致主要分为3个部分:执行元件,控制元件,驱动元件。执行元件主要包括手指、手部和躯体;机械手的控制系统相当于人类大脑的“中枢神经”;一般的驱动形式主要包括机械、电力、液压及气压4种形式。
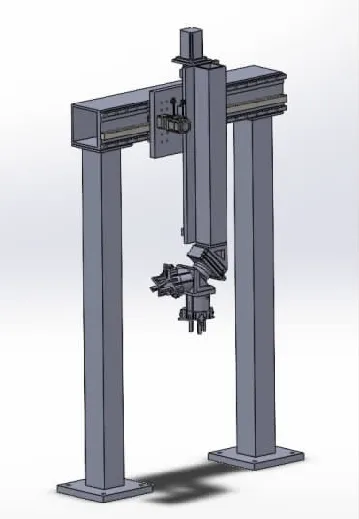
本文研究的搬运机械手具备某零件在机械加工过程中物料的抓取、送料至卡盘先抓取已加工物料再进行新物料的装夹、将已加工物料送回的功能。机械手结构简图如图1所示,共有三个自由度,X、Z轴方向的移动和一个转动。整个机械手通过PLC控制,X轴和Z轴选用的是电力传动,使用伺服电机驱动零部件运动,而末端执行器则通过一个摆动气缸实现旋转,并且能旋转180°。为了实现上下料工作能在同一个行程内进行,本文选用机械手的末端执行器有两个手爪,一个夹取待加工零件,另一个夹取已加工零件。
按照每月练兵成绩,对照考核细则,对当月练兵成绩优秀的队员进行奖励,并对成绩不达标的队员进行惩罚,考核结果兑现在当月工资中。同时,全年的考核情况也为年底评先选优的重要依据,练兵中出现不合格情况的队员,不在岗位标准作业流程先进个人评选范围。

2 运动学分析
从机器人运动学方面分析,大部分都是去探究机械手的各种运动,以及去探讨各个坐标系相互间的关联,但是要忽略掉导致运动的力和力矩。机器人的空间位移表达式应用时间的函数来表示,能展现出关节与关节之间及末端执行器之间的位姿情况。运动学研究的是机械手各个连杆坐标系之间的位置关系,运动学问题又分为正运动学和逆运动学,解出正、逆问题的解可为后续仿真分析提供理论基础。
2.1 齐次坐标及坐标变换
齐次坐标及坐标变换适用于机器人的机构描述与运动学分析。齐次坐标就是用N个数去描述N维坐标的一种方式。四个不同时为0的任意数称为三维空间的点的齐次坐标。而齐次坐标变换就是把经过平移或旋转后的坐标矢量变换为参考坐标系所描述的矢量。

根据机械手的实际情况设定各部件运动参数(位移、时间),以下函数按照构件在多少时间内运动到什么距离编写的,即:
2.2 D-H坐系标建立
在机器人研究中,最常见的连杆坐标系建立的方法是D-H法。D-H坐标系主要内容为:先建立参考坐标系,再根据前一个关节建立自身的坐标系,以此类推,建立末端执行器的坐标系,再通过相邻坐标系之间的变换可推出末端执行器与机架之间的变换,进而写出运动学方程,可对其进行求解。按照坐标系确定规则,可建立本文研究的机械手的D-H坐标系,如图2所示。

景德镇永宣年间青花缠枝纹饰种类繁多,如叫作“忍冬”的金银花,属于佛教装饰题材。而象征着“出淤泥而不染”的荷花题材,是这个时期景德镇青花瓷使用率最频繁的装饰纹样。牡丹纹象征着富贵,而葫芦、葡萄、石榴等象征的是多子多福。
