无人驾驶汽车采用电驱系统的优势研究
2022-06-13李智博李润哲朱宇东
0 引言
节能、环保技术路线已成为汽车领域发展的主流方向,新能源汽车的发展越发受到政府与行业的青睐与支持,而无人驾驶技术在提升主动安全、改善交通效率以及降低能耗等方面也有着巨大的潜能,其已成为当前汽车行业的研究热点,无人驾驶关键技术主要包括环境感知、高精地图与组合定位、智能决策与运动规划以及运动控制。其中,车辆的运动控制根据运动规划输出和实时反馈的行驶状态来控制底盘执行器,使车辆迅速、稳定、平滑、精确地跟踪期望路径,车辆运动控制作为无人驾驶技术的核心环节之一,其性能表现直接影响车辆行驶安全和用户体验
。近些年针对无人驾驶汽车的开发与商用发展迅速,各大汽车品牌几乎都采用了电动汽车作为技术应用对象。无人驾驶技术选择电驱系统主要有以下五方面优势,首先符合节能环保的大趋势,遵循地球生态保护与经济可持续发展战略;其次新能源汽车已成为未来的主流发展趋势,采用电驱系统更符合未来市场需求,也更容易得到政策支持和消费者的认可;第三是采用电驱系统能够使动力输出获得更高的控制精度和更快的控制响应;第四是无人驾驶技术需要使用大量传感器和控制单元等用电设备,会给整车增加百瓦以上的功耗,传统汽车的12V蓄电池已经不堪重负,而电驱系统具有更大的供电能力,很容易满足用电负荷的要求。第五是电驱系统占用整车空间相比传统汽车要小很多,在不牺牲车内乘坐和储物空间的情况下可以提供更加充足的空间来放置无人驾驶控制计算平台。为进一步深入探究电驱系统在无人驾驶技术路线上的优势,本文以某电驱系统用永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)为载体,通过Matlab/Simulink仿真软件搭建了基于最大转矩电流比(Maximum Torque per Ampere,MTPA)控制、弱磁(Flux Weakening,FW)控制以及最大转矩电压比(Maximum Torque per Voltage,MTPV)控制的矢量控制模型
,研究了永磁同步电机的动力输出特性。
当前我国学校教育教学结构中,人们大多将知识内化不足归因于学生过度依赖教师讲授,普遍认为是学生自主学习意识薄弱,致使课程设置脱离现实应用、授受形式缺乏更新,以及课程知识滞后社会发展。因此,“人工智能+教育”课程设置的首要任务,就是要利用大数据跟踪技术扁平化连接教育资源以实现国际共享,进而设定动态开放的课程结构,以具有国际视野的知识信息激发学生的学习兴趣。只有实现这样的课程设置,才可能实现国际化能力培养的教学目标。
1 数学模型
两相旋转坐标系下d-q轴电压方程为:

(1)

(2)
电磁转矩方程为:
2.4.1 创建BmobRealTimeData对象 BmobRealTime-Data是Bmob SDK提供的用于实现安卓端与后端云数据实时同步的对象,昆虫生境数据移动监测软件在InsectActivity中创建了一个该类型的对象data。

(3)
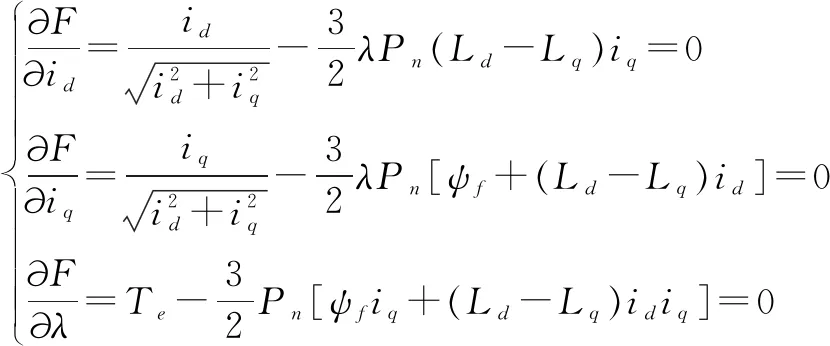
令(7)式分别对
、
以及
的偏微分等于零,如下式所示:
对(1)、(2)式简化,
较小,可以忽略,稳态时d-q轴电流不变,即其对时间的导数为零,简化后的结果带入(4)式可得:
(4)

(5)

对(11)式进行联立化简可得如下一元二次方程:

(6)
由式(5)和(6)可知,d-q轴电流大小被限制在圆形的电流极限圆和椭圆形的电压极限圆所共同约束的范围内。MTPA和MTPV控制阶段需要在约束d-q电流条件下进行求解电磁转矩极值,可以采用直接求解、查表、迭代以及拟合等方法来获取d-q轴最优电流分配
,文献[9]采用直接求解法,计算量大,但可移植性好,文献[10]采用查表法,可移植性差,高速存储单元花费代价高,但系统实时性好。文献
采用迭代法,等计算精度条件下其耗时量较大,实时性较差,但可移植性较好。文献[12]采用分段低次多项式拟合,计算量小,但可移植性较差,而文献[13]对电流和转矩关系式标幺化处理后再进行分段三次多项式拟合,计算量相对增加,但提升了可移植性。本文采用拉格朗日极值法进行直接求解。构造辅助函数(7)以求解MTPA控制下d-q轴电流值:

(7)
式中:
,
分别为d-q轴电压分量;
,
分别为d-q轴电流分量;
,
分别为d-q轴电感分量;
为电角速度;
为永磁体产生的磁链;
为定子线圈电阻;
为极对数。坐标变换均采用等幅变换,即d-q轴电流和电压为实际值的2/3,而为保证d-q轴磁链大小不变,d-q轴电感为实际值的3/2。
(8)
对(8)式进行联立化简可得如下一元四次方程:

(9)
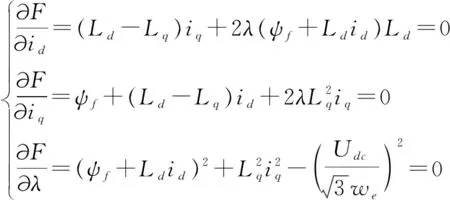
令(10)式分别对
、
以及
的偏微分等于零,如下式所示:
构造辅助函数(10)以求解MTPV控制下d-q轴电流值:
1.3 观察指标 比较两组患者的受伤情况(包括致伤原因构成比和术前ISS),术后并发症发生率和病死率,术后恢复情况相关指标(包括休克纠正时间、体温恢复时间、乳酸清除时间、PT恢复时间、住院时间)。

(10)
此一元四次方程的求解可以通过simulink直接反馈迭代进行求解
,本文采用费拉里求根公式直接进行求解。
(11)
管理上的复杂程度远远大于技术,而资源整合的难点恰恰可以通过BIM信息化技术来解决。充分考虑生产过程的要求,对构件的运输方案进行规划,如道路限高、桥梁荷载、施工堆场和构建转运做出合理的规划,及时传递信息,达到合理安排生产和施工工期,环环相扣,提高效率,降低成本的效果。