三维仓库仿真场景的建立能够全方位、更直观地提供仓库内的各种信息,并可以实现仓库漫游,感受与真实仓库相似的体验。三维仓库仿真场景可以实现多层次,区域切换,任意漫游,放大缩小旋转等立体三维方式查看和浏览仓库信息,并能快速定位问题的原因和位置。
以CCT为指标绘制倒漏斗图,详见图8。由图8可知,各研究散点均分布在倒漏斗图范围内,对称性较好,提示本研究存在发表偏倚的可能性较低,结论较可靠。
“目前物流行业的并购分为两种,一种是企业之间的合并,一种是企业内部的整合。”张志强称,58速运和GOGOVAN合并,中国外运收购招商局物流集团,万科入主普洛斯物流地产,都属于前者;而上海远成物流和远成快运的合并,则属于企业内部的资源整合。
2.3 运动学正问题
通过相邻坐标系之间的变换可推出末端执行器与机架之间的变换,且运动学正问题的解是唯一的。
将表1中的数据分别代入下面表示相邻的两连杆坐标系变化的表达式中,则可计算出上述机械手相邻连杆坐标系变换的矩阵。

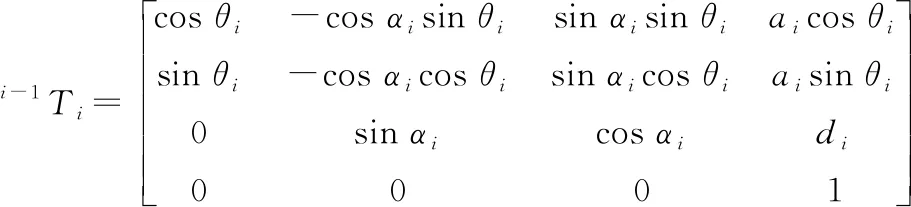
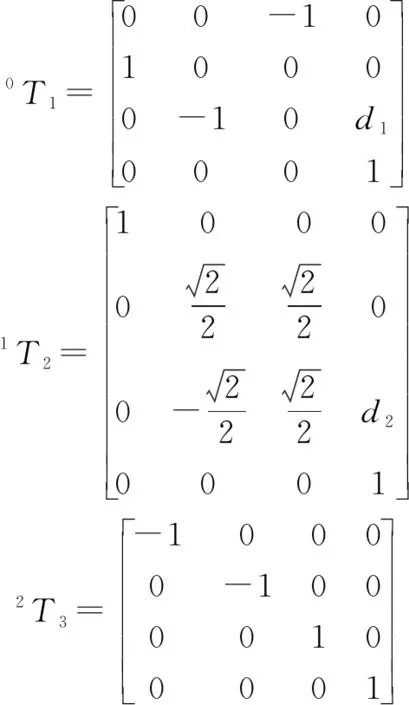
各坐标系之间的变换矩阵如下:
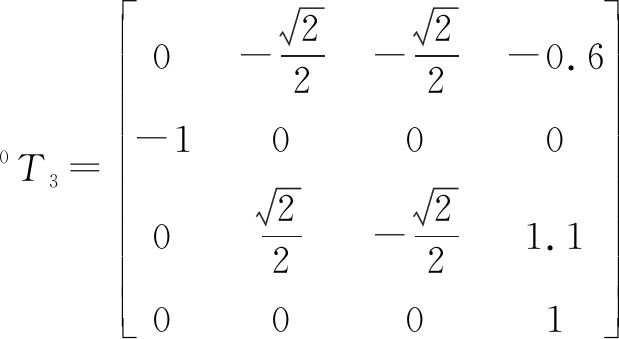
并为本文的机械手设定一个运动过程:
以上正解就是机械手的末端执行器相对于参考坐标系的位姿情况。
2.4 运动学逆问题
与正运动学不同的是,逆运动学问题则是依照已知末端执行器的位姿来确定机器人的关节变量。而且,逆运动学的解不像正运动学的解是唯一的,它可能有解,也有可能无解,即使有解也可能不是唯一的。所以解逆运动学问题,一般是得到闭式解。
c)竖梁:step(time,2,0,4,550)+step(time,12,0,14,-550)+step(time,17,0,18,300)+step(time,22,0,23,-300)+step(time,26,0,28,550)+step(time,36,0,38,-550);
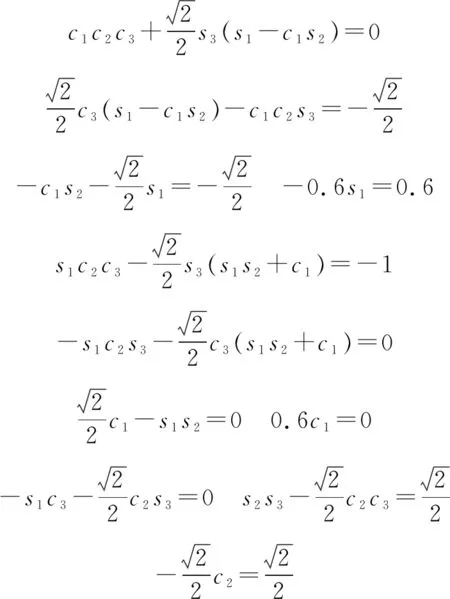
其中
=sin
,
=sin
,
=sin
,
=cos
,
=cos
,,
=cos
。根据方程组,求出
、
、
的值即为逆解。由以上可知,方程组有无数个解,其中一组解为
=90°,
=0,
=180°,满足正解。
3 Adams运动仿真分析
3.1 运动学仿真结果分析
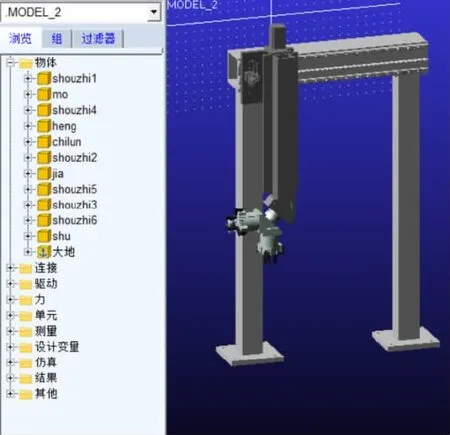
使用Solidworks软件对机械手完成三维建模,并将三维图导入Adams中进行运动仿真分析,如图3、4所示。在模型中的连接处添加约束:机架与地面之间添加固定副;齿轮与横梁挂板之间添加转动副;横梁挂板与机架之间添加移动副;竖梁与横梁挂板之间添加圆柱副;末端执行器与竖梁之间添加转动副;6个手指与末端执行器之间添加移动副。