(12)
2 仿真研究
基于上文数学模型,搭建Matlab/Simulink仿真计算模型,如图1所示,Matlab/Simulink采用图形化交互环境,可以使用其进行建模、分析和仿真各种动态系统(包括连续系统、离散系统和混合系统)。本文电机控制仿真模型采用双闭环控制,即对转速和d-q轴电流进行PI控制,由公式(1)和(2)可知,永磁同步电机
,
分别都同时与
,
的大小相关,即彼此相互交叉耦合,随着电机转速的增加,耦合影响变大,电流环特性会逐渐变差,特别是在弱磁阶段高速区,耦合影响会造成电流跟踪误差较大,从而影响转矩输出性能
。
(2)降低团队组建成本。合伙人要求起码在阿里任职五年以上,在遇事决策时已经形成了管理团队的基本构架,也降低了企业传承交接过程中,团队组建磨合所形成的各种隐性和显性成本。通过管理团队的组建前置,合伙人制度也同时实现了公司治理机制的前置。现代企业广泛运用董事会监督、高管薪酬合约设计等公司治理机制来减缓代理冲突,降低代理成本(王烨等,2012)。而阿里预先通过共同认同的价值文化体系的培育和雇员持股计划的推行,使得在事前一定程度上解决了代理问题,为未来长期合作共赢奠定了基础。
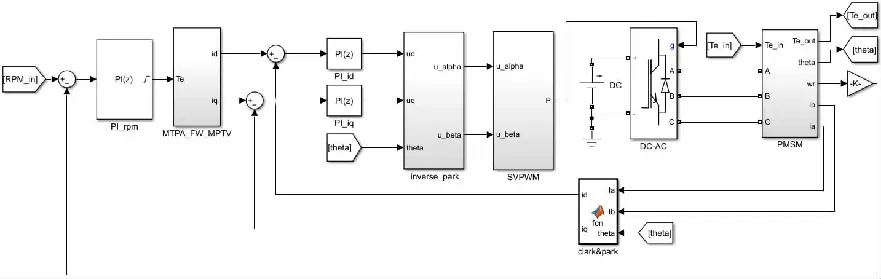
d-q轴电流的耦合项分别为
和
(
+
),随着转速的升高,耦合项所占比重较大,不能被忽略,故为消除耦合效应的影响,本文在反park模块中提前加入了电流环前馈补偿控制。
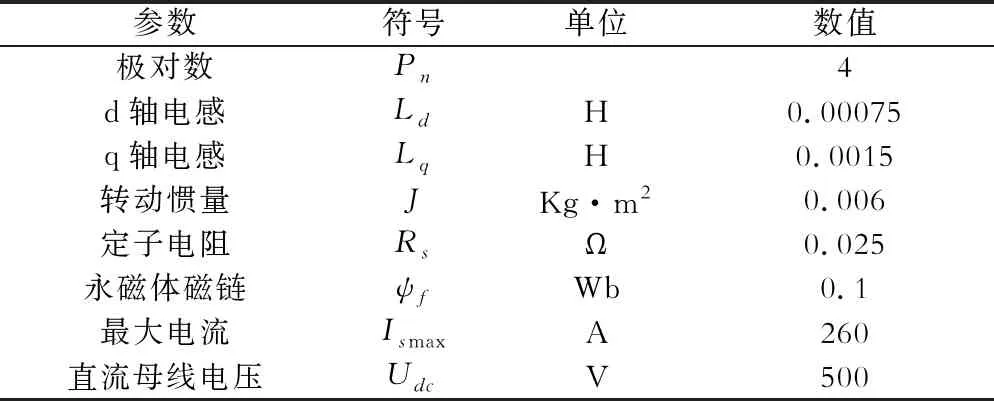
选用永磁同步电机模型参数如表1所示。
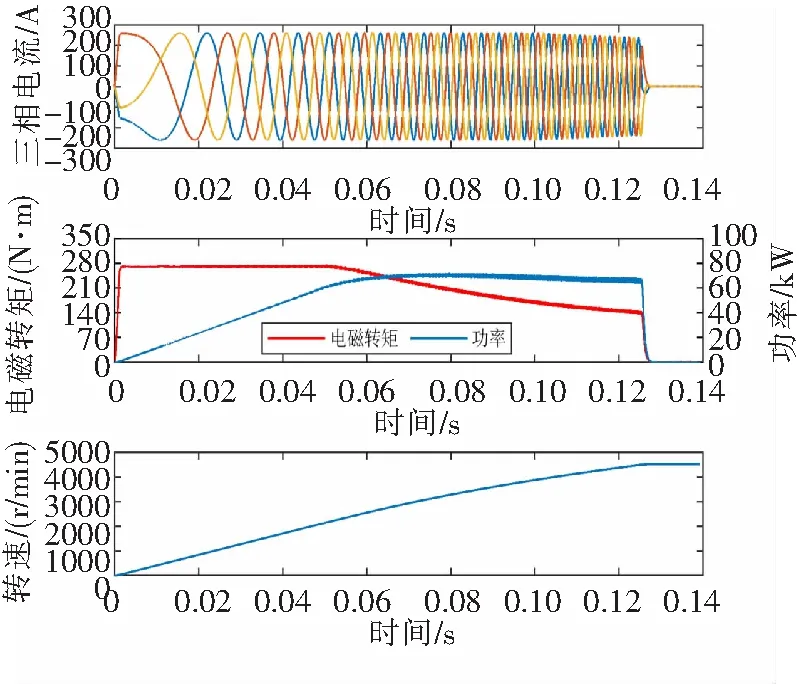
仿真条件为空载加速,初始转速为0,目标转为为4500 r/min,加速过程保持电机最大扭矩输出以充分利用电机输出能力。d-q轴电流轨迹如图2所示,在此仿真条件下,随着电机转速的增加d-q轴电流先后经过MTPA点、弱磁控制(FW)圆弧轨迹段,由电机磁链和d轴电感参数计算可知特征电流点在电流极限圆内,故FW阶段后可以进入MTPV段,此过程保证了最大限度利用电机的扭矩输出能力。

定子三相电流、电磁转矩、功率以及转速随时间变化曲线如图3所示,定子三相电流在MTPA和弱磁阶段维持在最大电流极限值,进入MTPV阶段后定子电流开始减小,此时功率也开始缓慢下降。永磁同步电机启动时经历0.0012秒即可达到最大扭矩输出,进入MTPA阶段后能维持宽范围的恒扭矩输出,达到弱磁控制阶段后扭矩才开始下降,整个控制过程输出扭矩波动较小,具有低速加速性较好,控制精度高以及响应速度快的优势,在弱磁控制区域,能够维持宽范围的恒功率区,此过程不需要借助离合系统以及多级减速器,通过矢量控制即可实现,而传统发动机则需要配合多级减速器才能够模拟出一定范围的恒功率区。电驱系统的这一优势大大减小了结构复杂程度,降低了动力系统的占用空间和重量,提升了可控制性,非常适合对控制性能要求较高的无人驾驶技术。
3 结论
本文通过Matlab/Simulink仿真软件搭建了基于MTPA控制、弱磁控制以及MTPV控制的永磁同步电机矢量控制模型,MTPA和MTPV控制阶段采用拉格朗日极值法进行直接求解d-q轴电流值,为消除耦合效应的影响,在模型中加入了电流环前馈补偿控制。仿真结果表明,电驱系统控制精度高以及响应速度快,在不加多级减速器的情况下能够实现宽范围的恒功率输出,具有更理想的动力输出特性,更容易实现无人驾驶过程中的驱动力闭环控制。
[1]熊璐,杨兴,卓桂荣,冷搏,章仁夑.无人驾驶车辆的运动控制发展现状综述[J].机械工程学报,2020,56(10):127-143.
[2]PADEN B, CAP M, YONG S Z, et al. A survey of motion planning and control techniques for self-driving urban vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2016, 1(1):33-55.
[3]何佳,戎辉,王文扬,田晓笛,高嵩,郭蓬.百度谷歌无人驾驶汽车发展综述[J].汽车电器,2017(12):19-21.
[4]肖仁鑫,杨鑫,李军,贾现广.内置式永磁同步电机宽转速范围最小损耗控制研究[J].昆明理工大学学报(自然科学版),2021,46(03):81-93.
[5]宋毓聪,郭淑清.电动汽车永磁同步电机控制策略[J].内燃机与配件,2022(01):62-64.
[6]罗德荣,孙文娇,高剑,刘建成.内置式永磁同步电动机弱磁控制的简化方法[J].湖南大学学报(自然科学版),2012,39(01):57-60.
[7]崔涛,赵彦凯.永磁同步电机线性分段最大转矩电流比近似控制[J].电机与控制应用,2019,46(11):30-36.
[8]张娜娜,沈艳霞.基于磁链观测的IPMSM MTPA控制系统研究[J].微特电机,2021,49(02):43-47.
[9]陈起旭,王庆元,徐俊,邹忠月,曹秉刚.电动汽车用内置式PMSM的MTPA控制算法对比研究[J].微电机,2017,50(04):32-35.
[10]YANG N, LUO G, LIU W, et al. Interior permanent magnet synchronous motor control for electric vehicle using look-up table[C]//Proceedings of The 7th International Power Electronics and Motion Control Conference, 2012.
[11]张文娟,冯垚径,黄守道,高剑.基于迭代法的内置式永磁同步电机最大转矩/电流控制[J].电工技术学报,2013,28(S2):402-407.
[12]MIAO Y, PREINDL M, GE H, et al. MTPA fitting and torque estimation technique based on a new flux-linkage model for interior-permanent-magnet synchronous machines[C]//2016 IEEE Tra nsportation Electrification Conference and Expo (ITEC), 2016.
[13]曹晖,罗峰,周盼,袁义生.永磁同步电机最大转矩电流比控制的仿真研究[J].微电机,2015,48(06):55-59.
[14]宋昱霖. 新能源汽车永磁同步电机驱动控制系统设计[D]. 中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2021.
[15]徐佳园. 永磁同步电机最大转矩电流比控制[D].北京交通大学,2010.
[16]颜伟平,王兵,刘凯,余鑫,李江坪.基于改进型负载转矩观测器的永磁同步电机滑模控制[J].湖南工业大学学报,2021,35(02):15-22.
[17]邹敏,文定都,何宗卿,吴洪涛,胡正国.基于前馈补偿的模糊PI永磁同步电机调速系统[J].湖南工业大学学报,2019,33(03):35-40.
[18]刘栋良,任劲松,林伟杰,徐正华.基于电感辨识的电流解耦算法在内置式永磁同步电机弱磁控制中的应用[J].电工技术学报,2017,32(16):98-105.
[19]齐丽英,王琛琛,周明磊,王剑.一种异步电机的电流环解耦控制方法[J].电工技术学报,2014,29(05):174-180.