θ-关节角:关节相邻两公垂线在法线平面上的投影夹角。d -连杆偏置量:相邻两公垂线沿关节轴之间的距离。 a-连杆长度:两关节轴之间的公垂线距离。α -连杆扭转角:相邻关节轴在X平面的夹角。表中
=1100mm,
=600mm,
=180°。
b)齿轮:step(time,5,0,8,1200d)+step(time,29,0,32,-1200d);
老板娘羡慕地说:“许春花进门后,周二就差一点没把她当菩萨一样供起来了——捧在手里怕掉了,含在嘴里又怕化了,反正周二在家的时候,什么重活、脏活他都不让许春花沾上手,那会儿可眼馋死咱们镇上的那帮娘们儿了。”
创新是引领发展的第一动力,是建设智慧城市的战略支撑。扬中市产业特色鲜明,智慧城市建设给扬中传统产业带来新机遇的同时也带来了新挑战。虽然扬中已经在加快主导产业与现代信息技术的融合,但不可否认的是扬中市传统产业的自主创新能力仍然较弱,部分产业项目建设进展较为缓慢,而新产业、新业态的成长需要更长时间,大项目、新项目的储备不足,导致城市发展后劲较弱。
a)0~1s:手爪1夹取;b)2~4s:竖梁上升550mm;c)5~8s:横梁挂板向右平移800mm;d)9~11s:末端执行器旋转180°;e)12~14s:竖梁下降550mm;f)15~16s:手爪2抓取;g)17~18s:竖梁上升300mm;h)19~21s:末端执行器旋转180°;i)22~23s:竖梁下降300mm;j)24~25s:手爪1放下;k)26~28s:竖梁上升550mm;l)29~32s:横梁挂板向左平移800mm;m)33~35s:末端执行器旋转180°;n)36~38s:竖梁下降550mm;o)39~40s:手爪2放下。
式中,
是齐次坐标变换矩阵,是一个4×4阶矩阵,表示了被描述的坐标系中的点经过
的变换后变成了参考坐标系中的点。
为旋转矩阵,
为平移矩阵。
a)横梁挂板:step(time,5,0,8,800)+step(time,29,0,32,-800);
再对模型添加“驱动”,包括:平移驱动(适用于移动副和圆柱副),旋转驱动(适用于转动副和圆柱副)。驱动作用于约束之上,所以在上述的约束之上添加相对应的驱动,即在转动副处添加旋转驱动,其余移动副出添加平移驱动。
本文中解决的是一般的逆运动学问题,即根据给定的齐次变换矩阵和机械手的其他参数,求出其关节变量。根据已知的末端执行器的位姿表达式,再结合坐标系变化的表达式及表1,可列出以下非线性三角函数方程组:
假如未成年人不可以见义勇为,见义勇为的时候也不应该受到鼓励的话,那么社会风气将变得无比漠然,我们又该如何弘扬正气,弘扬我们心目中的正义呢?
d)末端执行器:step(time,9,0,11,180d)+step(time,19,0,21,-180d)+step(time,33,0,35,180d);
e)手指1、2、3:step(time,15,0,16,15)+step(time,39,0,40,-15);
f)手指4、5、6:step(time,0,0,1,15)+step(time,24,0,25,-15)。
完成函数编写及其他操作后,再设置终止时间为10和步数为2000,并选择分析类型里的运动学。完成以上操作后即可进行运动仿真,得出构件的曲线图,包括位移、速度和加速度曲线图。
a)横梁挂板分析
根据分析,横梁挂板只在5~8s和29~32s时间段内进行了左右平移,位移、速度及加速度都只在X方向上有变化。在启动和停止的瞬间,加速度波动较大,其余时间相对稳定;运动期间,速度最大值达到0.4m/s。
b)竖梁分析
今年7月一名中年男子持刀作案,致两名女子一死一伤后,逃离了现场……这时一个网名叫“棉花糖”(真名邱波,娄底市第一人民医院护士)的女孩挺身而出,一边用卫生巾给伤者止血,一边请周围一个正拍着视频的男子给120打电话,然而,此人冷漠地拒绝了。想在旁边的米粉店坐一下,老板连声赶她们走。后来,“棉花糖”叫了出租车,与同行的表姐一起将伤者送到了就近的医院,伤者才因此得救。
由于竖梁与横梁挂板相连,即使竖梁不运动,也会随着横梁挂板一起运动,所以在X方向上的位移、速度及加速度图与横梁挂板相同。竖梁在Y方向的6次运动时,速度最大值分别达到0.45m/s和0.41m/s;在启动和停止瞬间,加速度波动较大。
叶绿素含量测定采用Deng[9]等的方法稍作修改。青圆椒组织用4 ℃的丙酮:乙醇(2:1)溶液匀浆,在通风橱内避光过滤至50 mL棕色容量瓶中,至青圆椒匀浆组织变白,然后定容至刻度,测定66 nm和645 nm处吸光值。
c)末端执行器分析
根据分析,由于末端执行器与竖梁相连,且末端执行器旋转也不影响位移的变换,故位移曲线图与竖梁相同。由于末端执行器与竖梁相连,在X、Y方向上的速度与竖梁相同;而在9~11s、19~21s、33~35s时间内旋转了180°,对X、Y的影响较小,主要为Z方向上的速度变化。
由于末端执行器与竖梁相连,在X、Y方向上的曲线图与数量相似,但Z方向上较为明显,在开始转动和停止瞬间,波动较大之外,其余时间较为稳定。末端执行器只在X、Y方向上有角加速度变化,最大值达到95d/s。
对各部件的三种曲线图的分析,各部件的位移较为平滑;都做的是变加速运动,没有出现太大的波动,运动较为平稳;不需要高精准的定位时,启动和停止瞬间的加速度的较大跳跃是允许存在的。故整个机械手装置运动较为平稳,各构件设计合理,选择的方案可行。
4 结论
本文以三自由度的物料搬运桁架式机械手为研究对象,对其运动学问题进行分析研究,通过建立D-H坐标,写出运动学方程,求出正、逆运动学问题的解,了解机械手在空间的运动情况,及末端执行器的位姿情况,为后续运动仿真分析做基础。使用Adams对机械手进行运动学仿真分析,输出运动动画和横梁挂板、竖梁和末端执行器的位移、速度和加速度曲线图,分析曲线图,最后得出机构设计合理、方案可行。
随着德国“工业4.0”计划和中国“智能制造2025”的提出,自动化设备稳定发展取得了巨大的进步,机械手在未来的发展方向是智能化、机电一体化、高精度、高效率、环保等等。不仅可以在各种环境下正常运行,而且还可以长时间的工作,以更高的效率完成任务,成本也很低。
[1]谷明雨. 物料搬运机械手的系统分析与仿真[D]. 沈阳:东北大学,2006.
[2]杨韬,蔡长韬,周延,马飞达. PCB上下料机械手设计与仿真[J]. 机床与液压,2017,45(21):26-30.
[3]李桂莉, 武洪恩, 刘志海. 搬运机械手的运动学分析[J]. 煤矿机械,2007,28(02):62-65.
[4]许琳. 物料搬运机械手的建模与仿真[D]. 济南:齐鲁工业大学,2016.